一種手部外骨骼裝置、系統及其控制方法
本發明涉及康復訓練裝置,特別是涉及一種手部外骨骼裝置、系統及其控制方法。
背景技術:
1、腦損傷、退行性疾病和多種神經疾病均可能引起手部運動功能障礙。相較于大肢體的粗放運動,手部運動主要涉及手、手指、手腕等部位小肌肉群的精細運動,強烈依賴于感知覺、注意、視覺運動整合等多方面認知功能的參與和配合,背后的神經環路和生理機制更加復雜。傳統的手部運動康復方法以康復治療師輔助下的肢體物理康復為主,治療成本高,不適合當前手部運動障礙患者數量龐大、需求眾多的現狀。同時,康復治療師主要通過幫助患者完成要求的手部動作為主,進行的是被動式的康復訓練,難以誘導神經可塑性,實現大腦相關運動環路的有效恢復,因此康復進程較長、康復效果受限。
2、近年來,隨著機器人技術的發展,可穿戴外骨骼式康復裝置可以通過特定的機械結構帶動手部關節活動,一定程度上可以輔助或者替代康復治療師對手部運動障礙患者進行康復治療。目前市場上已有的手部外骨骼裝置大多不具備可控的、能夠實現自主控制的方案,因此無法實現患者自主康復訓練,只能依賴理療師或家屬輔助操作,自主康復程度不足。
3、進一步地,把腦機接口技術與外骨骼康復裝置相結合,將患者的大腦信號解碼并轉換為外骨骼裝置的控制信號,使得患者可以通過主動調節自身的神經信號控制手部外骨骼裝置完成預期的運動動作,不僅有助于提高患者的參與感和康復訓練積極性,更有助于促進感覺運動相關神經環路的重建和增強,提高康復效率。
4、此外,目前已有的基于腦機接口技術控制的外骨骼康復系統大多采集用戶康復訓練中的頭皮腦電(electroencephalogram,eeg)信號,采集操作相對復雜,且信號容易受到運動偽跡干擾,一定程度上限制了其臨床應用。因此亟需一種采集更加方便,不易受到用戶肢體和頭部運動干擾的外骨骼康復系統。
技術實現思路
1、本發明的目的在于針對現有技術中的缺陷和不足,提供一種手部外骨骼裝置、系統及其控制方法,以實現用戶根據自己的意愿訓練手指,進行康復治療的技術效果。
2、為實現上述目的,本發明采用的技術方案是:
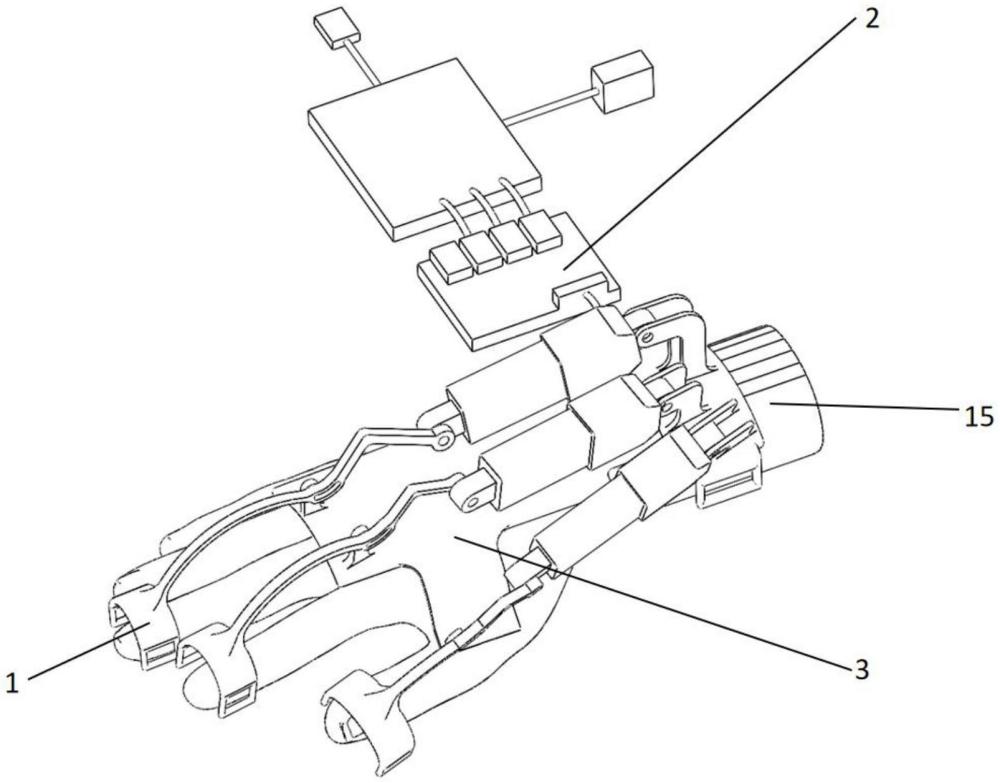
3、第一方面,本發明提供一種手部外骨骼裝置,包括外骨骼和嵌入式控制組件,所述外骨骼包括連桿機構、直線驅動組件和基座;
4、所述直線驅動組件安裝于所述基座,并與所述嵌入式控制組件信號連接,所述嵌入式控制組件還與用于采集用戶大腦信號的信號采集裝置信號連接,所述連桿機構的一端與所述直線驅動組件的伸縮端相鉸接,所述連桿機構的中部與所述基座通過弧形長條孔與銷軸的配合結構相鉸接,所述連桿機構遠離所述直線驅動組件的末端用于固定在用戶的手指上,所述基座用于覆蓋在用戶的手背上。
5、優選地,所述直線驅動組件為直線電機。
6、優選地,所述基座上設有第一支架和第二支架,所述直線驅動組件與所述第一支架可拆卸連接;
7、所述連桿機構的中部設有弧形長條孔,所述弧形長條孔沿所述連桿的長度方向延伸,且所述弧形長條孔兩端所在的圓的圓心之間的距離與手指蜷曲和舒張所需的長度相適配,所述第二支架與所述弧形長條孔相鉸接。
8、優選地,所述連桿機構的數量為一至五中的任意一個,所述直線驅動組件的數量以及所述基座上的第一支架和第二支架的數量均與所述連桿機構的數量相適配。
9、優選地,所述連桿機構遠離所述直線驅動組件的末端通過第一連接組件安裝于用戶的手指,所述第一連接組件為易撕的粘接裝置或便于拆卸的綁帶;
10、所述基座通過第二連接組件安裝于用戶的手背,所述第二連接組件也為易撕的粘接裝置或便于拆卸的綁帶。
11、優選地,所述基座靠近手背的一面設有柔軟的保護層。
12、第二方面,本發明還提供了一種手部外骨骼系統,包括信號采集模塊、信號處理模塊、運動執行模塊和人機交互模塊;
13、所述人機交互模塊,用于:在用戶進行運動想象任務時,向所述信號采集模塊發送采集指令;
14、所述信號采集模塊,用于:在接收所述采集指令后,采集所述用戶在進行運動想象任務時大腦皮層的目標fnirs信號;
15、所述信號處理模塊,用于根據所述目標fnirs信號確定運動控制指令;
16、所述運動執行模塊,用于根據所述運動控制指令控制第一方面所述的手部外骨骼裝置執行所述運動控制指令對應的動作。
17、優選地,所述手部外骨骼系統包括在線控制子模塊;所述在線控制子模塊,用于:
18、對所述目標fnirs信號進行預處理,得到目標時序信號;目標時序信號包括氧合血紅蛋白的時序信號和脫氧血紅蛋白的時序信號;
19、對所述目標時序信號進行特征提取,得到目標神經信號特征;
20、將所述目標神經信號特征輸入至訓練好的運動意圖識別模型中,得到運動意圖識別結果;
21、將所述運動意圖識別結果轉化為運動控制指令,并將所述運動控制指令發送至所述運動執行模塊。
22、優選地,所述手部外骨骼系統還包括離線訓練子模塊;所述離線訓練子模塊,用于:
23、獲取樣本數據集;所述樣本數據集包括若干樣本fnirs信號以及每一所述樣本fnirs信號對應的動作標簽;
24、對所述樣本fnirs信號進行預處理,得到樣本時序信號;所述樣本時序信號包括氧合血紅蛋白的時序信號和脫氧血紅蛋白的時序信號;
25、對所述樣本時序信號進行特征提取,得到樣本神經信號特征;
26、采用所述樣本神經信號特征和樣本神經信號特征對應的動作標簽,對運動意圖識別模型進行訓練,得到訓練好的運動意圖識別模型。
27、第三方面,本發明還提供了一種第二方面所述手部外骨骼系統的控制方法,所述控制方法包括:
28、獲取樣本數據集;所述樣本數據集包括若干樣本fnirs信號以及每一所述樣本fnirs信號對應的動作標簽;
29、采用所述樣本數據集對運動意圖識別模型進行訓練,得到訓練好的運動意圖識別模型;
30、采集所述用戶在運動想象時大腦皮層的目標fnirs信號;
31、根據所述目標fnirs信號確定運動控制指令;
32、根據所述運動控制指令控制第一方面所述的手部外骨骼裝置執行所述運動控制指令對應的動作。
33、本發明相對于現有技術取得了以下有益效果:
34、1、本發明通過設置外骨骼和嵌入式控制組件,外骨骼包括連桿機構、直線驅動組件和基座,直線驅動組件與嵌入式控制組件信號連接,嵌入式控制組件還與用于采集用戶大腦信號的信號采集裝置信號連接,直線驅動組件安裝于基座,并與連桿機構的一端鉸接,連桿機構的中部與基座鉸接,連桿機構遠離直線驅動組件的末端安裝于手指,基座安裝于手背的方式;使得嵌入式控制組件能夠根據采集到的大腦信號控制直線驅動組件的伸縮端運動,進而控制連桿機構運動,且在連桿機構的帶動下使得手指進行屈伸運動,便于幫助用戶進行自主康復訓練。
35、本發明的其他技術方案相對于現有技術取得了以下有益效果:
36、2、本發明采用功能近紅外光譜成像(functional?near-infrared?spectroscopy,fnirs)獲取用戶在進行運動想象任務時大腦皮層的fnirs信號,功能近紅外光譜成像是一種無創光學腦成像技術,其利用血液主要成分對600~900nm近紅外光具有良好散射性的特性,通過測量大腦皮層組織中氧合血紅蛋白(oxy-hemoglobin,hbo)和脫氧血紅蛋白(deoxy-hemoglobin,hbr)的濃度變化反映腦功能激活情況。相較于采集eeg信號需要涂抹生理鹽水或導電膏而言,fnirs信號采集方便,不易受到用戶肢體和頭部運動干擾。基于fnirs的腦機接口技術結合輕量化的手部外骨骼裝置,使得用戶可以通過運動想象(motorimagery,mi)方式控制手部外骨骼裝置的方式主動參與到康復過程中,有助于大腦運動神經環路的重建與康復,提升手部運動功能的康復效果,為手部運動障礙患者提供更加主動、方便的康復訓練方案。
- 還沒有人留言評論。精彩留言會獲得點贊!