大跨度橋梁主梁超低頻渦激振動的機械阻尼控制裝置
本發明屬于橋梁結構渦激振動控制領域,具體涉及一種大跨度橋梁主梁超低頻渦激振動的機械阻尼控制裝置。
背景技術:
1、因超大跨度橋梁的模態密集,常遇風速下渦振潛在發生模態更多,其渦振風險也更高。因此,對大跨度橋梁主梁在服役期間的渦激振動進行控制具有重要意義。針對目前已公開的研究成果,大跨度橋梁主梁渦激振動的控制方法主要包括兩類方法,一類方法是氣動控制措施,可直接降低作用于結構的力。如:在主梁截面兩端安裝風嘴、導流板以及附屬裝置調位等。另一種方法是機械阻尼控制措施,目前在橋梁中廣泛應用的是調諧質量阻尼器(tmd)。tmd由一個質量塊、彈簧和液體粘滯阻尼器組成,通過將tmd的頻率調諧至渦激振動頻率附近可與主梁發生共振,再通過阻尼器將共振吸收的能量進行耗散。雖然tmd具有較好的控制效果,但對于超大跨度橋梁往往采用箱梁作為主梁且發生超低頻渦激振動,tmd的調諧頻率過小導致其靜伸長量很大,設備安裝極為不便和復雜。因此,有必要提供一種新型的基于連桿機構的雙向調諧質量阻尼器裝置解決上述技術問題。
技術實現思路
1、基于以上不足之處,本發明的目的在于提供一種大跨度橋梁主梁超低頻渦激振動的機械阻尼控制裝置,可以顯著減小低頻豎向減振調諧質量阻尼器的彈簧靜伸長量,克服現有低頻豎向減振調諧質量阻尼器占用空間大、安裝成本高的缺點,同時避免因彈簧較大靜伸長量引起的性能退化問題。
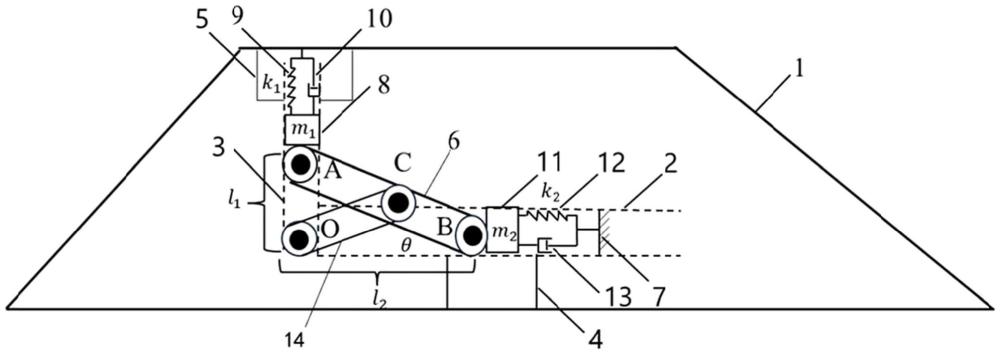
2、本發明采用的技術方案如下:一種大跨度橋梁主梁超低頻渦激振動的機械阻尼控制裝置,包括水平導軌、豎向導軌、水平導軌支撐、豎向導軌支撐、第一連桿、第二連桿、豎向質量塊、豎向彈簧、豎向粘滯阻尼器、水平質量塊、水平彈簧和水平粘滯阻尼器,
3、所述的水平導軌通過水平導軌支撐水平固定于主梁箱梁內部,所述的豎向導軌支撐的上端與主梁箱梁的頂板下表面固定連接,所述的水平導軌支撐的下端與主梁箱梁的底板上表面固定連接,所述的豎向導軌通過豎向導軌支撐垂直固定于主梁箱梁內部,
4、所述的豎向彈簧、豎向粘滯阻尼器和豎向質量塊構成豎向調諧質量阻尼器,所述的豎向彈簧和豎向粘滯阻尼器并列豎向放置,所述的豎向彈簧的上端與主梁箱梁的頂板下表面固定連接,豎向彈簧的下端與豎向質量塊的上平面固定連接,豎向粘滯阻尼器的上端與主梁箱梁的頂板下表面固定連接,豎向粘滯阻尼器的下端與豎向質量塊的上平面固定連接,豎向質量塊與豎向導軌滑動連接;
5、所述的水平彈簧、水平粘滯阻尼器和水平質量塊構成水平調諧質量阻尼器,所述的水平彈簧與水平粘滯阻尼器并列水平放置,水平導軌的右端固定連接有右側擋板,所述的水平彈簧的右端與右側擋板的固定連接,水平彈簧的左端與水平質量塊的右側壁面固定連接,水平粘滯阻尼器的右端與右側擋板固定連接,水平粘滯阻尼器的左端與水平質量塊的右側壁面固定連接,水平質量塊與水平導軌滑動連接;
6、所述的水平導軌與豎向導軌相交點為o點,第一連桿的長度是第二連桿長度的兩倍;所述的豎向質量塊的下端與第一連桿的左端鉸接,該鉸點為a點,所述的水平質量塊的右端與第一連桿的右端端鉸接,該鉸點為b點,第二連桿的右端與第一連桿的中間鉸接,該鉸點為c點,第二連桿的左端在o點鉸接,aob三點構成一個直角三角形,當豎向彈簧的靜伸長量為0,此時水平彈簧為壓縮狀態;在發生渦激振動時,傳遞過來的能量通過豎向和水平調諧質量阻尼器進行耗散掉,從而實現了大跨度橋梁的渦激振動控制。
7、本發明的另一目的是提供如上所述的一種大跨度橋梁主梁超低頻渦激振動的機械阻尼控制裝置的參數優化方法,步驟如下:
8、s1:根據主梁箱梁內部構造尺寸確定該阻尼控制裝置的可安裝空間確定:豎向彈簧本身長度、豎向彈簧靜伸長量x10、豎向彈簧振動過程中最大向下行程、第一連桿的初始豎向投影長度l1,即得到該阻尼控制裝置在豎向占據最大長度的范圍;同樣確定:第一連桿初始水平投影長度l2、水平彈簧的靜壓縮量x20、水平彈簧本身長度,即得到該阻尼控制裝置在水平方向占據最大長度的范圍;
9、s2:確定了該阻尼控制裝置在豎向與水平方向上所能占據的最大長度之后,再進行約束條件的計算,根據該減振裝置的靜力平衡方程,豎向與水平彈簧的靜伸長/壓縮量滿足以下關系式:
10、m1g-k1x10=k2x20tanθ????????????(1)
11、式中,m1為豎向質量塊的質量;g為重力加速度;k1為豎向彈簧的剛度;k2為水平彈簧的剛度;θ為第一連桿與水平方向的初始夾角,
12、從式(1)得出增大水平彈簧的剛度k2減小豎向質量塊的質量m1,能夠有效減小豎向彈簧的靜伸長量x10與水平彈簧的靜壓縮量x20,豎向彈簧的靜伸長量x10與水平彈簧的靜壓縮量x20的范圍通過工程要求確定,由此得到豎向質量塊的質量m1、水平彈簧的剛度k2與第一連桿水平方向初始夾角θ的約束條件,該阻尼控制裝置的振動控制方程如式(2)-(3)所示:
13、
14、式中,m為受控結構的質量;y為受控結構的豎向位移;d為受控結構固有阻尼;k為受控結構固有剛度;θ為第一連桿與水平方向的初始夾角;d1為豎向阻尼器的阻尼系數;d2為水平阻尼器的阻尼系數;l為第一連桿的長度;fviv為渦激力;l1為第一連桿的初始豎向投影長度,l2為第一連桿初始水平投影長度;
15、s3:對振動控制方程進行求解,求解結果包括受控結構在該阻尼控制裝置控制作用下的響應時程曲線,通過對比結構在受控與無控條件下在某一渦振發生風速下的振動時程曲線,從而得到該阻尼器的振動控制效果η即減振率,
16、η=(rmss-rmst)/rmss×100%?????????(4)
17、式中,rmss為無控結構渦振穩定階段的位移均方根值;rmst為受控結構渦振穩定階段的位移均方根值;
18、s4:對該阻尼控制裝置的控制參數進行優化與設計:通過將結構的振動控制效果η作為目標函數,并設置關于豎向質量塊的質量m1、水平彈簧的剛度k2與第一連桿的初始夾角θ的約束條件,采用遺傳算法對裝置的控制參數進行全局最優值的尋找。
19、與現有技術相比,本發明具有如下的有益效果:本發明結構簡單,減振原理清晰,通過兩組連桿機構,有效地將豎向彈簧原本應該承受的重力傳遞到了水平彈簧上承載,巧妙地利用了大跨度橋梁箱梁內部寬度方向空間大的特點。通過豎向和水平的導軌機制,保證了質量塊與連桿機構在運動時運動方向的準確性以及兩質量塊之間速度傳遞的穩定性,同時還保證了整個系統的減振能力。本發明還能實現對扭轉方向上的渦激振動進行控制。
技術特征:
1.一種大跨度橋梁主梁超低頻渦激振動的機械阻尼控制裝置,包括水平導軌(2)、豎向導軌(3)、水平導軌支撐(4)、豎向導軌支撐(5)、第一連桿(6)、第二連桿(14)、豎向質量塊(8)、豎向彈簧(9)、豎向粘滯阻尼器(10)、水平質量塊(11)、水平彈簧(12)和水平粘滯阻尼器(13),其特征在于:
2.根據權利要求1所述的一種大跨度橋梁主梁超低頻渦激振動的機械阻尼控制裝置的參數優化方法,其特征在于,方法步驟如下:
技術總結
本發明涉及一種大跨度橋梁主梁超低頻渦激振動的機械阻尼控制裝置,屬于橋梁結構渦激振動控制領域。包括水平和豎向導軌、水平和豎向導軌支撐、兩組連桿、豎向和水平質量塊、豎向彈和水平彈簧、豎向和水平粘滯阻尼器,彈簧、粘滯阻尼器和質量塊構成調諧質量阻尼器,豎向質量塊的下端與第一連桿的左端鉸接,水平質量塊的右端與第一連桿的右端端鉸接,第二連桿的右端與第一連桿的中間鉸接,當豎向彈簧的靜伸長量為0,此時水平彈簧為壓縮狀態;在發生渦激振動時,傳遞過來的能量通過豎向和水平調諧質量阻尼器進行耗散掉,從而實現對渦激振動的控制。本發明可以顯著減小低頻豎向減振調諧質量阻尼器的彈簧靜伸長量,克服現有阻尼器占用空間大的缺點。
技術研發人員:陳文禮,陳怡舟
受保護的技術使用者:哈爾濱工業大學
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!