一種機器人關節及機器人的制作方法
本發明涉及機器人設備,尤其涉及一種機器人關節及機器人。
背景技術:
1、機器人是一種廣泛應用于工業領域的機器裝置,機器人關節是作為機器人的核心部件之一。
2、目前,現有的機器人關節通常采用剛性結構,機器人只能夠進行固定路徑的運動,在一些不需要高精度、不穩定的工作環境下,例如在船體上或者其它工作環境下,剛性結構的機械人關節無法有效進行處理。
3、為了解決上述技術問題,申請日為2019年04月23日,申請號為cn201910326061.x的專利申請書中公開了一種機器人柔性關節。該發明中雖然能夠解決吸收扭轉力,減少工作部分產生的扭轉力對于對機器人動力機構的傳遞,但無法解決例如在船體上工作的機器人,船體在水面產生的撥動時,機器人底座產生的不規則移動,造成機器人工作部分與工作區域間產生碰撞,容易造成機器人損壞。
技術實現思路
1、有鑒于此,本發明的目的在于提出一種機器人關節及機器人,以解決在不穩定的工作環境下,機器人關節無法消除不規則運動產生晃動,造成機器人損壞的問題。
2、基于上述目的,本發明提供了一種機器人關節,包括關節外殼,一端與機器人的主體固定連接;旋轉臺,通過轉動的方式與所述關節外殼的另一端相連接,具有沿所述關節外殼中心線方向設置的旋轉通道;旋轉驅動件,與所述旋轉臺朝向關節外殼的一端相連接;傳動機構,裝設于所述關節外殼內,具有用于動力傳動的輸入部、輸出部與沿關節外殼中心線方向設置的傳動通道,所述輸出部與旋轉驅動件驅動連接,并用于驅動所述旋轉臺旋轉;連接機構,與所述旋轉臺的另一端固定連接,具有沿所述關節外殼中心線方向設置的連接通道與一個多自由度移動的連動部,所述連動部與機器人的工作部分固定連接;所述旋轉通道、傳動通道、連接通道與關節外殼的內腔相連通。
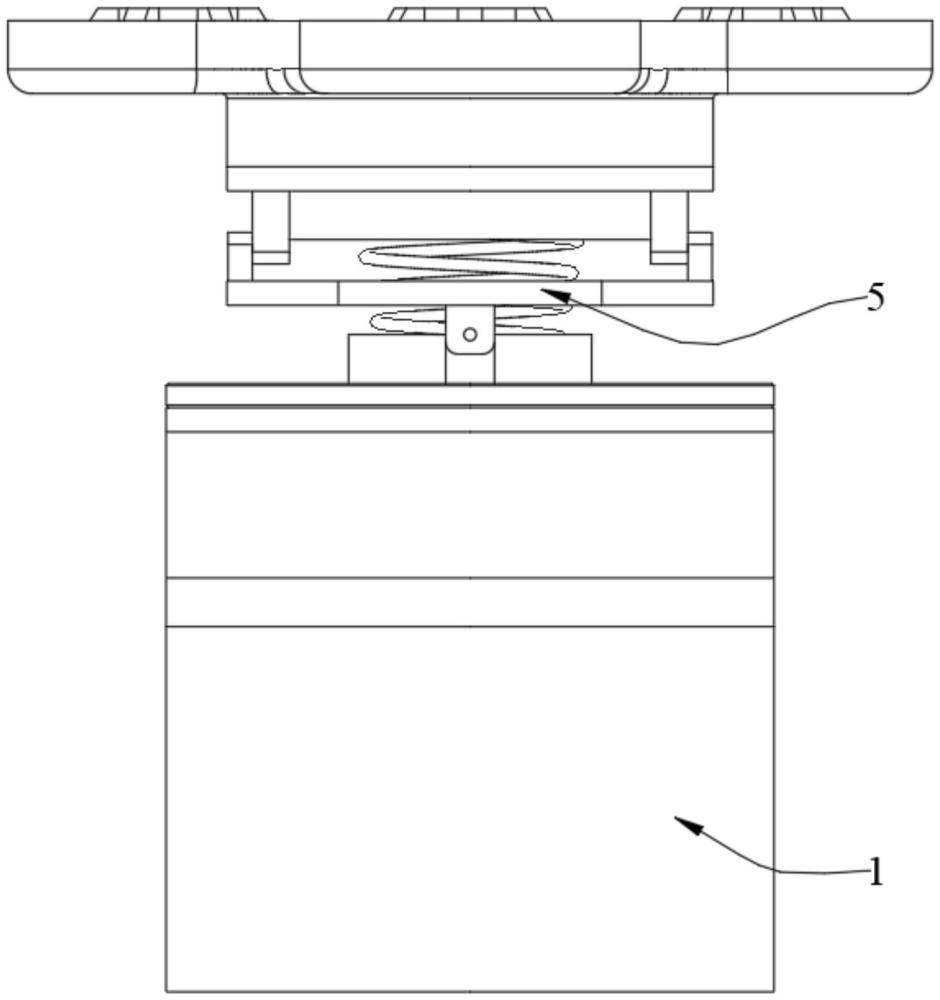
3、在一可選示例中,所述連動部包括連動支架,所述連接機構包括連接支架、連動彈簧與中間支架,所述旋轉臺朝向靠近中間支架的一端固定有垂直于關節外殼中心線方向的第一轉動軸,所述中間支架通過轉動的方式與第一轉動軸套裝連接,所述中間支架朝向遠離旋轉臺的一端固定有垂直于關節外殼中心線方向的第二轉動軸,所述連接支架通過轉動的方式與第二轉動軸套裝連接,所述第一轉動軸與第二轉動軸的中心線方向相垂直,所述中間支架設置有沿關節外殼中心線方向貫穿中間支架的中間通槽,所述連動彈簧穿過中間通槽,所述連接支架朝向靠近中間支架的一端開設有連接凹槽,所述連接凹槽內開設有貫穿連接支架的連接通槽,所述旋轉臺朝向靠近中間支架的一端開設有第一旋轉凹槽,所述第一旋轉凹槽內開設有貫穿旋轉臺的旋轉通槽,所述連動彈簧的一端插接固定于第一旋轉凹槽內,所述連動彈簧的另一端插接固定于連接凹槽內,所述連動支架與連接支架相連接。
4、在一可選示例中,所述連動支架朝向遠離中間支架的一端固定有若干個支撐單元,所述支撐單元包括彈性支撐架,所述彈性支撐架與機器人的工作部分固定連接,所述連動支架朝向遠離中間支架的一端設置有連動安裝槽,所述彈性支撐架插接于連動安裝槽內,所述連動安裝槽內通過螺紋安裝的方式安裝有鎖定環,所述鎖定環的下端與彈性支撐架相抵觸,并將所述彈性支撐架固定于連動安裝槽內,所述連動支架的中部開設有貫穿連動支架的安裝通槽,所述安裝通槽內通過轉動連接的方式安裝有管路安裝環,所述中間通槽、連接通槽、安裝通槽與管路安裝環組合形成連接通道。
5、在一可選示例中,所述旋轉驅動件包括環形驅動支架,所述環形驅動支架的外壁上設置有若干個驅動凹槽,所述驅動凹槽內均插接固定有驅動彈簧,所述環形驅動支架的內壁上開設有與傳動機構驅動連接的若干個齒輪槽,所述旋轉臺朝向關節外殼的一端設置有第二旋轉凹槽,所述環形驅動支架通過轉動的方式裝設于第二旋轉凹槽內,所述第二旋轉凹槽朝向關節外殼的一端設置有驅動凸塊,所述驅動彈簧的一端與驅動凹槽相抵觸,所述驅動彈簧的另一端與驅動凸塊相抵觸,所述旋轉通槽的另一端貫穿第二旋轉凹槽,并形成旋轉通道。
6、在一可選示例中,所述第二旋轉凹槽內還固定有環形固定架,所述環形固定架與第二旋轉凹槽的底部相抵觸,所述環形固定架的內壁設置有若干個導向凸緣,所述導向凸緣上設置有限位凸緣,所述導向凸緣朝向靠近連接機構的一端與環形驅動支架的外壁相匹配,并使所述環形驅動支架能夠沿關節外殼中心線的方向旋轉,所述限位凸緣與環形驅動支架遠離連接機構的一端相匹配。
7、在一可選示例中,所述環形驅動支架包括環形架體與固定圈,所述環形架體的外壁上設置有向外延伸的若干個延伸凸緣,所述驅動凹槽開設于延伸凸緣上,所述驅動凹槽朝向靠近連接機構的一端面積小于朝向遠離連接機構的一端面積,使所述驅動凹槽形成錐度,所述固定圈固定于朝向遠離連接機構的一端,所述固定圈的外壁上設置有與延伸凸緣相匹配的延伸圈。
8、在一可選示例中,所述關節外殼包括依次連接的端蓋環、殼體一、殼體二與殼體三,所述殼體一朝向連接機構的一端開設有第一殼體凹槽,所述第一殼體凹槽的內壁插接固定有第一軸承,所述旋轉臺穿過端蓋環,并插接固定于所述第一軸承的內壁,所述第一殼體凹槽內開設有貫穿的第一殼體通槽,所述殼體二上開設有貫穿殼體二的第二殼體通槽。
9、在一可選示例中,所述輸入部包括沿關節外殼中心線方向通過轉動連接的方式與殼體三相連接的輸入軸,所述輸入軸的外壁上固定有輸入齒輪,所述輸出部包括與殼體三固定連接的輸出支架,所述輸出支架上以關節外殼中心線為中心呈扇形設置有若干根輸出軸,所述輸出軸的外壁上通過轉動連接的方式安裝有輸出齒輪,所述傳動機構包括中心齒環、驅動齒環與傳動支架,所述傳動支架沿關節外殼中心線方向通過轉動連接的方式與輸出支架相連接,所述傳動支架的一端與中心齒環固定連接,所述傳動支架的另一端與驅動齒環固定連接,所述輸出齒輪與中心齒環、齒輪槽相嚙合,所述驅動齒環與輸入齒輪相嚙合,所述傳動支架上具有沿關節外殼中心線方向貫穿的傳動通槽,所述傳動通槽、中心齒環的內壁與驅動齒環的內壁組合形成傳動通道。
10、在一可選示例中,所述輸出支架包括相互固定的輸出環體一與輸出環體二,所述輸出環體一的外壁上設置有朝向外側延伸的延伸支耳,所述延伸支耳與限位凸緣相抵觸,所述延伸支耳上開設有貫穿的安裝孔,所述輸出環體一的內壁插接固定有第二軸承,所述傳動支架插接于第二軸承內,所述輸出環體二與殼體三固定連接,所述輸出環體二朝向輸出環體一的一端設置有延伸部,所述延伸部插接固定于輸出環體一內。
11、一種機器人,包括上述任一種機器人關節。
12、本發明的有益效果:通過增加連接機構,使機器人的工作部分能夠產生隨動,避免在不穩定的工作環境下,機器人工作部分產生的振動與移動傳遞給機器人整體,對機器人的其它結構產生沖擊,造成機器人的其它結構損壞,例如傳動機構損壞或者傳感器位移等事故,提高了機器人的使用壽命。
技術特征:
1.一種機器人關節,其特征在于,包括:
2.根據權利要求1所述的機器人關節,其特征在于,所述連動部(502)包括連動支架(52),所述連接機構(5)包括連接支架(51)、連動彈簧(53)與中間支架(54),所述旋轉臺(2)朝向靠近中間支架(54)的一端固定有垂直于關節外殼(1)中心線方向的第一轉動軸(21),所述中間支架(54)通過轉動的方式與第一轉動軸(21)套裝連接,所述中間支架(54)朝向遠離旋轉臺(2)的一端固定有垂直于關節外殼(1)中心線方向的第二轉動軸(541),所述連接支架(51)通過轉動的方式與第二轉動軸(541)套裝連接,所述第一轉動軸(21)與第二轉動軸(541)的中心線方向相垂直,所述中間支架(54)設置有沿關節外殼(1)中心線方向貫穿中間支架(54)的中間通槽(542),所述連動彈簧(53)穿過中間通槽(542),所述連接支架(51)朝向靠近中間支架(54)的一端開設有連接凹槽(511),所述連接凹槽(511)內開設有貫穿連接支架(51)的連接通槽(512),所述旋轉臺(2)朝向靠近中間支架(54)的一端開設有第一旋轉凹槽(22),所述第一旋轉凹槽(22)內開設有貫穿旋轉臺(2)的旋轉通槽(221),所述連動彈簧(53)的一端插接固定于第一旋轉凹槽(22)內,所述連動彈簧(53)的另一端插接固定于連接凹槽(511)內,所述連動支架(52)與連接支架(51)相連接。
3.根據權利要求2所述的機器人關節,其特征在于,所述連動支架(52)朝向遠離中間支架(54)的一端固定有若干個支撐單元(55),所述支撐單元(55)包括彈性支撐架(551),所述彈性支撐架(551)與機器人的工作部分固定連接,所述連動支架(52)朝向遠離中間支架(54)的一端設置有連動安裝槽(521),所述彈性支撐架(551)插接于連動安裝槽(521)內,所述連動安裝槽(521)內通過螺紋安裝的方式安裝有鎖定環(552),所述鎖定環(552)的下端與彈性支撐架(551)相抵觸,并將所述彈性支撐架(551)固定于連動安裝槽(521)內,所述連動支架(52)的中部開設有貫穿連動支架(52)的安裝通槽(522),所述安裝通槽(522)內通過轉動連接的方式安裝有管路安裝環(56),所述中間通槽(542)、連接通槽(512)、安裝通槽(522)與管路安裝環(56)組合形成連接通道(501)。
4.根據權利要求2所述的機器人關節,其特征在于,所述旋轉驅動件(3)包括環形驅動支架(31),所述環形驅動支架(31)的外壁上設置有若干個驅動凹槽(311),所述驅動凹槽(311)內均插接固定有驅動彈簧(32),所述環形驅動支架(31)的內壁上開設有與傳動機構(4)驅動連接的若干個齒輪槽(312),所述旋轉臺(2)朝向關節外殼(1)的一端設置有第二旋轉凹槽(23),所述環形驅動支架(31)通過轉動的方式裝設于第二旋轉凹槽(23)內,所述第二旋轉凹槽(23)朝向關節外殼(1)的一端設置有驅動凸塊(231),所述驅動彈簧(32)的一端與驅動凹槽(311)相抵觸,所述驅動彈簧(32)的另一端與驅動凸塊(231)相抵觸,所述旋轉通槽(221)的另一端貫穿第二旋轉凹槽(23),并形成旋轉通道(201)。
5.根據權利要求4所述的機器人關節,其特征在于,所述第二旋轉凹槽(23)內還固定有環形固定架(24),所述環形固定架(24)與第二旋轉凹槽(23)的底部相抵觸,所述環形固定架(24)的內壁設置有若干個導向凸緣(241),所述導向凸緣(241)上設置有限位凸緣(242),所述導向凸緣(241)朝向靠近連接機構(5)的一端與環形驅動支架(31)的外壁相匹配,并使所述環形驅動支架(31)能夠沿關節外殼(1)中心線的方向旋轉,所述限位凸緣(242)與環形驅動支架(31)遠離連接機構(5)的一端相匹配。
6.根據權利要求5所述的機器人關節,其特征在于,所述環形驅動支架(31)包括環形架體(3101)與固定圈(3102),所述環形架體(3101)的外壁上設置有向外延伸的若干個延伸凸緣(31011),所述驅動凹槽(311)開設于延伸凸緣(31011)上,所述驅動凹槽(311)朝向靠近連接機構(5)的一端面積小于朝向遠離連接機構(5)的一端面積,使所述驅動凹槽(311)形成錐度,所述固定圈(3102)固定于朝向遠離連接機構(5)的一端,所述固定圈(3102)的外壁上設置有與延伸凸緣(31011)相匹配的延伸圈(31021)。
7.根據權利要求6所述的機器人關節,其特征在于,所述關節外殼(1)包括依次連接的端蓋環(11)、殼體一(12)、殼體二(13)與殼體三(14),所述殼體一(12)朝向連接機構(5)的一端開設有第一殼體凹槽(121),所述第一殼體凹槽(121)的內壁插接固定有第一軸承(15),所述旋轉臺(2)穿過端蓋環(11),并插接固定于所述第一軸承(15)的內壁,所述第一殼體凹槽(121)內開設有貫穿的第一殼體通槽(122),所述殼體二(13)上開設有貫穿殼體二(13)的第二殼體通槽(131)。
8.根據權利要求7所述的機器人關節,其特征在于,所述輸入部(401)包括沿關節外殼(1)中心線方向通過轉動連接的方式與殼體三(14)相連接的輸入軸(41),所述輸入軸(41)的外壁上固定有輸入齒輪(42),所述輸出部(402)包括與殼體三(14)固定連接的輸出支架(43),所述輸出支架(43)上以關節外殼(1)中心線為中心呈扇形設置有若干根輸出軸(44),所述輸出軸(44)的外壁上通過轉動連接的方式安裝有輸出齒輪(45),所述傳動機構(4)包括中心齒環(46)、驅動齒環(47)與傳動支架(48),所述傳動支架(48)沿關節外殼(1)中心線方向通過轉動連接的方式與輸出支架(43)相連接,所述傳動支架(48)的一端與中心齒環(46)固定連接,所述傳動支架(48)的另一端與驅動齒環(47)固定連接,所述輸出齒輪(45)與中心齒環(46)、齒輪槽(312)相嚙合,所述驅動齒環(47)與輸入齒輪(42)相嚙合,所述傳動支架(48)上具有沿關節外殼(1)中心線方向貫穿的傳動通槽(481),所述傳動通槽(481)、中心齒環(46)的內壁與驅動齒環(47)的內壁組合形成傳動通道(403)。
9.根據權利要求8所述的機器人關節,其特征在于,所述輸出支架(43)包括相互固定的輸出環體一(431)與輸出環體二(432),所述輸出環體一(431)的外壁上設置有朝向外側延伸的延伸支耳(4311),所述延伸支耳(4311)與限位凸緣(242)相抵觸,所述延伸支耳(4311)上開設有貫穿的安裝孔(4312),所述輸出環體一(431)的內壁插接固定有第二軸承(49),所述傳動支架(48)插接于第二軸承(49)內,所述輸出環體二(432)與殼體三(14)固定連接,所述輸出環體二(432)朝向輸出環體一(431)的一端設置有延伸部,所述延伸部插接固定于輸出環體一(431)內。
10.一種機器人,包括如權利要求1至9任一項所述的機器人關節。
技術總結
本發明涉及機器人技術領域,具體涉及一種機器人關節及機器人,包括關節外殼、旋轉臺、旋轉驅動件、傳動機構與連接機構,所述關節外殼一端與機器人的主體固定連接,旋轉臺通過轉動的方式與關節外殼的另一端相連接,旋轉驅動件與旋轉臺朝向關節外殼的一端相連接,傳動機構裝設于關節外殼內,具有輸入部、輸出部與傳動通道。本發明通過增加連接機構,使機器人的工作部分能夠產生隨動,避免在不穩定的工作環境下,對機器人的其它結構產生沖擊,造成機器人的其它結構損壞,提高了機器人的使用壽命。
技術研發人員:張為臣,李永,解建員,張為君,鈕玲玲
受保護的技術使用者:安徽清智云楚智能裝備有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!