一種電動汽車換擋工況電機扭矩控制方法、裝置及車輛與流程
【】本申請實施例涉及新能源汽車,尤其涉及一種電動汽車換擋工況電機扭矩控制方法、裝置及車輛。
背景技術
0、
背景技術:
1、目前,電動汽車的電機按照轉矩、轉速工況可分成四象限,第一象限為正轉速、正轉矩,第二象限為負轉速、正扭矩,第三象限為負轉速、負轉矩,第四象限為正轉速、負轉矩;電動汽車在正常行駛過程中電機只會在相鄰兩個狀態(tài)間切換。
2、然而,當電動汽車在換擋過程中,擋位快速切換可能會引起車輛異常,例如駕駛員在移庫過程中快速進行d到r或者r到d擋切換,電機扭矩及轉速方向均會發(fā)生轉換,可能會引起電機扭矩階躍,導致整車異響竄動,甚至引發(fā)交通事故,存在較大的安全隱患。
3、因而,針對上述問題,如何采取相應措施以防止快速換擋后發(fā)生電機扭矩階躍是亟需解決的問題。
技術實現(xiàn)思路
0、
技術實現(xiàn)要素:
1、本申請實施例提出了一種電動汽車換擋工況電機扭矩控制方法、裝置及車輛,涉及新能源汽車技術領域,能夠……。
2、第一方面,本申請實施例提供了一種電動汽車換擋工況電機扭矩控制方法,所述方法包括:
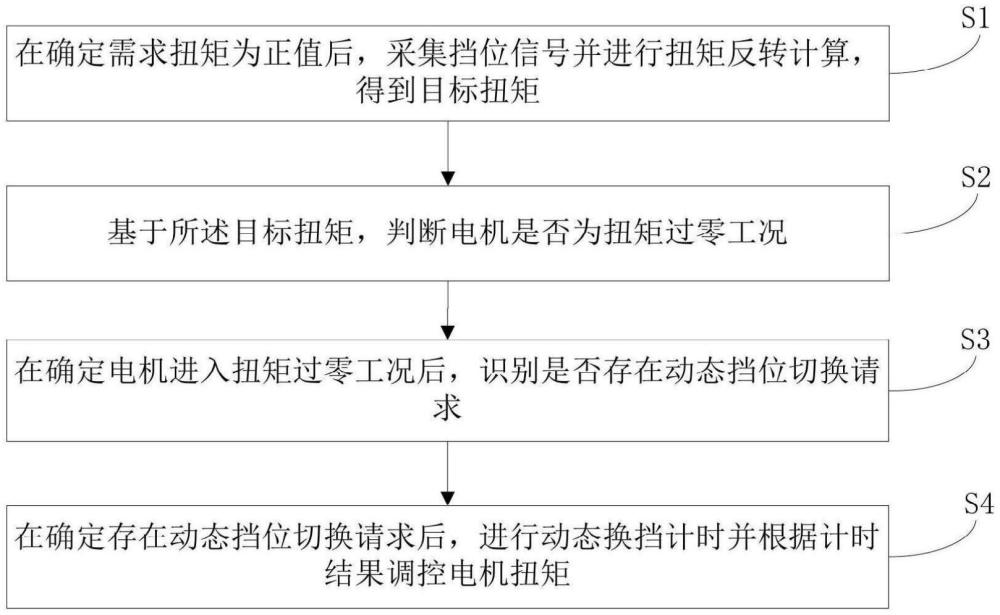
3、在確定需求扭矩為正值后,采集擋位信號并進行扭矩反轉計算,得到目標扭矩;
4、基于所述目標扭矩,判斷電機是否為扭矩過零工況;
5、在確定電機進入扭矩過零工況后,識別是否存在動態(tài)擋位切換請求;
6、在確定存在動態(tài)擋位切換請求后,進行動態(tài)換擋計時并根據(jù)計時結果調(diào)控電機扭矩。
7、在其中至少一種可能的實現(xiàn)方式中,所述判斷電機是否為扭矩過零工況包括:
8、若所述目標扭矩的絕對值處于預設的扭矩范圍內(nèi),則確定進入扭矩過零工況;
9、若所述目標扭矩的絕對值處于所述扭矩范圍之外,則確定為非過零工況,并按照第一扭矩斜率執(zhí)行所述目標扭矩。
10、在其中至少一種可能的實現(xiàn)方式中,所述識別是否存在動態(tài)擋位切換請求包括:
11、若在相鄰時刻檢出前進擋與倒車擋發(fā)生切換,則確定進入動態(tài)換擋工況;
12、否則,按照預設的第二扭矩斜率進行目標扭矩調(diào)控,所述第二扭矩斜率小于第一扭矩斜率。
13、在其中至少一種可能的實現(xiàn)方式中,所述進行動態(tài)換擋計時并根據(jù)計時結果調(diào)控電機扭矩包括:
14、在識別到當前處于過零工況且存在動態(tài)換擋請求時,則開始動態(tài)換擋持續(xù)時間計時;
15、若動態(tài)換擋持續(xù)時間小于等于預設的延時時間,則按照預設的第三扭矩斜率進行所述目標扭矩調(diào)控,所述第三扭矩斜率小于所述第二扭矩斜率;
16、若動態(tài)換擋持續(xù)時間大于所述延時時間,則按照所述第二扭矩斜率進行扭矩控制。
17、在其中至少一種可能的實現(xiàn)方式中,所述扭矩反轉計算包括:若當前擋位信號為倒車擋,則將所述需求扭矩取負值,得到所述目標扭矩;若當前擋位信號為前進擋,則將所述需求扭矩取正值,得到所述目標扭矩。
18、在其中至少一種可能的實現(xiàn)方式中,在計算目標扭矩之前進行車輛運行狀態(tài)條件判,至少包括:當前擋位為前進擋、且電機轉速大于預設的第一轉速閾值、且當前車速小于預設的第一車速閾值;或者,當前擋位為倒車擋、且電機轉速小于預設的第二轉速閾值、且當前車速小于預設的第二車速閾值。
19、該方案所具有的技術作用可以參考如下:本申請實施例可以根據(jù)車輛運行狀態(tài)、需求扭矩以及擋位信號來區(qū)分車輛過零扭矩區(qū)間,對傳動系統(tǒng)反轉和正常動力輸出狀態(tài)進行區(qū)分,實現(xiàn)不同功能需求時的扭矩響應,有效避免動力響應慢、換擋時間長的問題;并且針對前進擋與倒車擋之間的快速切換工況,精準識別動態(tài)換擋工況的特定扭矩需求,避免扭矩發(fā)生階躍現(xiàn)象,確保車輛行駛穩(wěn)定且安全;此外引入了計時機制,通過對動態(tài)換擋扭矩作用時間進行合理標定,調(diào)控動態(tài)換擋過程中的扭矩斜率,避免了動態(tài)換擋扭矩長時間作用導致車輛無法降速的問題。
20、第二方面,本申請實施例提供了一種電動汽車換擋工況電機扭矩控制裝置,所述裝置包括:
21、扭矩反轉計算模塊,用于在確定需求扭矩為正值后,采集擋位信號并進行扭矩反轉計算,得到目標扭矩;
22、過零工況識別模塊,用于基于所述目標扭矩,判斷電機是否為扭矩過零工況;
23、動態(tài)換擋識別模塊,用于在確定電機進入扭矩過零工況后,識別是否存在動態(tài)擋位切換請求;
24、換擋計時調(diào)控模塊,用于在確定存在動態(tài)擋位切換請求后,進行動態(tài)換擋計時并根據(jù)計時結果調(diào)控電機扭矩。
25、第三方面,本申請實施例提供了一種電子設備,其中包括:一個或多個處理器、存儲器以及一個或多個計算機程序,所述存儲器可以采用非易失性存儲介質(zhì),其中所述一個或多個計算機程序被存儲在所述存儲器中,所述一個或多個計算機程序包括指令,當所述指令被所述設備執(zhí)行時,使得所述電子設備執(zhí)行如第一方面或者第一方面的任一可能實現(xiàn)方式中的所述方法。
26、第四方面,本申請實施例提供了一種計算機可讀存儲介質(zhì),該計算機可讀存儲介質(zhì)中存儲有計算機程序,當其在計算機上運行時,使得計算機執(zhí)行如第一方面或者第一方面的任一可能實現(xiàn)方式中的所述方法。
27、第五方面,本申請實施例提供了一種車輛,所述車輛包括第三方面實施例中的電子設備,以及第四方面實施例中的計算機可讀存儲介質(zhì)。
28、應當理解的是,本申請實施例的第二~五方面與本申請實施例的第一方面的技術方案一致,各方面及對應的可行實施方式所取得的有益效果相似,不再贅述。
技術特征:
1.一種電動汽車換擋工況電機扭矩控制方法,其特征在于,所述方法包括:
2.根據(jù)權利要求1所述的電動汽車換擋工況電機扭矩控制方法,其特征在于,所述判斷電機是否為扭矩過零工況包括:
3.根據(jù)權利要求2所述的電動汽車換擋工況電機扭矩控制方法,其特征在于,所述識別是否存在動態(tài)擋位切換請求包括:
4.根據(jù)權利要求3所述的電動汽車換擋工況電機扭矩控制方法,其特征在于,所述進行動態(tài)換擋計時并根據(jù)計時結果調(diào)控電機扭矩包括:
5.根據(jù)權利要求1所述的電動汽車換擋工況電機扭矩控制方法,其特征在于,所述扭矩反轉計算包括:若當前擋位信號為倒車擋,則將所述需求扭矩取負值,得到所述目標扭矩;若當前擋位信號為前進擋,則將所述需求扭矩取正值,得到所述目標扭矩。
6.根據(jù)權利要求1~5任一項所述的電動汽車換擋工況電機扭矩控制方法,其特征在于,在計算目標扭矩之前進行車輛運行狀態(tài)條件判,至少包括:當前擋位為前進擋、且電機轉速大于預設的第一轉速閾值、且當前車速小于預設的第一車速閾值;或者,當前擋位為倒車擋、且電機轉速小于預設的第二轉速閾值、且當前車速小于預設的第二車速閾值。
7.一種電動汽車換擋工況電機扭矩控制裝置,其特征在于,所述裝置包括:
8.一種電子設備,其特征在于,包括:
9.一種計算機可讀存儲介質(zhì),其上存儲有計算機程序,其特征在于,該計算機程序被處理器執(zhí)行時實現(xiàn)權利要求1~6任一項所述的電動汽車換擋工況電機扭矩控制方法。
10.一種車輛,其特征在于,所述車輛配置有權利要求8所述的電子設備或權利要求9所述的計算機可讀存儲介質(zhì)。
技術總結
本申請實施例提出了一種電動汽車換擋工況電機扭矩控制方法、裝置及車輛,涉及新能源汽車技術領域,可以根據(jù)車輛運行狀態(tài)、需求扭矩以及擋位信號來區(qū)分車輛過零扭矩區(qū)間,對傳動系統(tǒng)反轉和正常動力輸出狀態(tài)進行區(qū)分,實現(xiàn)不同功能需求時的扭矩響應,有效避免動力響應慢、換擋時間長的問題;并且針對前進擋與倒車擋之間的快速切換工況,精準識別動態(tài)換擋工況的特定扭矩需求,避免扭矩發(fā)生階躍現(xiàn)象,確保車輛行駛穩(wěn)定且安全;此外引入了計時機制,通過對動態(tài)換擋扭矩作用時間進行合理標定,調(diào)控動態(tài)換擋過程中的扭矩斜率,避免了動態(tài)換擋扭矩長時間作用導致車輛無法降速的問題。
技術研發(fā)人員:胡強,王毅,任強,李瑞珂,陳程,李翔
受保護的技術使用者:上汽通用五菱汽車股份有限公司
技術研發(fā)日:
技術公布日:2025/3/16
- 還沒有人留言評論。精彩留言會獲得點贊!