底盤控制方法、裝置、電子設備及計算機可讀存儲介質與流程
本申請涉及電子設備,特別是涉及一種底盤控制方法、裝置、電子設備及計算機可讀存儲介質。
背景技術:
1、兩輪差速底盤能夠利用兩個驅動輪之間的轉速差實現小半徑轉彎,具有良好的靈活性。此外,兩輪差速底盤能夠利用輔助輪分擔重力,使其具有良好的負載能力和穩定性。因此,兩輪差速底盤常用于送餐機器人、掃地機器人、倉儲搬運小車、電動輪椅等電子設備中。如何實現對兩輪差速底盤的控制非常重要。
技術實現思路
1、基于此,有必要針對上述技術問題,提供一種基于驅動操作對電子設備的兩輪差速底盤進行控制的底盤控制方法、裝置、電子設備及計算機可讀存儲介質。
2、第一方面,本申請提供了一種底盤控制方法,應用于電子設備,所述電子設備包括兩輪差速底盤和兩個電機,所述兩輪差速底盤包括兩個驅動輪,所述兩個電機與所述兩個驅動輪一一對應,所述方法包括:
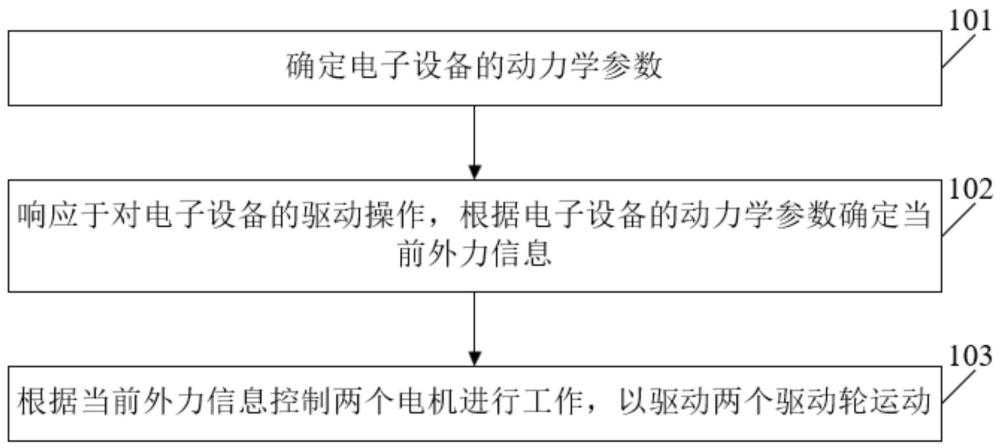
3、確定所述電子設備的動力學參數;
4、響應于對所述電子設備的驅動操作,根據所述動力學參數確定當前外力信息;
5、根據所述當前外力信息控制所述兩個電機進行工作,以驅動所述兩個驅動輪運動。
6、在其中一個實施例中,所述確定所述電子設備的動力學參數包括:
7、在所述電子設備的當前負載重量大于或等于第一閾值的情況下,使用動力學參數辨識方法,確定所述電子設備的動力學參數;
8、在所述電子設備的當前負載重量小于所述第一閾值的情況下,確定所述電子設備的動力學參數為預設動力學參數。
9、在其中一個實施例中,所述確定所述電子設備的動力學參數包括:
10、在所述電子設備的負載重量的變化量大于或等于第二閾值的情況下,使用動力學參數辨識方法,確定所述電子設備的動力學參數。
11、在其中一個實施例中,所述電子設備的動力學參數包括所述兩個驅動輪的摩擦力矩、所述電子設備的本體和負載的質量和所述電子設備的轉動慣量;
12、所述使用動力學參數辨識方法,確定所述電子設備的動力學參數包括:
13、在所述兩個驅動輪被相同力矩驅動的情況下,測量所述兩個驅動輪的第一轉速、摩擦力矩和第一力矩;
14、根據所述兩個驅動輪的質量、轉動慣量、半徑、第一轉速、摩擦力矩和第一力矩,以及所述電子設備所在位置的坡度,確定所述電子設備的本體和負載的質量;
15、在所述兩個驅動輪被相反力矩驅動的情況下,測量所述兩個驅動輪的第二轉速和第二力矩;
16、根據所述兩個驅動輪的質量、轉動慣量、半徑、第二轉速、摩擦力矩和第二力矩,以及所述電子設備的寬度,確定所述電子設備的轉動慣量。
17、在其中一個實施例中,所述根據所述動力學參數確定當前外力信息包括:
18、根據所述動力學參數,以及所述兩個驅動輪的當前轉速、當前轉動加速度和當前力矩,確定當前外力信息。
19、在其中一個實施例中,所述方法還包括:
20、對所述當前外力信息進行濾波處理,得到目標外力信息;
21、所述根據所述當前外力信息控制所述兩個電機進行工作包括:
22、根據所述目標外力信息控制所述兩個電機進行工作。
23、在其中一個實施例中,所述根據所述當前外力信息控制所述兩個電機工作,以驅動所述兩個驅動輪運動包括:
24、根據所述當前外力信息確定第一驅動輪的轉速和轉動加速度,所述第一驅動輪為所述兩個驅動輪中的任一驅動輪;
25、根據所述第一驅動輪的轉速和轉動加速度確定第一電機的力矩,所述第一電機為所述兩個電機中所述第一驅動輪對應的電機;
26、根據所述第一電機的力矩控制所述第一電機工作,以驅動所述第一驅動輪運動。
27、第二方面,本申請還提供了一種底盤控制裝置,應用于電子設備,所述電子設備包括兩輪差速底盤和兩個電機,所述兩輪差速底盤包括兩個驅動輪,所述兩個電機與所述兩個驅動輪一一對應,所述裝置包括:
28、第一確定單元,用于確定所述電子設備的動力學參數;
29、第二確定單元,用于響應于對所述電子設備的驅動操作,根據所述動力學參數確定當前外力信息;
30、控制單元,用于根據所述當前外力信息控制所述兩個電機進行工作,以驅動所述兩個驅動輪運動。
31、第三方面,本申請還提供了一種電子設備,包括存儲器和處理器,所述存儲器存儲有計算機程序,所述處理器執行所述計算機程序時實現上述方法的步驟。
32、第四方面,本申請還提供了一種電子設備,包括處理器、兩輪差速底盤和兩個電機,所述處理器分別電連接所述兩個電機,所述兩輪差速底盤包括兩個驅動輪,所述兩個電機與所述兩個驅動輪一一對應電連接;
33、所述處理器,用于確定所述電子設備的動力學參數;
34、所述處理器,還用于響應于對所述電子設備的驅動操作,根據所述動力學參數確定當前外力信息;
35、所述處理器,還用于根據所述當前外力信息生成控制指令;
36、所述兩個電機,用于根據所述控制指令進行工作,以驅動所述兩個驅動輪運動。
37、第五方面,本申請還提供了一種計算機可讀存儲介質,其上存儲有計算機程序,所述計算機程序被處理器執行時實現上述方法的步驟。
38、第六方面,本申請還提供了一種計算機程序產品,包括計算機程序,該計算機程序被處理器執行時實現上述方法的步驟。
39、本申請實施例中,電子設備包括兩輪差速底盤和兩個電機,兩輪差速底盤包括兩個驅動輪,兩個電機與兩個驅動輪一一對應;確定電子設備的動力學參數,響應于對電子設備的驅動操作,根據動力學參數確定當前外力信息,根據當前外力信息控制兩個電機進行工作,以驅動兩個驅動輪運動。可見,電子設備基于驅動力運動,在存在對電子設備的驅動力的情況下,兩輪差速底盤可以基于驅動力進行運動,在不存在對電子設備的驅動力的情況下,兩輪差速底盤不運動,可見,可以基于對電子設備的驅動操作對兩輪差速底盤進行控制,可以保證電子設備運動的安全性。此外,由于外力信息基于電子設備的動力學參數確定,可以保證確定的動力學參數的準確性,進而可以基于確定的外力信息對兩輪差速底盤進行準確控制,可以實現對兩輪差速底盤的柔性控制。進一步地,由于外力信息基于電子設備的動力學參數確定,因此,不需要專門檢測外力的傳感器,可以減少電子設備中傳感器的數量,從而可以降低電子設備的成本和復雜度。
技術特征:
1.一種底盤控制方法,其特征在于,應用于電子設備,所述電子設備包括兩輪差速底盤和兩個電機,所述兩輪差速底盤包括兩個驅動輪,所述兩個電機與所述兩個驅動輪一一對應,所述方法包括:
2.根據權利要求1所述的方法,其特征在于,所述確定所述電子設備的動力學參數包括:
3.根據權利要求1所述的方法,其特征在于,所述確定所述電子設備的動力學參數包括:
4.根據權利要求2或3所述的方法,其特征在于,所述電子設備的動力學參數包括所述兩個驅動輪的摩擦力矩、所述電子設備的本體和負載的質量和所述電子設備的轉動慣量;
5.根據權利要求1所述的方法,其特征在于,所述根據所述動力學參數確定當前外力信息包括:
6.根據權利要求1所述的方法,其特征在于,所述方法還包括:
7.根據權利要求1所述的方法,其特征在于,所述根據所述當前外力信息控制所述兩個電機工作,以驅動所述兩個驅動輪運動包括:
8.一種底盤控制裝置,其特征在于,應用于電子設備,所述電子設備包括兩輪差速底盤和兩個電機,所述兩輪差速底盤包括兩個驅動輪,所述兩個電機與所述兩個驅動輪一一對應,所述裝置包括:
9.一種電子設備,其特征在于,包括處理器、兩輪差速底盤和兩個電機,所述處理器分別電連接所述兩個電機,所述兩輪差速底盤包括兩個驅動輪,所述兩個電機與所述兩個驅動輪一一對應電連接;
10.一種計算機可讀存儲介質,其上存儲有計算機程序,其特征在于,所述計算機程序被處理器執行時實現權利要求1至7中任一項所述的方法的步驟。
技術總結
本申請涉及一種底盤控制方法、裝置、電子設備及計算機可讀存儲介質,該方法應用于電子設備,電子設備包括兩輪差速底盤和兩個電機,兩輪差速底盤包括兩個驅動輪,兩個電機與兩個驅動輪一一對應;該方法包括:確定電子設備的動力學參數,響應于對電子設備的驅動操作,根據動力學參數確定當前外力信息,根據當前外力信息控制兩個電機進行工作,以驅動兩個驅動輪運動。采用本方法可以基于驅動操作對電子設備的兩輪差速底盤進行控制,可以保證電子設備運動的安全性,可以實現對兩輪差速底盤的柔性控制。
技術研發人員:安麗,吳周瑜,羅凌云,牟俊其,胡俊杰,鄧錦祥
受保護的技術使用者:深圳市普渡科技有限公司
技術研發日:
技術公布日:2025/3/20
- 還沒有人留言評論。精彩留言會獲得點贊!