一種基于三維柵格地圖的無(wú)人清掃車(chē)主動(dòng)安全方法及系統(tǒng)與流程
本技術(shù)涉及自動(dòng)駕駛,具體而言,涉及一種基于三維柵格地圖的無(wú)人清掃車(chē)主動(dòng)安全方法及系統(tǒng)。
背景技術(shù):
1、隨著自動(dòng)駕駛技術(shù)的不斷普及,自動(dòng)駕駛的概念已經(jīng)深入各行各業(yè),將自動(dòng)駕駛與傳統(tǒng)環(huán)衛(wèi)清掃車(chē)結(jié)合,替代傳統(tǒng)的人工駕駛,實(shí)現(xiàn)智能控制,節(jié)約了財(cái)力、物力和人力,并提高了清潔效率。其中,為實(shí)現(xiàn)清掃車(chē)的自主無(wú)人駕駛,首先需要保障清掃車(chē)和其他交通參與者的安全,研究和發(fā)展車(chē)輛的主動(dòng)安全技術(shù)具有重要意義。
2、目前,在現(xiàn)有的無(wú)人清掃車(chē)主動(dòng)安全技術(shù)中,所采用的主動(dòng)安全方法包括:使用超聲波雷達(dá),利用超聲波雷達(dá)感知無(wú)人清掃車(chē)周?chē)系K物的距離,當(dāng)障礙物距離過(guò)近時(shí),觸發(fā)清掃車(chē)的緊急制動(dòng);直接使用激光雷達(dá),利用激光雷達(dá)探測(cè)障礙物的點(diǎn)云位置信息,判斷與清掃車(chē)之間的距離,確認(rèn)是否進(jìn)行緊急制動(dòng)。其中,超聲波雷達(dá)信號(hào)傳輸頻率較低,在無(wú)人清掃車(chē)行駛過(guò)程中無(wú)法滿(mǎn)足實(shí)時(shí)檢測(cè)和接管的需求,并且超聲波反饋的一般只有和障礙物之間的距離信息,在主動(dòng)安全算法上的使用不具有靈活性。而激光雷達(dá)的感知周?chē)系K物信息的頻率雖然較高,但其數(shù)據(jù)量較大,若在車(chē)輛實(shí)時(shí)行駛過(guò)程中,直接使用激光雷達(dá)點(diǎn)云,則需要對(duì)數(shù)量龐大的點(diǎn)云信息進(jìn)行計(jì)算處理,篩選其中距離車(chē)輛較近的點(diǎn),這對(duì)算法輸出結(jié)果的實(shí)時(shí)性提出了較大挑戰(zhàn),且可能會(huì)出現(xiàn)閃現(xiàn)的點(diǎn)云噪點(diǎn),若直接使用則極易造成車(chē)輛卡頓。
技術(shù)實(shí)現(xiàn)思路
1、本技術(shù)提供一種基于三維柵格地圖的無(wú)人清掃車(chē)主動(dòng)安全方法及系統(tǒng),主要解決了無(wú)人清掃車(chē)行駛過(guò)程中的主動(dòng)安全問(wèn)題,在突然遇到障礙物時(shí)可以準(zhǔn)確識(shí)別、快速反應(yīng)、緊急制動(dòng)接管,并避免不必要的誤接管,解決了現(xiàn)有技術(shù)中使用超聲波雷達(dá)方法所存在的反應(yīng)速度慢、靈活性不足的問(wèn)題,還解決了現(xiàn)有技術(shù)中直接使用激光雷達(dá)點(diǎn)云方法的誤檢、時(shí)效性欠缺的問(wèn)題。
2、具體的技術(shù)方案如下:
3、第一方面,本技術(shù)實(shí)施例提供了一種基于三維柵格地圖的無(wú)人清掃車(chē)主動(dòng)安全方法,所述無(wú)人清掃車(chē)主動(dòng)安全方法包括:
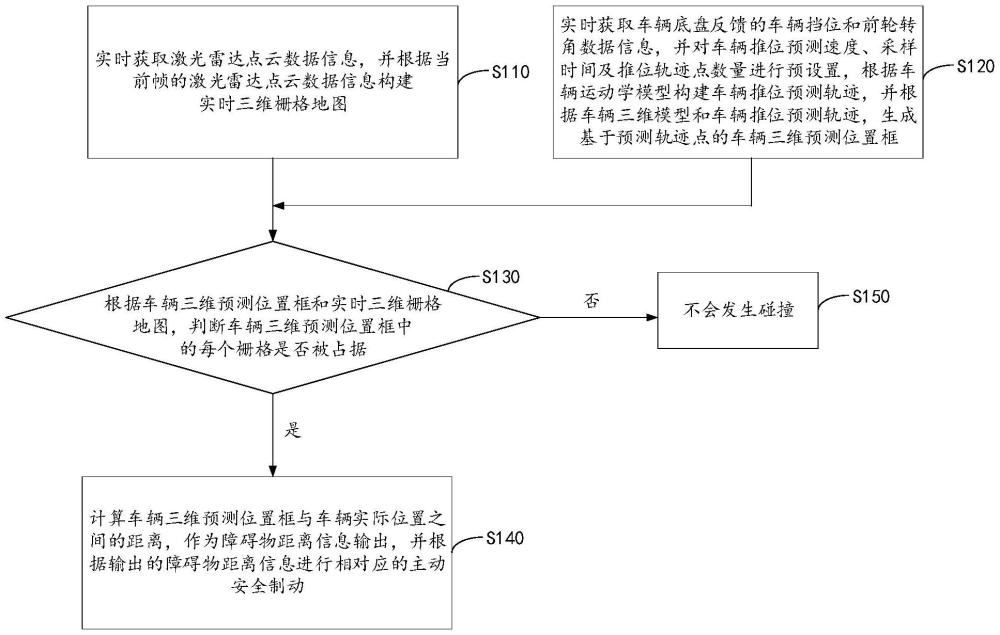
4、實(shí)時(shí)獲取激光雷達(dá)點(diǎn)云數(shù)據(jù)信息,并根據(jù)當(dāng)前幀的激光雷達(dá)點(diǎn)云數(shù)據(jù)信息構(gòu)建實(shí)時(shí)三維柵格地圖;
5、實(shí)時(shí)獲取車(chē)輛底盤(pán)反饋的車(chē)輛擋位和前輪轉(zhuǎn)角數(shù)據(jù)信息,并對(duì)車(chē)輛推位預(yù)測(cè)速度、采樣時(shí)間及推位軌跡點(diǎn)數(shù)量進(jìn)行預(yù)設(shè)置,根據(jù)車(chē)輛運(yùn)動(dòng)學(xué)模型構(gòu)建車(chē)輛推位預(yù)測(cè)軌跡,并根據(jù)車(chē)輛三維模型和所述車(chē)輛推位預(yù)測(cè)軌跡,生成基于預(yù)測(cè)軌跡點(diǎn)的車(chē)輛三維預(yù)測(cè)位置框;其中,所述車(chē)輛推位預(yù)測(cè)軌跡包括每個(gè)推位軌跡點(diǎn)的位置姿態(tài)信息;
6、根據(jù)所述車(chē)輛三維預(yù)測(cè)位置框和所述實(shí)時(shí)三維柵格地圖,判斷所述車(chē)輛三維預(yù)測(cè)位置框中的每個(gè)柵格是否被占據(jù);
7、若所述車(chē)輛三維預(yù)測(cè)位置框中的某個(gè)柵格被占據(jù),則計(jì)算所述車(chē)輛三維預(yù)測(cè)位置框與車(chē)輛實(shí)際位置之間的距離,作為障礙物距離信息輸出,并根據(jù)輸出的所述障礙物距離信息進(jìn)行相對(duì)應(yīng)的主動(dòng)安全制動(dòng)。
8、在本技術(shù)的一些實(shí)施例中,所述根據(jù)當(dāng)前幀的激光雷達(dá)點(diǎn)云數(shù)據(jù)信息構(gòu)建實(shí)時(shí)三維柵格地圖,具體包括:
9、設(shè)置所述實(shí)時(shí)三維柵格地圖的長(zhǎng)寬高和分辨率,并將所述當(dāng)前幀的激光雷達(dá)點(diǎn)云數(shù)據(jù)信息轉(zhuǎn)換為所述實(shí)時(shí)三維柵格地圖的地圖數(shù)據(jù)。
10、在本技術(shù)的一些實(shí)施例中,所述根據(jù)車(chē)輛運(yùn)動(dòng)學(xué)模型構(gòu)建車(chē)輛推位預(yù)測(cè)軌跡,具體包括:
11、建立車(chē)輛運(yùn)動(dòng)學(xué)模型;所述車(chē)輛運(yùn)動(dòng)學(xué)模型為:
12、
13、其中,為車(chē)輛在x軸的分速度,為車(chē)輛在y軸的分速度,為航向角變化率,v為車(chē)輛速度,為車(chē)輛航向角,δ為前輪轉(zhuǎn)角,l為車(chē)輛軸距;
14、根據(jù)所述車(chē)輛運(yùn)動(dòng)學(xué)模型以及預(yù)設(shè)置的所述車(chē)輛推位預(yù)測(cè)速度、所述采樣時(shí)間、所述推位軌跡點(diǎn)數(shù)量,計(jì)算得到每個(gè)所述推位軌跡點(diǎn)的位置信息和航向角信息,計(jì)算公式為:
15、
16、其中,xk+1為第k+1個(gè)軌跡點(diǎn)車(chē)輛位置x坐標(biāo),xk為第k個(gè)軌跡點(diǎn)車(chē)輛位置x坐標(biāo),yk+1為第k+1個(gè)軌跡點(diǎn)車(chē)輛位置y坐標(biāo),yk為第k個(gè)軌跡點(diǎn)車(chē)輛位置y坐標(biāo),為第k+1個(gè)軌跡點(diǎn)車(chē)輛航向角,為第k個(gè)軌跡點(diǎn)車(chē)輛航向角,v'為車(chē)輛推位預(yù)測(cè)速度,t為采樣時(shí)間,為車(chē)輛航向角,δ為前輪轉(zhuǎn)角,l為車(chē)輛軸距,n為推位軌跡點(diǎn)數(shù)量;
17、根據(jù)每個(gè)所述推位軌跡點(diǎn)的所述位置信息和所述航向角信息,構(gòu)建所述車(chē)輛推位預(yù)測(cè)軌跡。
18、在本技術(shù)的一些實(shí)施例中,所述車(chē)輛三維模型的構(gòu)建方法包括:
19、根據(jù)車(chē)輛各局部實(shí)際形狀和傳感器布局,分別選擇相對(duì)應(yīng)形狀的三維模型作為初始局部模型;
20、以車(chē)輛后軸中心為三維坐標(biāo)系原點(diǎn),根據(jù)所述車(chē)輛整體實(shí)際形狀,對(duì)所有所述初始局部模型進(jìn)行組合拼接,合成所述車(chē)輛三維模型。
21、在本技術(shù)的一些實(shí)施例中,所述根據(jù)車(chē)輛三維模型和所述車(chē)輛推位預(yù)測(cè)軌跡,生成基于預(yù)測(cè)軌跡點(diǎn)的車(chē)輛三維預(yù)測(cè)位置框,具體包括:
22、獲取每個(gè)所述推位軌跡點(diǎn)的所述位置姿態(tài)信息;所述位置姿態(tài)信息包括位置信息和航向角信息;
23、根據(jù)每個(gè)所述推位軌跡點(diǎn)的所述位置姿態(tài)信息和所述車(chē)輛三維模型,得到所述車(chē)輛三維模型的每個(gè)初始局部模型的頂點(diǎn)坐標(biāo),并根據(jù)所述車(chē)輛三維模型的所有所述初始局部模型的頂點(diǎn)坐標(biāo)生成所述車(chē)輛三維預(yù)測(cè)位置框。
24、在本技術(shù)的一些實(shí)施例中,所述根據(jù)所述車(chē)輛三維預(yù)測(cè)位置框和所述實(shí)時(shí)三維柵格地圖,判斷所述車(chē)輛三維預(yù)測(cè)位置框中的每個(gè)柵格是否被占據(jù),具體包括:
25、從第一個(gè)所述推位軌跡點(diǎn)開(kāi)始,執(zhí)行柵格遍歷步驟;其中,所述柵格遍歷步驟包括:將與第一個(gè)所述推位軌跡點(diǎn)相對(duì)應(yīng)的所述車(chē)輛三維預(yù)測(cè)位置框的每個(gè)所述初始局部模型的頂點(diǎn)坐標(biāo)分別轉(zhuǎn)換為所述實(shí)時(shí)三維柵格地圖的柵格坐標(biāo),記為頂點(diǎn)柵格坐標(biāo);遍歷所述車(chē)輛三維預(yù)測(cè)位置框的所有頂點(diǎn)柵格坐標(biāo)所圍區(qū)域內(nèi)的所有柵格值,判斷是否存在大于預(yù)設(shè)閾值的柵格;
26、若存在,則判定第一個(gè)所述推位軌跡點(diǎn)相對(duì)應(yīng)的所述車(chē)輛三維預(yù)測(cè)位置框中的柵格被占據(jù),停止遍歷,否則對(duì)第二個(gè)所述推位軌跡點(diǎn)執(zhí)行柵格遍歷步驟,直至判定柵格被占據(jù)或者遍歷完所有所述推位軌跡點(diǎn)。
27、第二方面,本技術(shù)實(shí)施例提供了一種基于三維柵格地圖的無(wú)人清掃車(chē)主動(dòng)安全系統(tǒng),所述無(wú)人清掃車(chē)主動(dòng)安全系統(tǒng)包括:
28、地圖構(gòu)建模塊,用于實(shí)時(shí)獲取激光雷達(dá)點(diǎn)云數(shù)據(jù)信息,并根據(jù)當(dāng)前幀的激光雷達(dá)點(diǎn)云數(shù)據(jù)信息構(gòu)建實(shí)時(shí)三維柵格地圖;
29、推位生成模塊,用于實(shí)時(shí)獲取車(chē)輛底盤(pán)反饋的車(chē)輛擋位和前輪轉(zhuǎn)角數(shù)據(jù)信息,并對(duì)車(chē)輛推位預(yù)測(cè)速度、采樣時(shí)間及推位軌跡點(diǎn)數(shù)量進(jìn)行預(yù)設(shè)置,根據(jù)車(chē)輛運(yùn)動(dòng)學(xué)模型構(gòu)建車(chē)輛推位預(yù)測(cè)軌跡,并根據(jù)車(chē)輛三維模型和所述車(chē)輛推位預(yù)測(cè)軌跡,生成基于預(yù)測(cè)軌跡點(diǎn)的車(chē)輛三維預(yù)測(cè)位置框;其中,所述車(chē)輛推位預(yù)測(cè)軌跡包括每個(gè)推位軌跡點(diǎn)的位置姿態(tài)信息;
30、柵格占據(jù)判斷模塊,用于根據(jù)所述車(chē)輛三維預(yù)測(cè)位置框和所述實(shí)時(shí)三維柵格地圖,判斷所述車(chē)輛三維預(yù)測(cè)位置框中的每個(gè)柵格是否被占據(jù),并用于若所述車(chē)輛三維預(yù)測(cè)位置框中的某個(gè)柵格被占據(jù),則計(jì)算所述車(chē)輛三維預(yù)測(cè)位置框與車(chē)輛實(shí)際位置之間的距離,作為障礙物距離信息輸出,并根據(jù)輸出的所述障礙物距離信息判斷是否進(jìn)行主動(dòng)安全制動(dòng)。
31、第三方面,本技術(shù)實(shí)施例提供了一種基于三維柵格地圖的無(wú)人清掃車(chē)主動(dòng)安全裝置,包括處理器、存儲(chǔ)器以及存儲(chǔ)在所述存儲(chǔ)器中的計(jì)算機(jī)程序,所述處理器執(zhí)行所述計(jì)算機(jī)程序時(shí),執(zhí)行如第一方面所述的基于三維柵格地圖的無(wú)人清掃車(chē)主動(dòng)安全方法。
32、第四方面,本技術(shù)實(shí)施例提供了一種計(jì)算機(jī)可讀存儲(chǔ)介質(zhì),其上存儲(chǔ)有計(jì)算機(jī)程序,所述計(jì)算機(jī)程序被處理器執(zhí)行時(shí)實(shí)現(xiàn)如第一方面所述的基于三維柵格地圖的無(wú)人清掃車(chē)主動(dòng)安全方法。
33、第五方面,本技術(shù)實(shí)施例提供了一種計(jì)算機(jī)程序產(chǎn)品,所述計(jì)算機(jī)程序產(chǎn)品中包含有指令,當(dāng)指令在計(jì)算機(jī)或處理器上運(yùn)行時(shí),使得計(jì)算機(jī)或處理器執(zhí)行如第一方面所述的基于三維柵格地圖的無(wú)人清掃車(chē)主動(dòng)安全方法。
34、本技術(shù)實(shí)施例的有益效果如下:
35、該無(wú)人清掃車(chē)主動(dòng)安全方法采用將實(shí)時(shí)激光雷達(dá)點(diǎn)云轉(zhuǎn)換為實(shí)時(shí)三維柵格地圖的方式,并根據(jù)車(chē)輛實(shí)時(shí)反饋的狀態(tài)信息預(yù)測(cè)車(chē)輛行駛軌跡,判斷基于預(yù)測(cè)軌跡的車(chē)輛三維框體的柵格是否被占據(jù),以確認(rèn)車(chē)輛是否會(huì)發(fā)生碰撞,并得到車(chē)輛和障礙物之間的距離信息,根據(jù)該距離信息可靈活調(diào)整車(chē)輛進(jìn)行緊急制動(dòng)的時(shí)機(jī),有效保證了無(wú)人清掃車(chē)行駛過(guò)程中的實(shí)時(shí)安全,使無(wú)人清掃車(chē)安全可靠行駛,并保障與其他交通參與者之間的安全性,解決了現(xiàn)有技術(shù)使用超聲波雷達(dá)急停和直接使用激光雷達(dá)點(diǎn)云的方式中所存在的實(shí)時(shí)性、靈活性較差,以及誤檢導(dǎo)致車(chē)輛卡頓,或車(chē)輛模型導(dǎo)致誤接管的問(wèn)題。
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!