一種軌道監(jiān)測方法及監(jiān)測裝置
本發(fā)明涉及軌道監(jiān)測領(lǐng)域,具體的說是一種軌道監(jiān)測方法及監(jiān)測裝置。
背景技術(shù):
1、在軌道交通列車在運行時,會對軌道產(chǎn)生磨損和振動,導致軌道的位姿會發(fā)生變動,為了保證軌道交通列車正常運行,通常需要定期對軌道進行檢測,如檢測軌道中線、軌面磨損等。特別是針對鐵路線下穿施工,需要針對此施工路段軌道狀態(tài)進行重點監(jiān)控,以確保行車安全。針對軌道檢測需求,涌現(xiàn)了一批專門用于檢測軌道檢測的軌道檢測設(shè)備,測量時,將軌道檢測設(shè)備架設(shè)到軌道上,然后推動軌道檢測設(shè)備沿軌道移動。
2、目前常規(guī)的軌道檢測設(shè)備主要有軌道檢測小車,軌道檢測小車是一種檢測靜態(tài)軌道不平順的便捷工具。它采用電測傳感器、專用便攜式計算機等先進檢測和數(shù)據(jù)處理設(shè)備,可檢測高低、水平、扭曲、軌向等軌道不平順參數(shù)。如公開號為cn109281238a的中國發(fā)明專利公開了一種軌道檢測儀,利用架設(shè)于軌道上的主梁和沿軌道滑行的行走輪組件,用于檢測軌據(jù)。公開號為cn108466633a的中國發(fā)明專利公開了一種軌道檢測機器人,該機器人能夠在單根軌道上行走且能夠維持穩(wěn)定。
3、然而現(xiàn)有技術(shù)中的軌道檢測小車存在如下技術(shù)問題:
4、(1)檢測小車是在軌道上行走,當軌道上有行車時,需要拆除監(jiān)測裝置,從而造成監(jiān)測效率低的問題;
5、(2)檢測項目較為單一,使得對軌道的檢測效率降低;
6、(3)當軌道行車發(fā)生振動時,會對監(jiān)測精度造成干擾;
7、(4)無法對施工路段的軌道狀態(tài)進行實時監(jiān)測;
8、(5)大部分設(shè)備需要有人值守,實用性和便捷性較差。
技術(shù)實現(xiàn)思路
1、為了解決現(xiàn)有技術(shù)中的不足,本發(fā)明提供一種軌道監(jiān)測方法及監(jiān)測裝置,該監(jiān)測方法是依托于設(shè)置在施工便梁上的監(jiān)測裝置進行的,不會對軌道的正常行車造成影響,且該監(jiān)測方法能夠?qū)壍罓顟B(tài)、軌道扣件螺栓的緊固狀態(tài)、軌道的沉降、軌道間距多個項目進行無人值守監(jiān)測,監(jiān)測范圍廣。
2、為了實現(xiàn)上述目的,本發(fā)明采用的具體方案為:
3、一方面,本發(fā)明提供了一種軌道監(jiān)測方法,能夠?qū)芊旁谑┕け懔褐袡M梁上的軌道進行監(jiān)測,主要包括如下步驟:
4、s1、在施工便梁的兩根縱梁頂部安裝軌道監(jiān)測裝置,所述軌道設(shè)于兩根縱梁之間,且軌道的延伸方向與縱梁的延伸方向一致,所述軌道監(jiān)測裝置包括沿縱梁的延伸方向鋪設(shè)的走行軌路、以及能夠沿走行軌路進行往復移動的監(jiān)測小車,所述監(jiān)測小車能夠?qū)壍肋M行監(jiān)測,所述監(jiān)測小車包括含有接收處理模塊的控制器、以及與控制器相連的利用第一機械臂進行多自由度運動的激光位移傳感器和利用第二機械臂進行多自由度運動的攝像頭;
5、s2、利用所述監(jiān)測小車能夠?qū)壍肋M行以下任意一種情況的監(jiān)測:
6、(1)待監(jiān)測小車移動至監(jiān)測地點后,利用第一機械臂調(diào)整激光位移傳感器至目標位置,激光位移傳感器采集軌道三維空間數(shù)據(jù),控制器接收軌道三維空間數(shù)據(jù),并進行數(shù)據(jù)處理,獲取軌道數(shù)據(jù),能夠?qū)壍肋M行狀態(tài)監(jiān)測;
7、(2)待監(jiān)測小車移動至監(jiān)測地點后,利用第一機械臂調(diào)整激光位移傳感器至目標位置,利用第二機械臂將攝像頭調(diào)整至目標位置,激光位移傳感器采集軌道三維空間數(shù)據(jù),攝像頭拍攝軌道扣件螺栓圖像,控制器接收軌道三維空間數(shù)據(jù)和軌道扣件螺栓圖像后,進行數(shù)據(jù)處理,獲取軌道扣件螺栓緊固狀態(tài)的判斷數(shù)據(jù),進行能夠?qū)壍揽奂菟ǖ木o固狀態(tài)進行監(jiān)測;
8、(3)在所述監(jiān)測小車上設(shè)置棱鏡,在施工便梁附近的高地上設(shè)置全站儀,所述全站儀與控制器相連;兩臺監(jiān)測小車同時同向行駛,到達對應(yīng)監(jiān)測地點,激光位移傳感器測量同側(cè)單軌高度和/或單軌到同側(cè)激光位移傳感器的距離,所述全站儀能夠自動追蹤棱鏡進而測量監(jiān)測小車的位置數(shù)據(jù),所述攝像頭能夠?qū)筛壍肋M行拍攝,控制器對接收的同側(cè)單軌高度和/或單軌到同側(cè)激光位移傳感器的距離、以及監(jiān)測小車的位置數(shù)據(jù)進行一次整合,然后對通過處理圖像獲取的軌道變化數(shù)據(jù)和一次整合結(jié)果進行二次整合,獲得軌道沉降和/或軌道間距數(shù)據(jù),進而能夠?qū)壍赖某两怠⒑?或軌道間距進行監(jiān)測;
9、s3、若監(jiān)測到異常數(shù)據(jù),則啟動報警,提醒相關(guān)部門注意。
10、另一方面,本發(fā)明提供了一種軌道監(jiān)測裝置,包括沿兩根縱梁的延伸方向鋪設(shè)于縱梁頂部的走行軌路、以及能夠沿走行軌路進行往復移動的監(jiān)測小車,兩個監(jiān)測小車相對設(shè)置,所述監(jiān)測小車包括含有接收處理模塊的控制器、棱鏡、以及與控制器相連的利用第一機械臂進行多自由度旋轉(zhuǎn)的激光位移傳感器和利用第二機械臂進行多自由度旋轉(zhuǎn)的攝像頭。
11、進一步地,所述監(jiān)測小車包括底板,所述第一機械臂、第二機械臂和棱鏡均設(shè)于底板上。
12、進一步地,所述走行軌路為齒條軌路,所述底板下方設(shè)有能夠與走行軌路相嚙合的走行齒輪,所述走行齒輪與走行驅(qū)動電機相連;走行齒輪周圍設(shè)有齒輪圈數(shù)傳感器,所述齒輪圈數(shù)傳感器能夠記錄走行齒輪所旋轉(zhuǎn)的圈數(shù),并傳送至控制器,所述控制器能夠計算出監(jiān)測小車位移距離,得到監(jiān)測小車的實時位置信息,判斷監(jiān)測小車是否到達監(jiān)測地點。
13、進一步地,所述第二機械臂設(shè)于移動凸臺上,所述移動凸臺能夠相對于底板進行橫向和縱向移動。
14、進一步地,所述底板上端面設(shè)有橫向驅(qū)動組件,橫向驅(qū)動組件上設(shè)有縱向驅(qū)動組件,所述移動凸臺安裝在縱向驅(qū)動組件上,通過橫向驅(qū)動組件和縱向驅(qū)動組件能夠?qū)Φ诙C械臂進行移動。
15、進一步地,所述橫向驅(qū)動組件和縱向驅(qū)動組件均采用電機絲杠模組。
16、進一步地,所述縱梁頂部于走行軌路的兩側(cè)還平行鋪設(shè)有限位軌路,所述監(jiān)測小車上于走行齒輪的兩側(cè)均設(shè)有限位車輪,所述限位車輪與限位軌路相配合能夠限制監(jiān)測小車沿橫梁的延伸方向進行移動。
17、有益效果:
18、(1)本發(fā)明的監(jiān)測方法能夠?qū)壍罓顟B(tài)、軌道扣件螺栓的緊固狀態(tài)、軌道的沉降、軌道間距多個項目進行監(jiān)測,監(jiān)測范圍廣。
19、(2)本發(fā)明的軌道監(jiān)測裝置設(shè)在軌道兩側(cè)的縱梁上,不會對軌道的正常行車造成影響,無需拆除監(jiān)測裝置。
20、(3)本發(fā)明的軌道監(jiān)測裝置還包括全站儀和棱鏡,能夠在監(jiān)測軌道的沉降、軌道間距時,消除因縱梁變形而引起的誤差,提高監(jiān)測精度。
21、(4)本發(fā)明的軌道監(jiān)測裝置包括激光位移傳感器和攝像頭,兩者相互配合,縱使在惡劣天氣下,也能夠?qū)壍揽奂菟ǖ木o固狀態(tài)進行監(jiān)測。
22、(5)本發(fā)明在監(jiān)測軌道的沉降、軌道間距時,利用激光位移傳感器采集的信息獲取初始的軌道沉降和軌距數(shù)據(jù),利用攝像頭拍攝圖像獲取軌道變化值,利用兩組數(shù)據(jù)進行相互矯正,提高軌距和軌道沉降的監(jiān)測精度。
23、(6)本發(fā)明在監(jiān)測到數(shù)據(jù)異常時,能夠進行報警,能夠防止災(zāi)害事故的發(fā)生和擴大,減少損失,并實現(xiàn)自動監(jiān)測和無人值守。
技術(shù)特征:
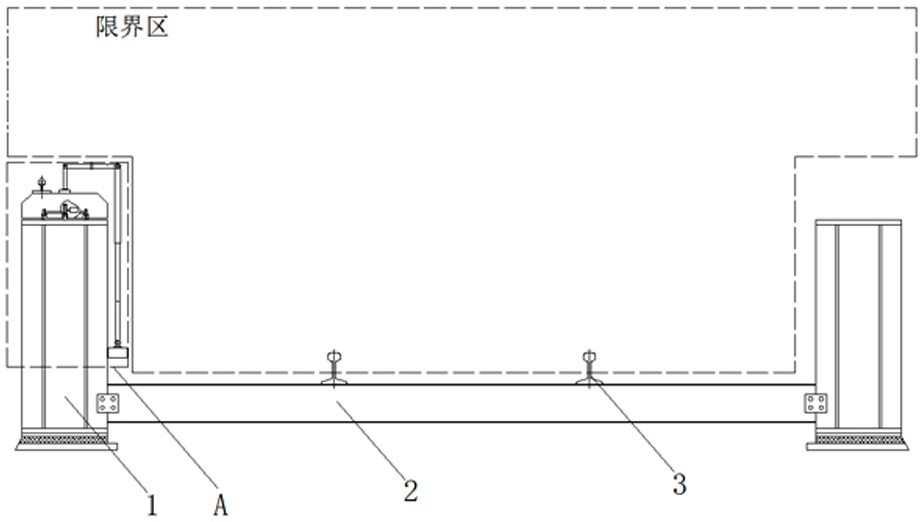
1.一種軌道監(jiān)測方法,能夠?qū)芊旁谑┕け懔褐袡M梁(2)上的軌道(3)進行監(jiān)測,其特征在于,主要包括如下步驟:
2.一種軌道監(jiān)測裝置,其特征在于,包括沿兩根縱梁(1)的延伸方向鋪設(shè)于縱梁(1)頂部的走行軌路(18)、以及能夠沿對應(yīng)的走行軌路(18)進行往復移動的監(jiān)測小車,兩個監(jiān)測小車相對設(shè)置,所述監(jiān)測小車包括含有接收處理模塊的控制器、棱鏡(13)、以及與控制器相連的利用第一機械臂進行多自由度旋轉(zhuǎn)的激光位移傳感器(4)和利用第二機械臂進行多自由度旋轉(zhuǎn)的攝像頭(21)。
3.根據(jù)權(quán)利要求2所述的一種軌道監(jiān)測裝置,其特征在于,所述監(jiān)測小車包括底板(20),所述第一機械臂、第二機械臂和棱鏡(13)均設(shè)于底板(20)上。
4.根據(jù)權(quán)利要求3所述的一種軌道監(jiān)測裝置,其特征在于,所述走行軌路(18)為齒條軌路,所述底板(20)下方設(shè)有能夠與走行軌路(18)相嚙合的走行齒輪(15),所述走行齒輪(15)與走行驅(qū)動電機(19)相連;走行齒輪(15)周圍設(shè)有齒輪圈數(shù)傳感器(14),所述齒輪圈數(shù)傳感器(14)能夠記錄走行齒輪(15)所旋轉(zhuǎn)的圈數(shù),并傳送至控制器,所述控制器能夠計算出監(jiān)測小車位移距離,得到監(jiān)測小車的實時位置信息,判斷監(jiān)測小車是否到達監(jiān)測地點。
5.根據(jù)權(quán)利要求3所述的一種軌道監(jiān)測裝置,其特征在于,所述第二機械臂設(shè)于移動凸臺(26)上,所述移動凸臺(26)能夠相對于底板(20)進行橫向和縱向移動。
6.根據(jù)權(quán)利要求5所述的一種軌道監(jiān)測裝置,其特征在于,所述底板(20)上端面設(shè)有橫向驅(qū)動組件(28),橫向驅(qū)動組件(28)上設(shè)有縱向驅(qū)動組件(27),所述移動凸臺(26)安裝在縱向驅(qū)動組件(27)上,通過橫向驅(qū)動組件(28)和縱向驅(qū)動組件(27)能夠?qū)Φ诙C械臂進行移動。
7.根據(jù)權(quán)利要求6所述的一種軌道監(jiān)測裝置,其特征在于,所述橫向驅(qū)動組件(28)和縱向驅(qū)動組件(27)均采用電機絲杠模組。
8.根據(jù)權(quán)利要求4所述的一種軌道監(jiān)測裝置,其特征在于,所述縱梁(1)頂部于走行軌路(18)的兩側(cè)還平行鋪設(shè)有限位軌路(17),所述監(jiān)測小車上于走行齒輪(15)的兩側(cè)均設(shè)有限位車輪(16),所述限位車輪(16)與限位軌路(17)相配合能夠限制監(jiān)測小車沿橫梁(2)的延伸方向進行移動。
技術(shù)總結(jié)
本發(fā)明提供一種軌道監(jiān)測方法及監(jiān)測裝置,該軌道監(jiān)測方法具體方法為:在施工便梁的兩根縱梁頂部安裝軌道監(jiān)測裝置,軌道監(jiān)測裝置包括走行軌路、以及能夠沿走行軌路進行往復移動的監(jiān)測小車,監(jiān)測小車包括控制器、激光傳感器和攝像頭,在監(jiān)測小車上設(shè)置監(jiān)測棱鏡,在施工便梁附近的高地上設(shè)置全站儀;利用監(jiān)測小車對軌道狀態(tài)、軌道扣件螺栓的緊固狀態(tài)、軌道的沉降及間距進行監(jiān)測,當控制器監(jiān)測到異常數(shù)據(jù)時,控制器發(fā)出報警。該監(jiān)測方法是依托于設(shè)置在施工便梁上的監(jiān)測裝置進行的,不會對軌道的正常行車造成影響,且該監(jiān)測方法能夠?qū)壍罓顟B(tài)、軌道扣件螺栓的緊固狀態(tài)、軌道的沉降、軌道間距多個項目進行無人值守監(jiān)測,監(jiān)測范圍廣。
技術(shù)研發(fā)人員:李玉如,劉通,黃克杰,徐立友,謝君科,張伏,曹付義,郭志軍
受保護的技術(shù)使用者:河南科技大學
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!