一種可快速裝配的無人機電源及其安裝方法
本發明涉及無人機電源,具體來說,涉及一種可快速裝配的無人機電源及其安裝方法。
背景技術:
1、無人駕駛飛機簡稱“無人機”,它是利用無線電遙控設備和自備的程序控制裝置操縱的不載人飛行器。無人機實際上是無人駕駛飛行器的統稱。
2、傳統的無人機為了保證持續的續航,一般都連接有電源件來實現對無人機的持續供電。目前,現有的無人機為了保證電源件的連接穩定性,防止電源件在使用過程中脫落,均在無人機的本體上設置有電源件的收容槽,并且該收容槽一般由側面的殼體,以及上殼體和下殼體組成,進而在裝配時,將電源件由上而下插入到該收容槽內。但是,這樣設計導致電源件插拔困難,不便于人們對電源的安裝。
3、經檢索,公告號為cn213636197u的中國實用新型專利,公開了一種便于安裝的無人機電池組件,所述限位滑軌帶動所述電池本體滑進所述限位滑槽中,所述定位柱卡合進所述固定孔內,所述支撐板支撐所述支撐柱,所述支撐柱限位所述復原彈簧,所述轉動件帶動所述限位件轉動,所述限位件卡合進所述限位孔中,固定所述電池本體。
4、綜合現有技術發現上述專利還存在以下不足:僅僅通過一組限位件來實現對整個電池組件的鎖緊固定,其鎖緊能力有限,從而導致電池組件在固定后其穩定性效果相對較差,在無人機工作時容易出現松動掉落的情況。因此,亟需一種可快速裝配的無人機電源及其安裝方法來解決上述問題。
技術實現思路
1、針對相關技術中的問題,本發明提出一種可快速裝配的無人機電源及其安裝方法,以克服現有相關技術所存在的上述技術問題。
2、本發明的技術方案是這樣實現的:
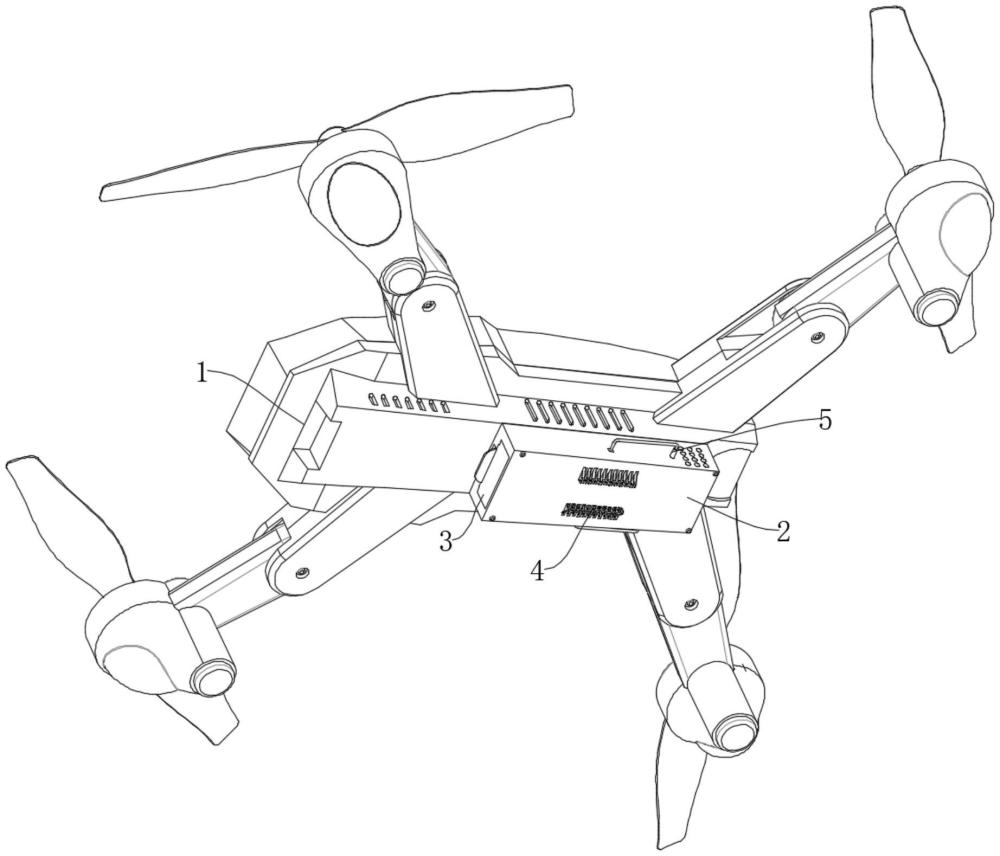
3、一種可快速裝配的無人機電源,包括電池倉,所述電池倉固定連接在無人機本體的底部外壁上,所述電池倉的內部插接有殼體,所述殼體的內部固定連接有電池體,接線端子的一端插接于所述殼體的內部,
4、所述電池倉的底部設置有用于對所述殼體進行固定的第一定位組件;
5、所述電池倉的內部設置有用于對所述殼體進行鎖緊的第二定位組件;
6、所述殼體的內部設置有驅動組件;
7、所述第二定位組件包括固定連接在所述電池倉一側內壁的導向柱和第二彈簧,所述導向柱的圓周外壁套接有擋框,所述殼體的頂部外壁固定連接有推桿,所述推桿的一側外壁與所述擋框的一側外壁相接觸,所述電池倉的兩側內壁均固定連接有第三彈簧,所述第三彈簧的一端固定連接有卡塊,所述殼體的兩側外壁均開設有卡槽,所述卡塊的一端從所述卡槽的內部穿過,所述卡塊的一側外壁固定連接有活動柱,所述活動柱遠離所述卡塊的一端延伸至所述電池倉的外部,所述活動柱延伸至所述電池倉外部的一端固定連接有彎桿,所述電池倉的兩側外壁均開設有通槽,所述彎桿遠離所述活動柱的一端從所述通槽的內部穿過。
8、進一步地,所述驅動組件包括固定連接在所述彎桿一端的齒條,所述齒條嚙合有第一齒輪,所述第一齒輪的圓周內壁固定連接有第二轉動柱,所述第二轉動柱的兩端與所述殼體的兩側內壁轉動連接,所述第二轉動柱的圓周外壁固定連接有第三齒輪,所述第三齒輪嚙合有第二齒輪,所述第二齒輪的圓周內壁固定連接有第三轉動柱,所述第二齒輪的圓周外壁嚙合有齒扇,所述殼體的一側內壁固定連接有固定座,所述第二轉動柱和所述第三轉動柱均與所述固定座轉動連接。
9、進一步地,所述電池倉的兩側外壁均開設有等距離分布的第一通風孔,所述殼體的兩側外壁均開設有等距離分布的第二通風孔。
10、進一步地,所述第一定位組件包括開設在所述殼體底部內壁的第二矩形槽和開設在所述電池倉底部內壁的第一矩形槽,所述第一矩形槽的規格與所述第二矩形槽的規格相同,所述第一矩形槽與所述第二矩形槽相連通,所述第二矩形槽的兩側內壁均轉動連接有第一轉動柱,所述第一轉動柱的圓周外壁固定連接有等距離分布的套管,所述套管的圓周外壁固定連接有活動板,所述活動板遠離所述套管的一端從所述第一矩形槽、所述第二矩形槽的內部穿過。
11、進一步地,兩組所述活動板的一側外壁均固定連接有第一彈簧,所述第一彈簧遠離所述活動板的一端固定連接在所述殼體的一側內壁上。
12、進一步地,所述電池倉的底部外壁固定連接有側板,所述活動板位于兩組所述側板的中部,兩組所述側板與所述活動板形成有散熱通道。
13、進一步地,兩組所述側板的一側外壁均開設有進風槽,兩組所述側板靠近所述活動板的一側外壁均固定連接有導風罩,所述導風罩的一端固定連接有導流板,所述導流板的橫截面呈波浪形,所述進風槽與所述導風罩相連通。
14、進一步地,所述第二矩形槽的一側內壁固定連接有擋板,所述電池體通過加強架固定連接在所述殼體的一側內壁上。
15、進一步地,所述電池倉的一側開設有插槽,所述殼體的一端從所述插槽的內部穿過,所述殼體的一側外壁固定連接有連接板。
16、一種無人機電源的安裝方法,其采用上述實施例所述的一種可快速裝配的無人機電源,包括以下步驟:
17、s1:將殼體的一端從電池倉端部的插槽內插入直至電池體與接線端子完全配合;
18、s2:卡塊通過第三彈簧的壓力卡接在殼體兩側的卡槽內實現對殼體的鎖定;
19、s3:驅動組件工作時第一定位組件中的多組活動板插接于第一矩形槽和第二矩形槽內,完成了對殼體的二次固定鎖緊;
20、s4:拉動兩側彎桿使卡塊從卡槽內脫離,再將殼體從電池倉的內部抽出,完成對殼體和電池體的拆卸工作。
21、本發明的有益效果:
22、本發明提供的一種可快速裝配的無人機電源及其安裝方法,通過設置的第二定位組件,在需要對電源進行安裝時,可以首先將殼體的一端從電池倉端部的插槽內插入,直至殼體頂部的推桿與擋框相接觸,此時電池倉內部的兩組卡塊一側外壁均與擋框的一側外壁相抵觸,且第三彈簧處于壓縮狀態,當殼體繼續推入時,推桿推動擋框向靠近接線端子的方向運動,直至卡塊完全不受擋框阻擋為止,此時卡塊通過第三彈簧的彈力抵觸在殼體的一側外壁上,當殼體內部的電池體完全與接線端子相配合時,殼體兩側卡槽剛好與卡塊相配合,此時卡塊通過第三彈簧的彈力瞬間彈入卡槽內部,實現了對殼體兩側的鎖緊固定,整個安裝過程中,人們只需要完成將殼體插入至電池倉的一個動作即可,實現了對電池體的快速安裝,提高了人們對電池體的安裝效率。
23、本發明提供的一種可快速裝配的無人機電源及其安裝方法,通過設置的驅動組件和第一定位組件,在卡塊彈入卡槽內部的同時彎桿一端的齒條也會一同向殼體內部移動,在齒條插入至殼體內部的過程中會帶動與其相嚙合的第一齒輪轉動,通過第一齒輪的轉動能夠帶動第二轉動柱轉動,在第二轉動柱轉動的過程中可以帶動第三齒輪轉動,通過第三齒輪可以帶動與其相嚙合的第二齒輪一同轉動,同時第二齒輪與齒扇之間也相互嚙合,從而使齒扇與第一齒輪一同做順時針轉動,當齒扇順時針轉動時能夠將活動板順時針轉動至一定角度并插接在第一矩形槽和第二矩形槽內部,通過等距離分布的活動板均插接在第一矩形槽和第二矩形槽內部可以實現對殼體的加固鎖緊,進一步提高了電池體安裝后整體的穩固性,避免在后續無人機本體起飛時出現殼體松動甚至脫落的情況發生。
24、本發明提供的一種可快速裝配的無人機電源及其安裝方法,通過設置的第一定位組件、側板、進風槽和導風罩,在活動板打開后會與電池倉底部的兩組側板形成散熱通道,該散熱通道能夠對無人機本體飛行過程中的氣流快速導入電池倉和殼體內部,進而能夠加快殼體內部的電池體的快速散熱,保證電池體能夠始終處于一個適宜的工作溫度環境中,同時通過開設在側板一側的進風槽和導風罩可以對無人機本體飛行時多個方向的氣流進行導向收集,實現了無人機在執行不同方向飛行任務時均能夠得到良好散熱的效果,避免電池體在長時間供電時出現發熱嚴重等情況發生。
- 還沒有人留言評論。精彩留言會獲得點贊!