一種月面探測爬行機器人
本發明涉及深空探測機器人,特別涉及一種月面探測爬行機器人。
背景技術:
1、深空探測是人類探索宇宙的重要領域,涉及到對其他行星、衛星、小行星及彗星等天體的科學研究。隨著技術的進步,傳統的載人航天逐漸向無人探測轉變,而機器人探測器在這一過程中扮演了至關重要的角色。相較于載人航天,機器人探測的成本顯著降低,且能有效避免人類在深空探測中的生存風險。機器人可以在高輻射、極端溫度等對人類來說是非常危險的環境中進行長期的觀測和實驗,為科學家提供大量的數據支持。
2、月球表面由于隕石撞擊和火山爆發產生了許多月球坑,也存在大量巖漿冷卻后形成的熔巖管地形。月球洞穴的探索可以為理解月球火山活動提供新的視角,并可能確認穩定地下環境的存在,這些環境可以屏蔽輻射并具有適合人類使用的最佳溫度條件。當前探測任務中常用的輪式或者履帶式探測機器人難以深入這些特殊地形進行觀測,腿式機器人相比于輪式機器人具有更靈活的特點,可以自由進出這些地形并獲得隱藏在其中的地質信息。
3、因此,設計一種月面探測爬行機器人可以更好的滿足針對月球坑或熔巖管地形的月球探測任務的需求。
技術實現思路
1、針對上述問題,本發明的目的在于提供一種月面探測爬行機器人,以更好的滿足針對月球坑或熔巖管地形的月球探測任務的需求。
2、為了實現上述目的,本發明采用以下技術方案:
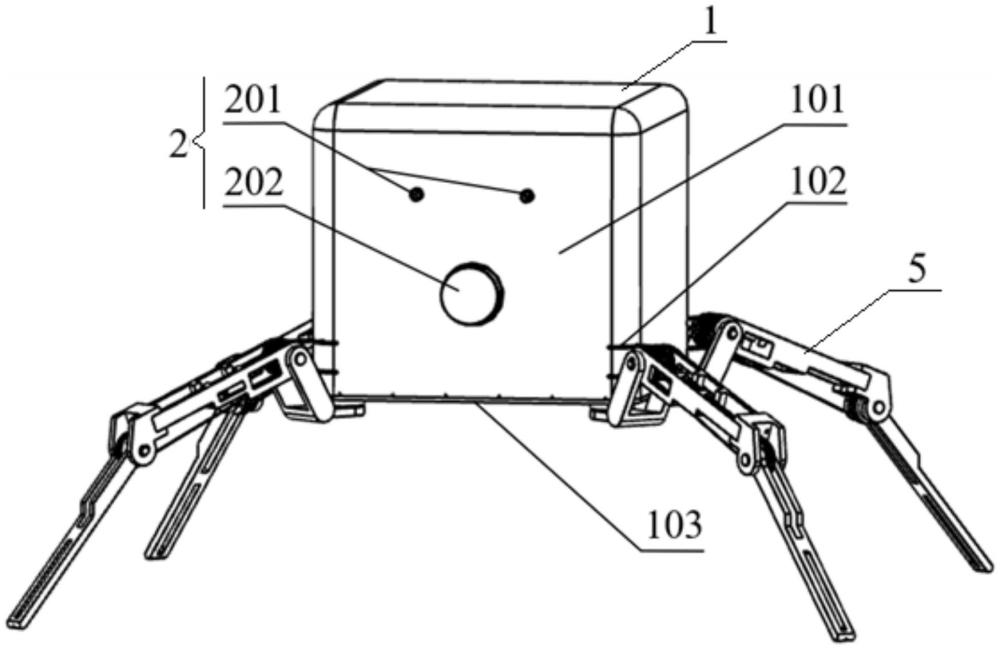
3、本發明提供一種月面探測爬行機器人,包括箱體、視覺模塊、控制模塊、腿部運動機構及驅動模塊,其中視覺模塊設置于箱體的正面,視覺模塊能將機器人周圍地形環境數據傳遞至控制模塊或發送回地面;腿部運動機構設置于箱體的箱體底板上,控制模塊和驅動模塊設置于箱體內,驅動模塊與腿部運動機構連接,控制模塊用于控制驅動模塊,驅動模塊用于驅動腿部運動機構進行運動,腿部運動機構配合視覺模塊在月面崎嶇地形上實現爬行和轉向的動作,完成對月球表面地貌環境的探測。
4、所述腿部運動機構包括轉向關節、轉臺、后腿及前腿,其中轉向關節設置于所述箱體上,轉向關節的上端與轉臺連接,轉向關節的下端置于所述箱體底板的外側、且通過后腿運動關節與后腿的后端連接,后腿的前端通過前腿運動關節與前腿連接;后腿運動關節和前腿運動關節與所述驅動模塊通過牽引繩傳動連接。
5、所述后腿運動關節包括后腿關節固定軸、后腿關節連接件、帶輪ⅲ、帶輪ⅳ及帶輪ⅴ,其中后腿關節連接件的一端與所述后腿連接,另一端與所述轉向關節連接,帶輪ⅲ、帶輪ⅳ及帶輪ⅴ通過后腿關節固定軸同軸安裝在所述后腿的后端,帶輪ⅴ與所述后腿固連,帶輪ⅲ和帶輪ⅳ固連為一體,帶輪ⅲ和帶輪ⅴ分別通過牽引繩ⅱ和牽引繩ⅲ與所述驅動模塊連接,帶輪ⅳ通過牽引繩ⅳ與所述前腿運動關節連接。
6、所述前腿運動關節包括前腿關節固定軸和帶輪ⅵ,其中前腿關節固定軸用于連接所述后腿和所述前腿,所述后腿和前腿之間能夠相互轉動,帶輪ⅵ套裝在前腿關節固定軸上,且帶輪ⅵ與所述前腿連接,帶輪ⅵ轉動能夠帶動所述前腿同時轉動。
7、所述轉向關節包括從動帶輪、方位轉向關節轉軸、法蘭ⅰ及交叉滾子軸承,其中方位轉向關節轉軸與所述箱體底板轉動連接,從動帶輪固設于方位轉向關節轉軸上,且從動帶輪通過牽引繩ⅰ與所述驅動模塊連接;方位轉向關節轉軸的下端通過法蘭ⅰ與所述腿部運動機構連接。
8、所述驅動模塊包括轉向關節驅動電機和腿部關節驅動電機,其中轉向關節驅動電機通過支撐臺安裝在所述箱體底板上,且輸出端與主動帶輪連接,主動帶輪用于與所述轉向關節傳動連接;
9、所述腿部關節驅動電機包括設置于轉臺上的前腿關節驅動電機和后腿關節驅動電機,前腿關節驅動電機和后腿關節驅動電機分別為前腿運動關節和后腿運動關節的轉動提供動力。
10、所述腿部運動機構為四個,且分別設置于箱體底板的四角處;各所述腿部運動機構分別與一組所述驅動模塊連接。
11、所述控制模塊包括主控盒、慣性測量單元、方位轉向關節電機驅動模塊及腿部關節電機驅動模塊,其中主控盒負責編輯和儲存控制程序,并向其余控制模塊發送信號以調整整體運動方式;慣性測量單元用于測量機器人在運動過程中的加速度、角速度和周圍的磁場,并根據測量結果傳輸至主控盒以及時調整機器人的運動步態;方位轉向關節電機驅動模塊及腿部關節電機驅動模塊在接收主控盒傳遞的信號后控制各電機的參數。
12、所述視覺模塊包括一個環境雷達和兩個攝像頭,兩個攝像頭設置于環境雷達的上方。
13、所述的月面探測爬行機器人,還包括設置于所述箱體內的溫控模塊,溫控模塊安裝在箱體的中心部位,溫控模塊根據環境溫度維持所述箱體內部的溫度穩定。
14、本發明的優點與積極效果為:本發明提供的一種月面探測爬行機器人,采用四足運動機構,即四個腿部運動機構使得機器人可以在月球坑和熔巖管地形上可靠地移動,具有良好的運動性和敏捷性。
15、本發明采用繩傳動系統控制各關節運動,可以將腿部關節驅動電機集成在箱體內部,不需要額外設計結構用于保護驅動電機;同時極大地精簡了腿部運動機構的尺寸,降低了關節的重量和轉動慣量,提高了機器人的靈活性和運動性能。
16、本發明將絕大多數電子元件集成安裝在箱體內部,可以有效防止月面灰塵對元件的干擾與損壞,同時緊湊型排列方式使得熱控模塊更有效的完成溫度控制工作,且消耗的能源量更低。
技術特征:
1.一種月面探測爬行機器人,其特征在于,包括箱體(1)、視覺模塊(2)、控制模塊(3)、腿部運動機構(5)及驅動模塊(6),其中視覺模塊(2)設置于箱體(1)的正面,視覺模塊(2)能將機器人周圍地形環境數據傳遞至控制模塊(3)或發送回地面;腿部運動機構(5)設置于箱體(1)的箱體底板(103)上,控制模塊(3)和驅動模塊(6)設置于箱體(1)內,驅動模塊(6)與腿部運動機構(5)連接,控制模塊(3)用于控制驅動模塊(6),驅動模塊(6)用于驅動腿部運動機構(5)進行運動,腿部運動機構(5)配合視覺模塊(2)在月面崎嶇地形上實現爬行和轉向的動作,完成對月球表面地貌環境的探測。
2.根據權利要求1所述的月面探測爬行機器人,其特征在于,所述腿部運動機構(5)包括轉向關節(503)、轉臺(504)、后腿(505)及前腿(506),其中轉向關節(503)設置于所述箱體(1)上,轉向關節(503)的上端與轉臺(504)連接,轉向關節(503)的下端置于所述箱體底板(103)的外側、且通過后腿運動關節(507)與后腿(505)的后端連接,后腿(505)的前端通過前腿運動關節(508)與前腿(506)連接;后腿運動關節(507)和前腿運動關節(508)與所述驅動模塊(6)通過牽引繩傳動連接。
3.根據權利要求2所述的月面探測爬行機器人,其特征在于,所述后腿運動關節(507)包括后腿關節固定軸(5071)、后腿關節連接件(5072)、帶輪ⅲ(5073)、帶輪ⅳ(5074)及帶輪ⅴ(5075),其中后腿關節連接件(5072)的一端與所述后腿(505)連接,另一端與所述轉向關節(503)連接,帶輪ⅲ(5073)、帶輪ⅳ(5074)及帶輪ⅴ(5075)通過后腿關節固定軸(5071)同軸安裝在所述后腿(505)的后端,帶輪ⅴ(5075)與所述后腿(505)固連,帶輪ⅲ(5073)和帶輪ⅳ(5074)固連為一體,帶輪ⅲ(5073)和帶輪ⅴ(5075)分別通過牽引繩ⅱ(5092)和牽引繩ⅲ(5093)與所述驅動模塊(6)連接,帶輪ⅳ(5074)通過牽引繩ⅳ(5094)與所述前腿運動關節(508)連接。
4.根據權利要求2所述的月面探測爬行機器人,其特征在于,所述前腿運動關節(508)包括前腿關節固定軸(5081)和帶輪ⅵ(5082),其中前腿關節固定軸(5081)用于連接所述后腿(505)和所述前腿(506),所述后腿(505)和前腿(506)之間能夠相互轉動,帶輪ⅵ(5082)套裝在前腿關節固定軸(5081)上,且帶輪ⅵ(5082)與所述前腿(506)連接,帶輪ⅵ(5082)轉動能夠帶動所述前腿(506)同時轉動。
5.根據權利要求2所述的月面探測爬行機器人,其特征在于,所述轉向關節(503)包括從動帶輪(5031)、方位轉向關節轉軸(5032)、法蘭ⅰ(5033)及交叉滾子軸承(5034),其中方位轉向關節轉軸(5032)與所述箱體底板(103)轉動連接,從動帶輪(5031)固設于方位轉向關節轉軸(5032)上,且從動帶輪(5031)通過牽引繩ⅰ(5091)與所述驅動模塊(6)連接;方位轉向關節轉軸(5032)的下端通過法蘭ⅰ(5033)與所述腿部運動機構(5)連接。
6.根據權利要求2所述的月面探測爬行機器人,其特征在于,所述驅動模塊(6)包括轉向關節驅動電機(601)和腿部關節驅動電機(602),其中轉向關節驅動電機(601)通過支撐臺(501)安裝在所述箱體底板(103)上,且輸出端與主動帶輪(502)連接,主動帶輪(502)用于與所述轉向關節(503)傳動連接;
7.根據權利要求2所述的月面探測爬行機器人,其特征在于,所述腿部運動機構(5)為四個,且分別設置于箱體底板(103)的四角處;各所述腿部運動機構(5)分別與一組所述驅動模塊(6)連接。
8.根據權利要求1所述的月面探測爬行機器人,其特征在于,所述控制模塊(3)包括主控盒(301)、慣性測量單元(302)、方位轉向關節電機驅動模塊(303)及腿部關節電機驅動模塊(304),其中主控盒(301)負責編輯和儲存控制程序,并向其余控制模塊發送信號以調整整體運動方式;慣性測量單元(302)用于測量機器人在運動過程中的加速度、角速度和周圍的磁場,并根據測量結果傳輸至主控盒(301)以及時調整機器人的運動步態;方位轉向關節電機驅動模塊(303)及腿部關節電機驅動模塊(304)在接收主控盒(301)傳遞的信號后控制各電機的參數。
9.根據權利要求1所述的月面探測爬行機器人,其特征在于,所述視覺模塊(2)包括一個環境雷達(202)和兩個攝像頭(201),兩個攝像頭(201)設置于環境雷達(202)的上方。
10.根據權利要求1所述的月面探測爬行機器人,其特征在于,還包括設置于所述箱體(1)內的溫控模塊(4),溫控模塊(4)安裝在箱體(1)的中心部位,溫控模塊(4)根據環境溫度維持所述箱體(1)內部的溫度穩定。
技術總結
本發明涉及深空探測機器人技術領域,特別涉及一種月面探測爬行機器人。包括箱體、視覺模塊、控制模塊、腿部運動機構及驅動模塊,視覺模塊設置于箱體正面,視覺模塊能將機器人周圍地形環境數據傳遞至控制模塊或發送回地面;腿部運動機構設置于箱體底板上,控制模塊和驅動模塊設置于箱體內,驅動模塊與腿部運動機構連接,控制模塊控制驅動模塊,驅動模塊驅動腿部運動機構進行運動,腿部運動機構配合視覺模塊在月面崎嶇地形上實現爬行和轉向的動作,完成對月球表面地貌環境的探測。本發明的腿部運動機構使機器人可以在月球坑和熔巖管地形上可靠地移動,具有良好的運動性和敏捷性,降低了關節重量和轉動慣量,提高了機器人的靈活性和運動性能。
技術研發人員:李俊麟,孫強,張偉,王直峰
受保護的技術使用者:中國科學院沈陽自動化研究所
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!