一種風電場雙模式動態主動尾流控制方法、系統及介質
本發明屬于風力發電,具體涉及一種風電場雙模式動態主動尾流控制方法、系統及介質。
背景技術:
1、隨著世界對可再生能源需求的不斷增長,風電場規模不斷增大,在有限的面積內需要容納一定數量的風電機組,導致尾流效應逐漸變得越來越不容忽視。尾流效應指的是上游風力機組對下游風速場和湍流特性的干擾效應,通常表現為下游機組的功率損失和載荷增加。這一效應的積累不僅顯著降低了風電場的整體發電效率,還導致設備疲勞損耗加劇,對風電場的布局優化與控制策略提出了新的技術挑戰。因此,尾流效應已成為大規模風電場優化設計和智能控制領域的關鍵研究課題。風電場的運行模式通常分為兩種:一種是“最大功率輸出”模式,旨在盡可能地輸出更多電能;另一種是“功率參考追蹤”模式,主要目標是滿足電網給定的功率需求。在“最大功率輸出”模式下,傳統控制方法會將每臺風機設定在其各自的最大功率點。然而,由于尾流效應的存在,上游機組對風能的優先吸收顯著降低了下游機組的入流風速,從而導致下游機組功率輸出下降并產生功率損失。此外,尾流效應造成風電場內部的疲勞載荷分布不均衡,增加了下游機組的疲勞載荷壓力,不利于設備的長期穩定運行。在“功率參考追蹤”模式中,傳統控制方法會根據各機組當前的可用功率按比例分配策略計算每臺機組的功率參考值,以實現風電場的整體功率追蹤。然而,由于風速變化的不可控性,各機組在實際運行中會受到風速波動的影響,導致疲勞載荷劇烈起伏,不僅影響設備壽命,還可能導致風電場在風能不足時難以滿足電網的功率需求。這種情況下,如何在不同運行模式下實現功率最大化、疲勞載荷均衡以及電網功率需求的追蹤,成為當前風電場控制策略研究中的重要課題。因此,在目前的風電場運行優化控制領域,亟需一種適用于動態入流風速、考慮風電機組動態特性的風電場動態主動尾流控制方法,在風電場不同的工作模式下能夠提高其總體發電量,并平抑機組的疲勞載荷,從而為風電場運行優化控制提供更加適用的方法。
技術實現思路
1、本發明要解決的技術問題:針對現有技術的上述問題,提供一種風電場雙模式動態主動尾流控制方法、系統及介質,本發明旨在為風電場不同的工作模式下提高其發電量平衡其疲勞載荷分布,并通過動態主動尾流控制減弱風電場內尾流效應的影響,提高發電量、維持疲勞載荷平衡,以為運營商帶來更高的經濟收益。
2、為了解決上述技術問題,本發明采用的技術方案為:
3、一種風電場雙模式動態主動尾流控制方法,包括下述步驟:
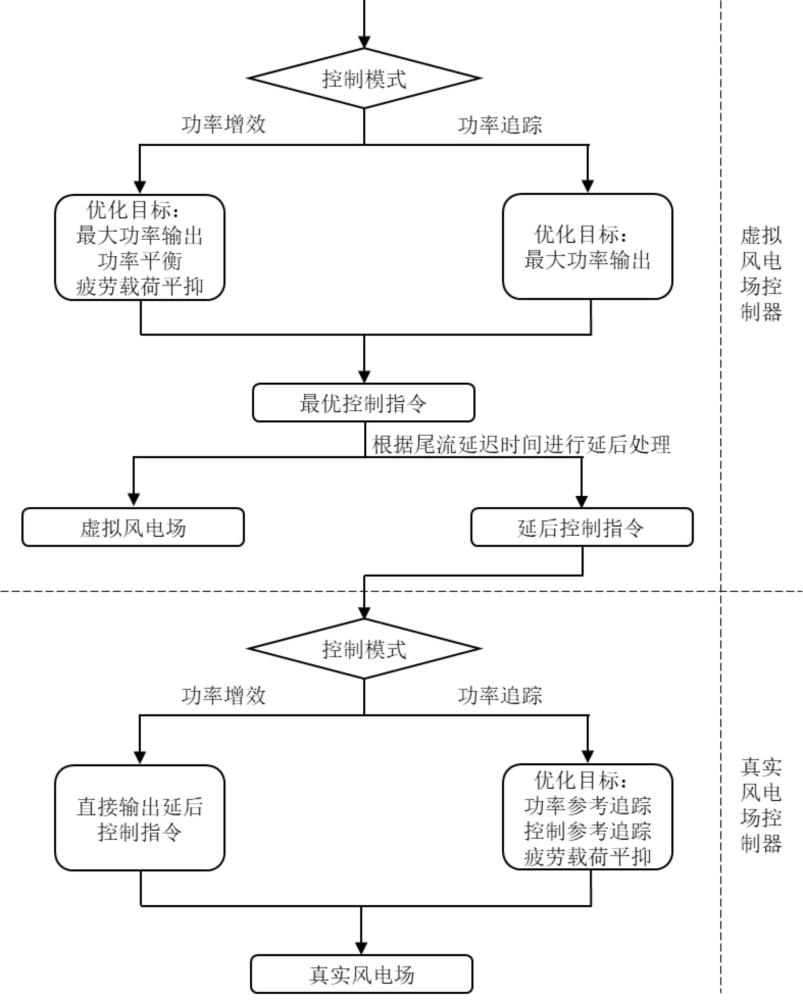
4、s1,針對聯合部署的虛擬風電場和真實風電場,虛擬風電場控制器判斷虛擬風電場當前的控制模式,如果為功率增效模式,則以最大功率輸出、功率平衡以及疲勞載荷平抑為優化目標求解風電場狀態空間模型獲取最優控制指令;如果為功率追蹤模式,則以最大功率輸出為優化目標求解風電場狀態空間模型獲取最優控制指令;將最優控制指令下發給虛擬風電場、并根據尾流延遲時間進行延后處理,并將得到的延后控制指令下發給真實風電場控制器;
5、s2,真實風電場控制器判斷真實風電場當前的控制模式,如果為功率增效模式,則直接輸出延后控制指令并下發給真實風電場;如果為功率追蹤模式,則以功率參考追蹤、控制參考追蹤和疲勞載荷平抑為優化目標求解風電場狀態空間模型獲取最終的最優控制指令并下發給真實風電場。
6、可選地,步驟s1中以最大功率輸出、功率平衡以及疲勞載荷平抑為優化目標求解風電場狀態空間模型獲取最優控制指令時,所采用的優化目標的函數表達式為:
7、,
8、上式中,為虛擬風電場在功率增效模式下的優化目標,為最大功率輸出的優化目標,為功率平衡的優化目標,為風電場疲勞載荷平抑的優化目標,為抑制控制量波動的優化目標,且有:
9、,
10、,
11、,
12、,
13、其中,為風電場的額定功率,為風電場總風機數量,為第 j臺風機的功率初始值,為第 j臺風機的功率增量,為手動設置的常數,和分別為第 j臺風機塔架的前后、左右位移增量,、、、和分別為各個優化目標的權重,和分別為k和k-1時刻的電壓增量,k為當前優化時間。
14、可選地,步驟s1中以最大功率輸出為優化目標求解風電場狀態空間模型獲取最優控制指令時,所采用的優化目標的函數表達式為:
15、,
16、其中,為虛擬風電場在功率參考追蹤模式下的優化問題,為最大功率輸出的優化目標,為抑制控制量波動的優化目標,且有:
17、,
18、,
19、其中,為風電場的額定功率,為風電場總風機數量,為第 j臺風機的功率初始值,為第 j臺風機的功率增量,和分別為各個優化目標的權重,和分別為k和k-1時刻的電壓增量,k為當前優化時間。
20、可選地,步驟s1中根據尾流延遲時間進行延后處理的延遲時間計算的函數表達式為:
21、,
22、上式中,為真實風電場中第 j臺風機的延遲時間,為真實風電場中第 j臺風機與第1臺風機沿著風向的地理距離,為平均入流風速。
23、可選地,步驟s2中以功率參考追蹤、控制參考追蹤和疲勞載荷平抑為優化目標求解風電場狀態空間模型獲取最終的最優控制指令并下發給真實風電場時,所采用的優化目標的函數表達式為:
24、,
25、其中,為真實風電場在功率參考追蹤模式下的優化目標,為風電場功率參考追蹤的優化目標,為風電場控制參考追蹤的優化目標,為風電場疲勞載荷平抑的優化目標,為抑制控制量波動的優化目標,且有:
26、,
27、,
28、,
29、,
30、其中,為風電場的功率參考指令,為風電場總風機數量,為第 j臺風機的功率初始值,為第 j臺風機的功率增量,為第 j臺風機的發電機電磁轉矩增量,為第 j臺風機的發電機電磁轉矩初始值,為第 j臺真實風機的發電機電磁轉矩參考值,為第 j臺風機的葉片槳距角增量,為第 j臺風機的葉片槳距角初始值,為第 j臺真實風機的葉片槳距角參考值,和分別為第 j臺風機塔架的前后、左右位移增量,和分別為k和k-1時刻的電壓增量,k為當前優化時間,、、、、和分別為各個優化目標的權重。
31、可選地,所述風電場狀態空間模型的函數表達式為:
32、,
33、,
34、上式中,為風電場的系統矩陣的一階導數?,、、、、、和均為風電場的系數矩陣,為風電場的輸出矩陣,為單位矩陣,為控制矩陣,且有,,分別為風電場的狀態矩陣、輸出矩陣和控制矩陣,~分別為第1~n臺風機的狀態矩陣,~分別為第1~n臺風機的輸出矩陣,~分別為第1~n臺風機的控制矩陣,任意第i臺風機的狀態矩陣、輸出矩陣和控制矩陣的表達式為:
35、,
36、,
37、,
38、其中,分別為第i臺風機的發電機轉速的增量、發電機電磁轉矩的增量、葉片槳距角的增量、塔架的前后移速的增量、塔架的前后位移的增量、塔架的左右移速的增量、塔架的左右位移的增量,分別為第i臺風機的發電機電磁轉矩參考值的增量和葉片槳距角參考值的增量,為第i臺風機的電磁功率的初始值。
39、可選地,步驟s1之前還包括構建風電場狀態空間模型的步驟:
40、s101,構建下式所示的兩自由度控制方法的風電機組非線性模型:
41、,
42、上式中,為發電機轉速的一階導數,為齒輪箱變比,為葉輪和發電機的等效慣量,為葉輪機械轉矩,為發電機電磁轉矩,為葉片槳距角的一階導數,為槳距角參考值,為變槳機構的時間常數,為發電機電磁轉矩的一階導數,為發電機電磁轉矩參考值,為發電機的時間常數,,為空氣密度,為葉輪半徑,為風機風能利用系數,為葉尖速比,為入流風速,為葉輪轉速;
43、s102,根據風電機組非線性模型構建風電機組的線性化模型:
44、,
45、上式中,δ表示增量,為葉輪機械轉矩的初始值, te0為發電機電磁轉矩的初始值,且有葉輪機械轉矩的增量為:
46、,
47、上式中,為入流風速的增量;
48、s103,構建風電機組的疲勞載荷指標設定為塔架的前后和左右位移:
49、,,
50、其中,和分別為塔架的前后、左右位移,和分別為塔架的前后、左右移速,、分別為塔架前后位移的二階和一階導數,、分別為塔架左右位移的二階和一階導數,、、分別為塔架的質量、阻尼和剛度,為塔架推力,為機艙受力,且有:,,其中為空氣密度,為葉輪半徑,為推力系數,為葉尖速比,為葉片槳距角,為入流風速,為塔架高度,為齒輪箱變比,為風機低速軸扭矩,且有:
51、,
52、其中,、分別為葉輪和發電機慣量;
53、s104,構建下式所示的疲勞載荷指標的線性化形式:
54、,
55、上式中,δ表示增量,且有:
56、,
57、;
58、s105,包含下式所示的疲勞載荷指標的第 i臺風機狀態空間模型:
59、,
60、,
61、其中,為第i臺風機的狀態矩陣,為的一階導數,為第i臺風機的控制矩陣,為的一階導數,為風機 i入流風速的增量,為第i臺風機的輸出矩陣,為的一階導數,、、、、為第i臺風機狀態空間模型的系數矩陣,且有:
62、,
63、,
64、,
65、,
66、,,
67、,,
68、其中,分別為第i臺風機的發電機轉速的增量、發電機電磁轉矩的增量、葉片槳距角的增量、塔架的前后移速的增量、塔架的前后位移的增量、塔架的左右移速的增量、塔架的左右位移的增量,分別為第i臺風機的發電機電磁轉矩參考值的增量和葉片槳距角參考值的增量,為第i臺風機的電磁功率的增量,為第i臺風機的葉輪機械轉矩,為第i臺風機的葉輪機械轉矩的初始值,為第i臺風機的發電機電磁轉矩的初始值,為第i臺風機的發電機轉速,為第i臺風機的發電機轉速的初始值,為第i臺風機的葉片槳距角,為第i臺風機的塔架推力,為第i臺風機的入流風速, μ為發電機效率;
69、s106,構建下式所示的風電場尾流模型線性化形式:
70、,
71、,
72、其中,為第 i臺風機對第 n臺風機造成的尾流風速的變化量,為第 i臺風機對第 n臺風機造成的尾流風速,為第 i臺風機的推力系數的變化量,為第 i臺風機的入流風速的變化量,且有:
73、,
74、,
75、其中,為jensen尾流模型尾流擴張系數,為第i臺風機與第 n臺虛擬風電機組沿著風向的距離,為葉輪半徑,為尾流覆蓋面積,為葉輪掃掠面積;
76、s107,根據風電場尾流模型線性化形式,確定第1~n臺風機的入流風速預測值的增量形式:
77、,
78、其中,為風速預測值的增量矩陣,為風電場的狀態矩陣,和為系數矩陣,且有:
79、,
80、,
81、系數矩陣 m和 n中任意元素和的表達式為:
82、,,
83、基于系數矩陣 n為下三角矩陣且所有對角線元素為0,將第1~n臺風機的入流風速預測值的增量形式化簡為:
84、,
85、其中,為單位矩陣;
86、s108,構建風電場狀態空間模型:
87、,
88、,
89、其中,,,分別為風電場的狀態矩陣、輸出矩陣和控制矩陣,,,,,分別為風電場狀態空間模型的系數矩陣,~分別為第1~n臺風機的狀態矩陣,~分別為第1~n臺風機的輸出矩陣,~分別為第1~n臺風機的控制矩陣,~分別為第1~n臺風機的系數矩陣,~分別為第1~n臺風機的系數矩陣,~分別為第1~n臺風機的系數矩陣,~分別為第1~n臺風機的系數矩陣,~分別為第1~n臺風機的系數矩陣;代入第1~n臺風機的入流風速預測值的增量形式以得到風電場狀態空間模型的化簡形式:
90、,
91、,
92、以用于結合指定的目標求解風電場狀態空間模型獲取最優控制指令。
93、此外,本發明還提供一種風電場雙模式動態主動尾流控制系統,包括相互連接的微處理器和存儲器,所述微處理器被編程或配置以執行所述風電場雙模式動態主動尾流控制方法。
94、此外,本發明還提供一種計算機可讀存儲介質,該計算機可讀存儲介質中存儲有計算機程序或指令,該計算機程序或指令被編程或配置以通過處理器執行所述風電場雙模式動態主動尾流控制方法。
95、此外,本發明還提供一種計算機程序產品,包括計算機程序或指令,該計算機程序或指令被編程或配置以通過處理器執行所述風電場雙模式動態主動尾流控制方法。
96、和現有技術相比,本發明主要具有以下優點:
97、1、本發明提供了一種適用于動態入流風速、考慮了風電機組動態特性的動態主動尾流控制方法,在考慮尾流效應的風電場運行優化控制中解決了尾流時間延遲的問題。
98、2、本發明在風電場“功率增效”模式下,相比于傳統方法能夠提高風電場的整體發電量,同時平衡風電場的疲勞載荷分布,抑制風電機組疲勞載荷的波動。
99、3、本發明在風電場“功率追蹤”模式下,相比于傳統方法能夠在風能充沛的條件下抑制風電機組的載荷波動,在風能匱乏的條件下提高風電場發電量實現更好的功率追蹤性能。
- 還沒有人留言評論。精彩留言會獲得點贊!