一種適用于部分均勻環境的自適應子空間檢測方法與系統
本發明屬于多通道信號檢測,具體涉及一種適用于部分均勻環境的自適應子空間檢測方法與系統。
背景技術:
1、隨著機載雷達技術水平的不斷提高、脈沖相干處理技術的發展,機載雷達可獲得多通道數據,并通過空時自適應檢測(space-time?adaptive?detection,stad)技術實現對目標信號的高效檢測。當前,在stad中應用最為廣泛的模型為子空間模型。在該模型中,信號的行元素和列元素均位于已知子空間中,但相對應的坐標未知。對于目標信號和干擾信號,兩者都可以通過子空間模型進行表征。
2、另外,在自適應檢測中,stad方法利用了不同通道中信號和噪聲的相關特性(即目標的空域信息),因此比傳統單通道信號檢測具有更優的檢測性能。然而,現有stad方法通常假定檢測背景是均勻的,即待檢測樣本與訓練樣本中噪聲的統計特性一致。在實際場景中,由于環境變化和雷達自身儀器問題等原因,待檢測樣本與訓練樣本兩者噪聲的統計特性往往有著巨大差異,嚴重影響檢測器的性能。一種常被用于描述環境非均勻性的模型為部分均勻環境模型,在該模型中,訓練樣本和待檢測樣本的協方差矩陣之間相差一個未知非均勻參數。
3、當前,對于部分均勻環境中的目標自適應檢測問題,主要為通過基于廣義似然比(generalized?likelihood?ratio?test,glrt)準則設計檢測器,這種glrt檢測器能在一定場景下獲得較好的檢測性能。然而,由于噪聲協方差矩陣、目標信號的子空間及子空間坐標均為未知,glrt檢測器不能在所有參數場景下均取得檢測優勢,開發新的子空間檢測極為必要。基于此考慮,本發明采用durbin準則設計了一種新的適用于部分均勻環境的自適應子空間檢測方法與系統,其目的在于提高機載雷達在部分均勻環境中的檢測性能,為stad技術的應用提供新的途徑。
技術實現思路
1、本發明的目的是提供一種適用于部分均勻環境的自適應子空間檢測方法與系統,其目的在于提高機載雷達在部分均勻環境中的檢測性能。
2、本發明采取的技術方案具體如下:
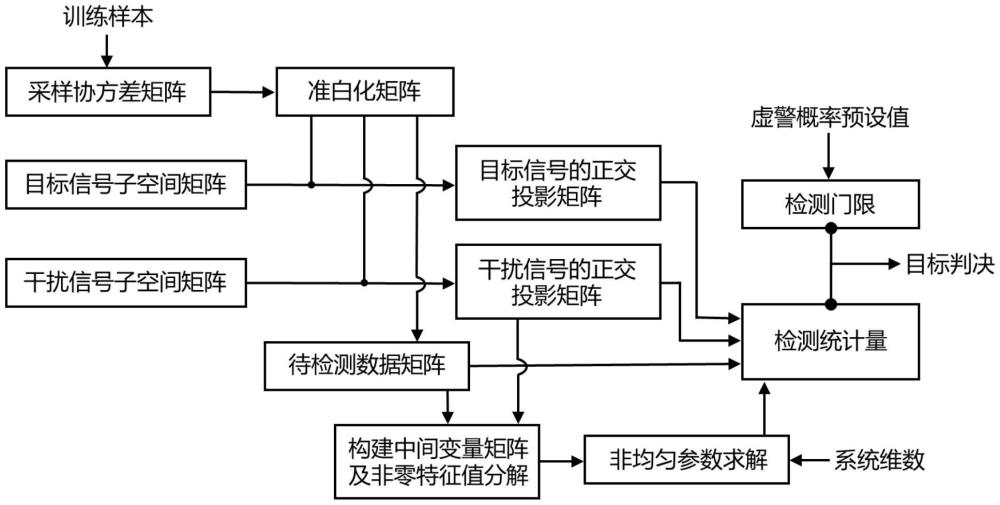
3、一種適用于部分均勻環境的自適應子空間檢測方法,包括以下步驟:
4、步驟1:構造目標信號子空間矩陣和干擾信號子空間矩陣,分別用矩陣a和j表示,矩陣的維數分別為n×p和n×q,其中(p+q)≤n,n表示系統通道數;
5、步驟2:利用訓練樣本構建采樣協方差矩陣s=yyh,其中y表示訓練樣本,符號(·)h表示共軛轉置;
6、步驟3:利用采樣協方差矩陣s構造準白化矩陣,然后通過其對目標信號子空間矩陣a、干擾信號子空間矩陣j和待檢測數據矩陣x進行準白化處理,分別得到白化矩陣和其中待檢測數據矩陣x的維數為n×k,k表示擴展維度;
7、步驟4:利用準白化矩陣構造目標信號的正交投影矩陣以及相應的補投影矩陣同時利用準白化矩陣構造干擾信號的正交投影矩陣以及相應的補投影矩陣
8、步驟5:利用所述準白化待檢測數據矩陣和干擾信號的正交投影矩陣構建中間變量矩陣及非零特征分解,并結合系統維數獲得非均勻參數σ2;
9、步驟6:利用準白化處理后的待檢測數據矩陣、目標信號的正交投影矩陣、干擾信號的正交投影矩陣和非均勻參數構造檢測統計量;
10、步驟7:利用虛警概率預設值確定檢測門限;
11、步驟8:比較所述檢測統計量與檢測門限的大小,并判定目標是否存在。
12、優選地,所述步驟1中,構造的目標信號矩陣a和干擾信號矩陣j均為列滿秩酉矩陣,且酉矩陣a和j線性獨立。
13、優選地,所述步驟3中,利用采樣協方差矩陣s構造的準白化矩陣對目標信號子空間矩陣a、干擾信號子空間矩陣j和待檢測數據矩陣x進行準白化處理,具體操作為和
14、優選地,所述步驟4中,利用準白化目標信號矩陣構造的正交投影矩陣和補投影矩陣分別表示為和其中(·)-1表示矩陣的逆,in為維數為n×n的單位矩陣;利用準白化干擾信號矩陣構造的正交投影矩陣和補投影矩陣分別表示為和
15、優選地,所述步驟5中,利用準白化待檢測數據矩陣和干擾信號的正交投影矩陣構建的中間變量為獲得非均勻參數為下面公式的解:
16、
17、其中,l為訓練樣本數,λi為的第i個非零特征值,r為非零特征值總個數。
18、優選地,所述步驟6中,利用準白化處理后的待檢測數據矩陣、目標信號的正交投影矩陣、干擾信號的正交投影矩陣和非均勻參數構造的檢測統計量表示為
19、
20、其中,ik為維數為k×k的單位矩陣,tr(·)表示矩陣的跡。
21、優選地,所述步驟7中,利用虛警概率預設值確定的檢測門限為
22、η=t(n)
23、其中,η表示檢測門限,n=[qμ],q為蒙特卡羅仿真次數,μ表示系統設定的虛警概率值,[·]表示取整操作,t(n)為序列
24、
25、由大到小排列時第n個最大值,為的共軛轉置矩陣,x(k)表示僅含干擾及熱噪聲分量的待檢測數據的第k次實現k=1,2,…,q。
26、優選地,所述步驟8中,比較檢測統計量與檢測門限的大小,以判定目標是否存在,分下述兩種情況進行判定:
27、若檢測統計量t大于或等于檢測門限η,則判定目標存在;
28、若檢測統計量t小于檢測門限η,則判定目標不存在。
29、一種適用于部分均勻環境的自適應子空間檢測系統,包括:
30、目標和干擾數據矩陣構造模塊:用于構造目標信號子空間矩陣和干擾信號子空間矩陣;
31、采樣協方差矩陣構造模塊:用于通過訓練樣本構造采樣協方差矩陣;
32、數據準白化模塊:用于對目標信號子空間矩陣、干擾信號子空間矩陣和待檢測數據矩陣進行準白化處理,分別得到準白化目標信號子空間矩陣、準白化干擾信號子空間矩陣和準白化待檢測數據矩陣;
33、正交投影矩陣構造模塊:用于通過準白化目標信號子空間矩陣、準白化干擾信號子空間矩陣分別構造目標信號的正交投影矩陣和干擾信號的正交投影矩陣;
34、非均勻參數求解模塊:用于通過對待檢測數據矩陣和干擾信號的正交投影矩陣構造的中間變量矩陣進行特征分解,然后聯合系統維數獲得環境的非均勻參數;
35、檢測統計量構造模塊:用于通過準白化目標信號矩陣、干擾信號正交投影矩陣、待檢測數據矩陣和環境非均勻參數構造檢測統計量;
36、檢測門限計算模塊:用于虛警概率預設值確定檢測門限;
37、目標判決模塊:用于比較所述檢測統計量與檢測門限的大小,并判定目標是否存在。
38、本發明取得的技術效果為:
39、本發明中,通過構造檢測統計量t,一體化地實現了干擾抑制、信號積累和目標檢測;
40、本發明中,通過利用采樣協方差矩陣s對待檢測數據矩陣、目標信號和干擾信號矩陣進行準白化處理,使得本發明所提出的檢測器具有恒虛警特性。
41、本發明可以解決部分均勻環境中的目標自適應檢測問題,與現有基于glrt準則的檢測方法相比,提高了雷達目標檢測性能。
- 還沒有人留言評論。精彩留言會獲得點贊!