一種密集高樓城區無人機配送路徑規劃方法
本發明屬于無人機路徑規劃,具體是一種密集高樓城區無人機配送路徑規劃方法。
背景技術:
1、公開號為cn117311384a的專利公開了一種無人機飛行路徑生成方法、裝置、電子設備及可讀存儲介質,應用于無人機技術領域。其中,方法包括根據待執行任務確定無人機的飛行參數,并基于飛行參數構建a星網格;調用a星優化算法基于a星網格進行全局避障,生成初始飛行路徑;通過對初始飛行路徑進行共線優化處理去除共線路徑點,得到初始優化飛行路徑;對初始優化飛行路徑進行多余拐點優化處理,得到無人機的目標飛行路徑。本申請能夠解決相關技術實用性較差的問題,能夠使用有限的計算資源生成無人機的最優飛行路徑。
2、但是,針對無人機路徑生成來說,尤其涉及到密集高樓層區的無人機配送,尤其是配送目的地不在地面,或者說存在一定高度時,也就是送到物品的地點存在一定的高度或者處于某一建筑內,涉及到若干個障礙,需要進行繞開,但是繞開會帶來路徑變長的問題,同步還會增大能耗,如何合理選擇合適的路徑,繞開部分密集區高樓,這是一個問題,基于此,提供一種解決方案。
技術實現思路
1、本發明旨在至少解決現有技術中存在的技術問題之一;為此,本發明提出了一種密集高樓城區無人機配送路徑規劃方法。
2、一種密集高樓城區無人機配送路徑規劃方法,該方法具體包括如下步驟:
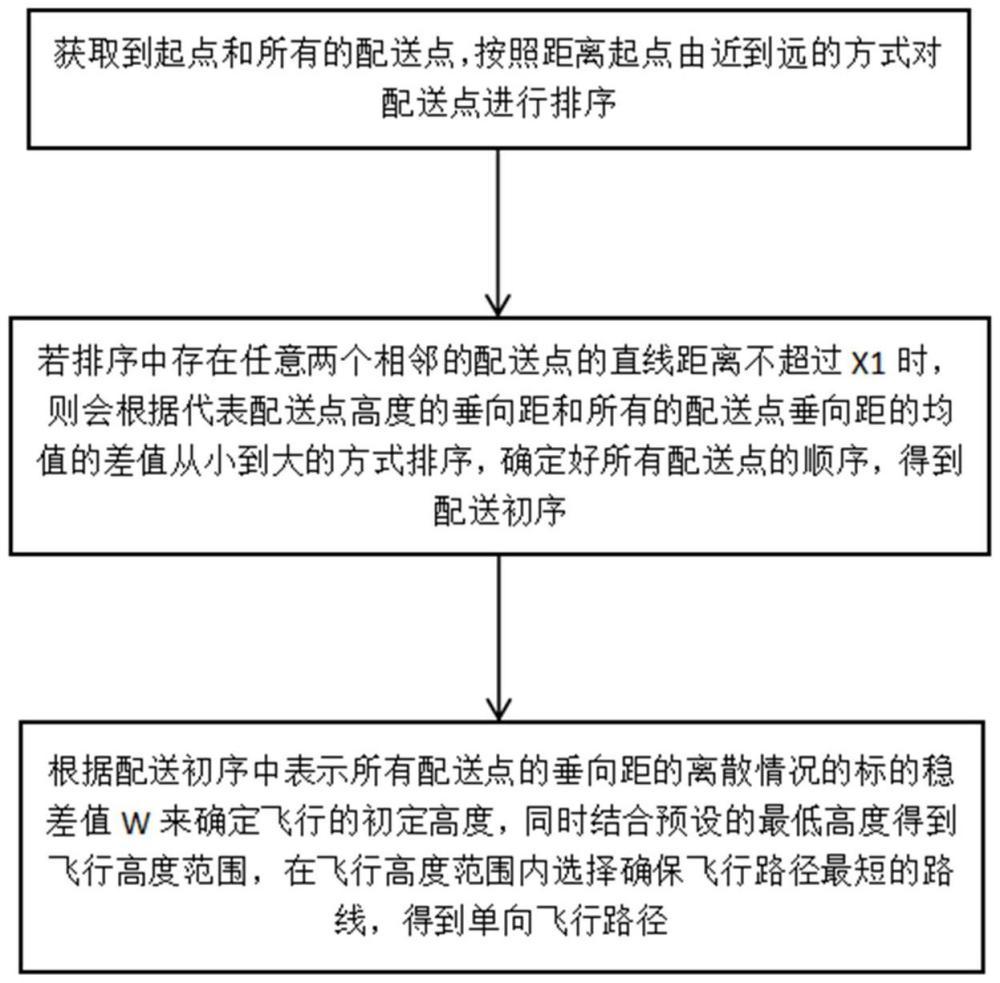
3、獲取到起點和所有的配送點,按照距離起點由近到遠的方式對配送點進行排序,若排序中存在任意兩個相鄰的配送點的直線距離不超過x1時,則會根據代表配送點高度的垂向距和所有的配送點垂向距的均值的差值從小到大的方式排序,確定好所有配送點的順序,得到配送初序;
4、根據配送初序中表示所有配送點的垂向距的離散情況的標的穩差值w來確定飛行的初定高度,同時結合預設的最低高度得到飛行高度范圍,在飛行高度范圍內選擇確保飛行路徑最短的路線,得到單向飛行路徑。
5、進一步地,標的穩差值通過下述方式獲取:
6、首先獲取到所有配送點的垂向距,將其標記為ci,i=1、...、n,同步獲取到均垂距并將其標記為p;
7、利用公式計算ci的穩差值w,具體計算公式為:
8、
9、進一步地,根據標的穩差值w來確定飛行的初定高度的具體方式為:
10、當w值不超過預設數值x1時,將ci中的最大高度和當前區域的飛行上限高度進行比較,將二者中的較小值設置為初定高度;
11、同時獲取到設定的無人機飛行最低高度,將最低高度到初定高度標記為飛行高度范圍。
12、進一步地,在飛行高度范圍內選擇確保飛行路徑最短的路線具體方式為:
13、將初定高度設置為無人機的飛行上限高度,然后自動獲取到從起點出發之后,依次到達配送初序中的配送點的最短飛行路徑,最短飛行路徑保證無人機的飛行高度不得超過飛行高度范圍;從而得到單向飛行路徑。
14、進一步地,當w值超過預設數值x1時,首先會獲取到在最短路徑且不考慮無人機飛行高度的這個設定下,無人機需要繞過的所有障礙高,將超過飛行上限高度的去除,剩余的按照高度從高到低的排序選出若干個上限高度,根據依次到達配送初序中的配送點的最短飛行路徑,最短飛行路徑保證無人機的飛行高度不得超過飛行高度范圍這個標準,得到若干個上限高度對應的飛行子路徑;
15、根據每一個飛行子路徑的飛行能耗和路徑長度去除量綱后進行加權,之后計算加權后飛行能耗和路徑長度的和值,將得到的標記為可選值,將可選值最小的飛行子路徑標記為單向飛行路徑。
16、進一步地,飛行能耗和路徑長度的加權計算中權值為管理員預設。
17、進一步地,飛行能耗和路徑長度的加權計算中權值通過下述方式確定:
18、獲取到滿足ci-p大于零的差值,將所有差值相加,得到的標識為上差和值;
19、獲取到滿足ci-p小于零的差值,將其取絕對值之后求和,得到的標記為下差和值;
20、當上差和值超過下差和值時,飛行能耗的權值設置為0.3,路徑長度的權值設置為0.7;否則將二者權值對調。
21、進一步地,確定完單向飛行路徑后,按照單向飛行路徑驅動無人機的飛行。
22、進一步地,無人機按照單向飛行路徑過程中的續航進行實時監控,當任意時刻出現續航不足設定閾值時,自動規劃最近的充電點,充電直到滿足能夠將貨物送到最后一個配送點且續航滿足到達最近的充電點進行充電。
23、與現有技術相比,本發明的有益效果是:
24、本申請根據配送初序中表示所有配送點的垂向距的離散情況的標的穩差值w來確定飛行的初定高度,同時結合預設的最低高度得到飛行高度范圍,在飛行高度范圍內選擇確保飛行路徑最短的路線;
25、這一過程中會兼顧需要繞開的密集高度的高度,同時會考慮升高高度的帶來的能耗,同步會考慮繞行高樓還是飛躍高樓路徑更短,這樣能夠規劃出更合理的飛行路徑。
技術特征:
1.一種密集高樓城區無人機配送路徑規劃方法,其特征在于,該方法具體包括如下步驟:
2.根據權利要求1所述的一種密集高樓城區無人機配送路徑規劃方法,其特征在于,標的穩差值通過下述方式獲取:
3.根據權利要求1所述的一種密集高樓城區無人機配送路徑規劃方法,其特征在于,根據標的穩差值w來確定飛行的初定高度的具體方式為:
4.根據權利要求3所述的一種密集高樓城區無人機配送路徑規劃方法,其特征在于,在飛行高度范圍內選擇確保飛行路徑最短的路線具體方式為:
5.根據權利要求2所述的一種密集高樓城區無人機配送路徑規劃方法,其特征在于,當w值超過預設數值x1時,首先會獲取到在最短路徑且不考慮無人機飛行高度的這個設定下,無人機需要繞過的所有障礙高,將超過飛行上限高度的去除,剩余的按照高度從高到低的排序選出若干個上限高度,根據依次到達配送初序中的配送點的最短飛行路徑,最短飛行路徑保證無人機的飛行高度不得超過飛行高度范圍這個標準,得到若干個上限高度對應的飛行子路徑;
6.根據權利要求5所述的一種密集高樓城區無人機配送路徑規劃方法,其特征在于,飛行能耗和路徑長度的加權計算中權值為管理員預設。
7.根據權利要求5所述的一種密集高樓城區無人機配送路徑規劃方法,其特征在于,飛行能耗和路徑長度的加權計算中權值通過下述方式確定:
8.根據權利要求1所述的一種密集高樓城區無人機配送路徑規劃方法,其特征在于,確定完單向飛行路徑后,按照單向飛行路徑驅動無人機的飛行。
9.根據權利要求8所述的一種密集高樓城區無人機配送路徑規劃方法,其特征在于,無人機按照單向飛行路徑過程中的續航進行實時監控,當任意時刻出現續航不足設定閾值時,自動規劃最近的充電點,充電直到滿足能夠將貨物送到最后一個配送點且續航滿足到達最近的充電點進行充電。
技術總結
本發明公開了一種密集高樓城區無人機配送路徑規劃方法,涉及無人機路徑規劃技術領域,根據配送初序中表示所有配送點的垂向距的離散情況的標的穩差值W來確定飛行的初定高度,同時結合預設的最低高度得到飛行高度范圍,在飛行高度范圍內選擇確保飛行路徑最短的路線;這一過程中會兼顧需要繞開的密集高度的高度,同時會考慮升高高度的帶來的能耗,同步會考慮繞行高樓還是飛躍高樓路徑更短,這樣能夠規劃出更合理的飛行路徑。
技術研發人員:郭述洋,杭蓋,張一純,周小勇,黃銳,李昊,關燕楠
受保護的技術使用者:桂林航天工業學院
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!