一種振沖造孔智能定位導航方法及應用與流程
本發明涉及導航領域,特別涉及一種振沖造孔智能定位導航方法及應用。
背景技術:
1、現有振沖作業的作業方式是通過將位于造孔點外的移動端移動到造孔點位停止后,移動端承載的振沖器在牽放機構的作用下,下降到振沖作業目標作業點后立即開始造孔,導航過程(移動、下降)及造孔過程均通過移動端的電腦控制,其中,移動過程中的導航通過在移動端的支架上安裝gps傳感器實現。
2、現有振沖作業的作業方式存在以下的不足之處:
3、(1)移動端上的振沖器因其作業的特殊性,從移動到造孔作業開始前,振沖器需要上下移動,從而振沖器需要通過牽放機構進行上下移動,因此振沖器需要與牽放機構連接,其中一種較為通常的連接方式為牽引繩,即將振沖器懸掛在牽引繩,而牽引繩在移動、下落過程中由于各種因素(如自然因素或牽引力大小等)可能引起振沖器的豎向軸線與牽引繩的豎向軸線并不重合(現有安裝在支架上的gps傳感器檢測點是以牽引繩的豎向軸線為基準點,而該點作業時與目標造孔點的連線為豎直線),從而導致作業后所造的孔產生偏移。
4、(2)導航過程及造孔過程相互獨立,相互無交集,形成信息孤島
5、上述背景技術是為了便于理解本發明,并非是申請本發明之前已向普通公眾公開的公知技術。
技術實現思路
1、針對上述缺陷,本發明提供一種,其旨在改善背景技術提到的至少一種問題。
2、技術方案是:一種振沖造孔智能定位導航方法,包括:
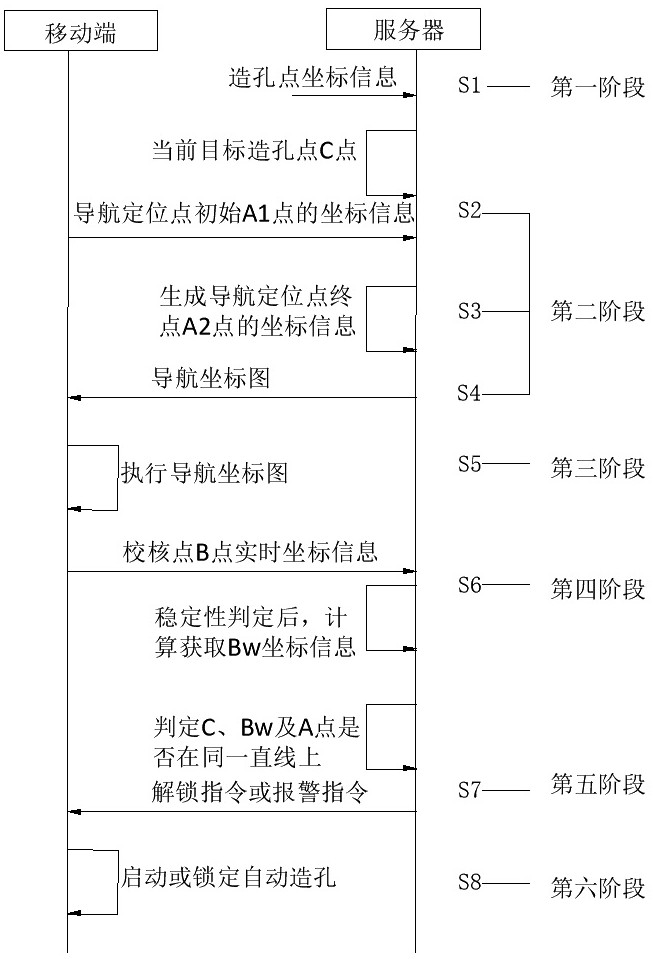
3、s1,在第一階段,標定n個目標造孔點并確立n個造孔點的坐標信息,服務器接收儲存n個目標造孔點的坐標信息;
4、s2,在第二階段,服務器從n個目標造孔點中確定1個目標造孔點為當前目標造孔點c點,接收移動端的導航定位點初始a1點的坐標信息;
5、s3,在第二階段,服務器根據當前目標造孔點c點的坐標信息和導航定位點初始a1點的坐標信息生成導航定位點終點a2點的坐標信息;
6、s4,?在第二階段,服務器根據導航定位點初始a1點的坐標信息及導航定位點終點a2點的坐標信息生成導航坐標圖并將該導航坐標圖傳送到移動端;
7、s5,?在第三階段,移動端執行該導航坐標圖,使導航定位點實時a點由導航定位點初始a1點移動到導航定位點終點a2點處,停止移動;
8、s6,?在第四階段,服務器開始接收校核點b點實時坐標信息,計算校核點b點實時坐標信息的穩定性,若計算的穩定性≤閾值,繼續計算,直到計算的穩定性>閾值時,取校核點b點實時坐標信息,記為bw;
9、s7,?在第五階段,根據當前目標造孔點c點的坐標信息、bw、導航定位點實時a點,判定當前目標造孔點c點、bw及導航定位點實時a點是否在同一直線上,如是,則發出解鎖指令,如否,輸出報警指令;
10、s8,?在第六階段,移動端接受解鎖指令后啟動自動造孔程序,移動端接受報警指令后鎖定自動造孔程序。
11、其中,x為水平橫坐標軸,y為水平縱坐標軸,z為豎直坐標軸,當前目標造孔點c點坐標信息為xc,yc,zc;導航定位點終點a2坐標xa2,ya2,za2,bw坐標信息為xbw,ybw,zbw,?n為大于3的自然數。
12、進一步地,s7中,判定是否在同一直線上的判定方法為:
13、xc=xa2,?yc=ya2,如xbw-xc=0,?ybw-yc=0,則在同一直線,如xbw-xc≠0或?ybw-yc≠≠0,則不在同一直線。
14、進一步地,還包括s9,s9包括:重復s2-s8,?s2中,服務器從n個目標造孔點中確定另1個目標造孔點為當前目標造孔點c點。
15、進一步地,所述振沖造孔為懸索式振沖造孔。
16、進一步地,所述導航定位點的傳感器設置在移動端的機架上,校核點b點的傳感器設置在移動端的振沖器的中心出水口內,位于振沖器的主軸的軸線上。
17、進一步地,s8中,自動造孔程序包括:
18、s81,下落階段;
19、s82,造孔階段;
20、其中,下落階段中,當移動端的振沖器的底面d距離目標造孔點c點10~20cm時,停止移動,服務器開始重新接收校核點b點實時坐標信息,計算校核點b點實時坐標信息的穩定性,若計算的穩定性≤閾值,繼續計算,直到計算的穩定性>閾值時,取校核點b點實時坐標信息,記為bw1,判定當前目標造孔點c點、bw1及導航定位點實時a點是否在同一直線上,如是,則發出轉s82指令,如否,輸出報警指令,移動端接收指令后,轉s82或啟動鎖定程序;
21、其中,bw1坐標信息為xbw1,ybw1,zbw1。
22、進一步地,s81中,判定是否在同一直線上的判定方法為:
23、xc=xa2,?yc=ya2,如xbw1-xc=0,?ybw1-yc=0則在同一直線,如xbw1-xc≠0,?ybw1-yc≠0,則不在同一直線。
24、進一步地,s6或s81中,穩定性定義為穩定度wd,閾值定義為wd閾值,?wd的計算公式為:
25、wd=1/k;
26、k?=(xi+1-?xi)2+?(yi+1-?yi)2+(zi+1-?zi)2;
27、wd>wd閾值;
28、其中,xi+1、yi+1、zi+1為校核點b點實時坐標信息,xi、yi、zi為校核點b點前一時刻坐標信息。
29、本發明還提供一種電子設備。
30、技術方案是:一種電子設備,包括存儲器、處理器及存儲在存儲器上并可在處理器上運行的計算機程序,所述處理器執行所述程序時實現如上述的振沖造孔智能定位導航方法的步驟。
31、發明還提供一種計算機可讀存儲介質。
32、技術方案是:一種計算機可讀存儲介質,其上存儲有計算機程序,該計算機程序被處理器執行時實現如上述的振沖造孔智能定位導航方法的步驟。
33、與現有技術相比,本發明的有益效果在于:
34、(1)本發明通過導航定位點終點a’生成導航坐標圖,導航信息更為明確,導航信息更準確。
35、(2)本發明通過bw檢測目標造孔點是否在振沖器的中心線上,排除造孔前各種因素(如自然因素或牽引力大小等)導致的目標造孔點不在振沖器的中心線而導致的造孔偏移。
36、(3)本發明新增服務器監測移動端導航及造孔,將原本相互獨立的導航及造孔聯系起來,避免信息孤島。
技術特征:
1.一種振沖造孔智能定位導航方法,其特征在于,包括:
2.根據權利要求1所述的振沖造孔智能定位導航方法,其特征在于,s7中,判定是否在同一直線上的判定方法為:
3.?根據權利要求1所述的振沖造孔智能定位導航方法,其特征在于,s8后,還包括s9,s9包括:重復s2-s8,?s2中,服務器從n個目標造孔點中確定另1個目標造孔點為當前目標造孔點c點。
4.根據權利要求1所述的振沖造孔智能定位導航方法,其特征在于,所述振沖造孔為懸索式振沖造孔。
5.根據權利要求4所述的振沖造孔智能定位導航方法,其特征在于,所述導航定位點的傳感器設置在移動端的機架上,校核點b點的傳感器設置在移動端的振沖器的中心出水口內,位于振沖器的主軸的軸線上。
6.根據權利要求1所述的振沖造孔智能定位導航方法,其特征在于,s8中,自動造孔程序包括:
7.根據權利要求6所述的振沖造孔智能定位導航方法,其特征在于,s81中,判定是否在同一直線上的判定方法為:
8.?根據權利要求6所述的振沖造孔智能定位導航方法,其特征在于,s6或s81中,穩定性定義為穩定度wd,閾值定義為wd閾值,?wd的計算公式為:
9.一種電子設備,包括存儲器、處理器及存儲在存儲器上并可在處理器上運行的計算機程序,其特征在于,所述處理器執行所述程序時實現如權利要求1至8任一項所述的振沖造孔智能定位導航方法的步驟。
10.一種計算機可讀存儲介質,其上存儲有計算機程序,其特征在于,該計算機程序被處理器執行時實現如權利要求1至8任一項所述的振沖造孔智能定位導航方法的步驟。
技術總結
本發明公開了一種振沖造孔智能定位導航方法及應用,屬于導航領域,包括:S1,標定N個目標造孔點并確立N個造孔點的坐標信息,服務器接收儲存N個目標造孔點的坐標信息;S2,確定1個目標造孔點為當前目標造孔點C點,接收移動端的導航定位點初始A1點的坐標信息;S3,生成導航定位點終點A2點的坐標信息;S4,生成導航坐標圖;S5,移動端執行導航坐標圖;S6,接收校核點B點實時坐標信息,計算穩定性;S7,判定當前目標造孔點C點、Bw及導航定位點實時A點是否在同一直線上;S8,移動端接受解鎖指令后啟動自動造孔程序,移動端接受報警指令后鎖定自動造孔程序。本發明解決了造孔偏移的問題。
技術研發人員:陳濤,盧偉,李萌,馬科,蒲平新,魏小令,梁興龍,梁存紹,溫哲昊,高強,邱鴻志,黃宏慶
受保護的技術使用者:四川華能瀘定水電有限公司
技術研發日:
技術公布日:2025/3/10
- 還沒有人留言評論。精彩留言會獲得點贊!