基于機(jī)動(dòng)平臺(tái)的視頻SAR快速成像方法及系統(tǒng)
本發(fā)明涉及雷達(dá)成像,特別涉及一種基于機(jī)動(dòng)平臺(tái)的視頻sar快速成像方法及系統(tǒng)。
背景技術(shù):
1、視頻合成孔徑雷達(dá)(video?synthetic?aperture?radar,visar)是一種先進(jìn)的雷達(dá)成像技術(shù),結(jié)合了傳統(tǒng)sar的高分辨率成像能力與視頻監(jiān)控的連續(xù)性優(yōu)點(diǎn)。它通過對(duì)目標(biāo)區(qū)域進(jìn)行連續(xù)觀測(cè),可以生成序列幀圖像,實(shí)現(xiàn)對(duì)地面或目標(biāo)的動(dòng)態(tài)變化監(jiān)控。機(jī)動(dòng)平臺(tái)sar構(gòu)型靈活,通常處于大斜視情況,與視頻sar結(jié)合,可以大大提升機(jī)動(dòng)平臺(tái)的目標(biāo)探測(cè)能力。因此,與傳統(tǒng)sar只能獲取靜態(tài)圖像不同,機(jī)動(dòng)平臺(tái)視頻sar能夠捕捉目標(biāo)的運(yùn)動(dòng)信息,在災(zāi)害監(jiān)測(cè)、交通管理等領(lǐng)域具有廣泛應(yīng)用。
2、現(xiàn)有機(jī)動(dòng)平臺(tái)視頻sar成像方法主要有兩大類:頻域算法和時(shí)域算法。頻域算法中,pfa算法是早期提出的用于成像頻域的方法,隨后被廣泛應(yīng)用于sar成像。其特點(diǎn)是利用快速傅里葉變換在波數(shù)域中進(jìn)行高效聚焦,但它基于平面波假設(shè),限制了成像場(chǎng)景的范圍。其他頻域算法,如rda、rma、csa等可以適用于不同的成像需求,尤其是在復(fù)雜場(chǎng)景下具有更高的適應(yīng)性和操作靈活性,但這些算法大都基于雷達(dá)平臺(tái)直飛的模式下。時(shí)域算法可以適應(yīng)任意軌跡,包括傳統(tǒng)反投影算法、遞歸反投影算法、快速因式分解反向投影算法,傳統(tǒng)反投影算法具有高精度但計(jì)算復(fù)雜度極高;遞歸反投影算法存在誤差積累局限性;用于視頻sar成像的快速因式分解反向投影算法將成像場(chǎng)景劃分為興趣區(qū)域(roi)和一般區(qū)域(gr),在不同區(qū)域采用不同的孔徑長(zhǎng)度進(jìn)行成像,從而提升roi區(qū)的分辨率,同時(shí)通過遞歸方法降低了視頻sar成像的計(jì)算復(fù)雜度,但在處理大規(guī)模數(shù)據(jù)時(shí)計(jì)算負(fù)擔(dān)依然存在。
3、因此,目前的機(jī)動(dòng)平臺(tái)視頻sar成像方法無(wú)法同時(shí)實(shí)現(xiàn)快速的高分辨和高幀率的成像。
技術(shù)實(shí)現(xiàn)思路
1、有鑒于此,本發(fā)明的目的在于提供一種基于機(jī)動(dòng)平臺(tái)的視頻sar快速成像方法及系統(tǒng),旨在解決現(xiàn)有技術(shù)中視頻sar成像方法無(wú)法同時(shí)實(shí)現(xiàn)快速的高分辨和高幀率的成像。
2、本發(fā)明的一個(gè)目的在于提供一種基于機(jī)動(dòng)平臺(tái)的視頻sar快速成像方法,所述方法包括:
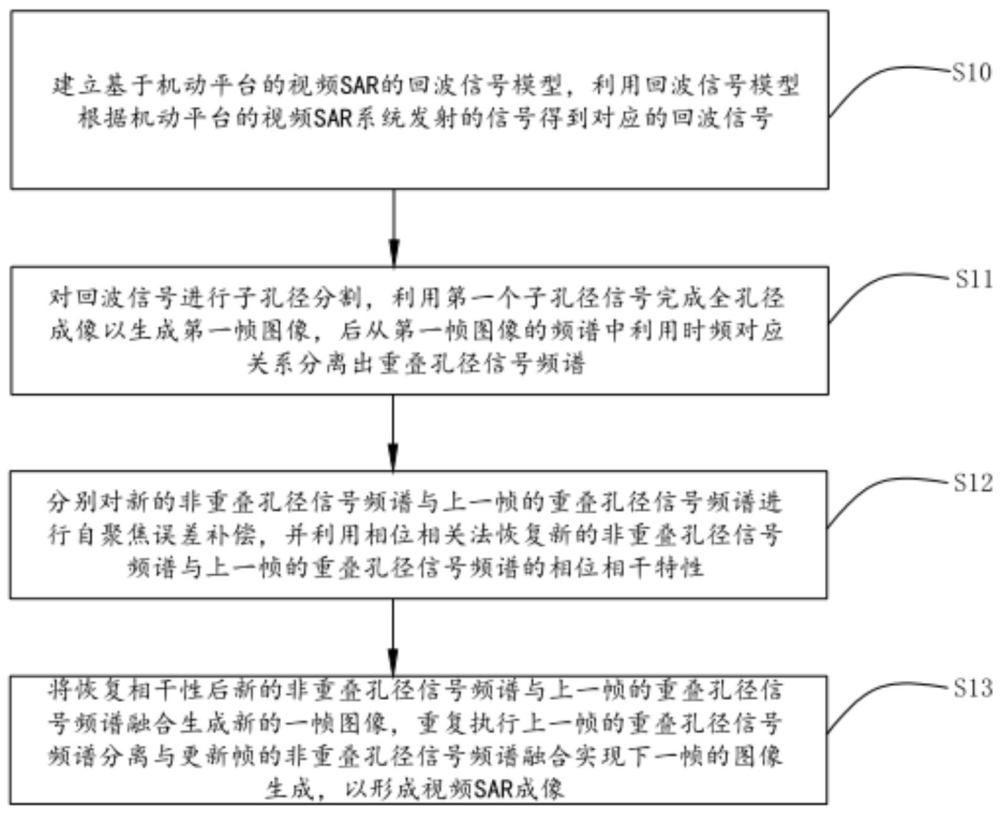
3、建立基于機(jī)動(dòng)平臺(tái)的視頻sar的回波信號(hào)模型,利用回波信號(hào)模型根據(jù)機(jī)動(dòng)平臺(tái)的視頻sar系統(tǒng)發(fā)射的信號(hào)得到對(duì)應(yīng)的回波信號(hào);
4、對(duì)回波信號(hào)進(jìn)行子孔徑分割,利用第一個(gè)子孔徑信號(hào)完成全孔徑成像以生成第一幀圖像,后從第一幀圖像的頻譜中利用時(shí)頻對(duì)應(yīng)關(guān)系分離出重疊孔徑信號(hào)頻譜;
5、分別對(duì)新的非重疊孔徑信號(hào)頻譜與上一幀的重疊孔徑信號(hào)頻譜進(jìn)行自聚焦誤差補(bǔ)償,并利用相位相關(guān)法恢復(fù)新的非重疊孔徑信號(hào)頻譜與上一幀的重疊孔徑信號(hào)頻譜的相位相干特性;
6、將恢復(fù)相干性后新的非重疊孔徑信號(hào)頻譜與上一幀的重疊孔徑信號(hào)頻譜融合生成新的一幀圖像,重復(fù)執(zhí)行上一幀的重疊孔徑信號(hào)頻譜分離與更新幀的非重疊孔徑信號(hào)頻譜融合實(shí)現(xiàn)下一幀的圖像生成,以形成視頻sar成像。
7、進(jìn)一步的,上述基于機(jī)動(dòng)平臺(tái)的視頻sar快速成像方法,其中,所述對(duì)回波信號(hào)進(jìn)行子孔徑分割,利用第一個(gè)子孔徑信號(hào)完成全孔徑成像以生成第一幀圖像,后從第一幀圖像的頻譜中利用時(shí)頻對(duì)應(yīng)關(guān)系分離出重疊孔徑信號(hào)頻譜的步驟包括:
8、利用預(yù)設(shè)的重疊幀率進(jìn)行子孔徑分割,重疊幀率表示為;
9、;
10、其中,表示方位分辨率,表示載頻,表示平臺(tái)等效速度,表示中心波束斜視角,表示最短斜距,表示重疊率, c表示光速;
11、基于駐定相位原理,將第一個(gè)子孔徑信號(hào)通過傅里葉變換以變換到距離頻域,采用gcbp算法將接收的第一個(gè)子孔徑信號(hào)進(jìn)行成像處理,得到第一幀圖像的信號(hào)表示形式:
12、;
13、其中,場(chǎng)景中存在任意點(diǎn),為積分變量代換引入的雅可比行列式,和分別表示方位向和距離向波數(shù)矢量的大小, j表示虛數(shù)單位;
14、利用預(yù)設(shè)的頻譜空變校正函數(shù)對(duì)第一幀圖像進(jìn)行校正得到圖像二維頻譜,后從第一幀圖像的圖像二維頻譜中利用時(shí)頻對(duì)應(yīng)關(guān)系分離出重疊孔徑信號(hào)頻譜。
15、進(jìn)一步的,上述基于機(jī)動(dòng)平臺(tái)的視頻sar快速成像方法,其中,頻譜空變校正函數(shù)表達(dá)式為:
16、;
17、其中, j表示虛數(shù)單位,、和分別表示子孔徑中心方位時(shí)刻對(duì)應(yīng)方位位置、距離位置以及高度,表示波束矢量中心,表示載波頻率的波長(zhǎng),表示第一步頻譜校正后的目標(biāo)的距離頻譜,表示目標(biāo)的距離頻譜,表示目標(biāo)的距離頻譜中心,表示場(chǎng)景距離中心;
18、經(jīng)過第一步頻譜校正后,利用平移函數(shù)對(duì)頻譜進(jìn)行距離和方位的平移,其中,平移函數(shù)表示為:
19、;
20、其中,和分別表示校正后的方位、距離頻譜,為斜視角。
21、進(jìn)一步的,上述基于機(jī)動(dòng)平臺(tái)的視頻sar快速成像方法,其中,所述從第一幀圖像的圖像二維頻譜中利用時(shí)頻對(duì)應(yīng)關(guān)系分離出重疊孔徑信號(hào)頻譜的步驟包括:
22、通過確立的成像場(chǎng)景的中心坐標(biāo)對(duì)應(yīng)的直角坐標(biāo)系下方位頻譜和距離頻譜,計(jì)算出譜寬,表示為:
23、;
24、其中,和表示展寬系數(shù);
25、通過譜寬計(jì)算出網(wǎng)格點(diǎn)對(duì)應(yīng)頻譜:
26、;
27、其中,和分別表示方位和距離分辨率,和分別為子孔徑圖像的距離譜和方位譜的中心頻率點(diǎn),為方位網(wǎng)格頻譜,為距離網(wǎng)格頻譜;
28、時(shí)頻對(duì)應(yīng)關(guān)系為任意方位時(shí)刻與方位網(wǎng)格頻譜的對(duì)應(yīng)關(guān)系,表示為:
29、;
30、其中,表示成像場(chǎng)景的中心坐標(biāo),表示任意方位時(shí)刻的有效發(fā)射頻率,表示任意方位時(shí)刻的距離網(wǎng)格點(diǎn)對(duì)應(yīng)頻率,表示任意方位時(shí)刻對(duì)應(yīng)的孔徑方位位置,表示瞬時(shí)理想天線相位中心到目標(biāo)的瞬時(shí)斜距;
31、基于頻譜先進(jìn)先出,利用滿足視頻sar幀率和高分辨率的孔徑重疊率,計(jì)算出非重疊孔徑起始方位時(shí)間和結(jié)束方位時(shí)間對(duì)應(yīng)的頻譜網(wǎng)格位置區(qū)間,將頻譜網(wǎng)格位置區(qū)間內(nèi)圖像頻譜部分從中分離以分離出重疊孔徑信號(hào)頻譜。
32、進(jìn)一步的,上述基于機(jī)動(dòng)平臺(tái)的視頻sar快速成像方法,其中,所述分別對(duì)新的非重疊孔徑信號(hào)頻譜與上一幀的重疊孔徑信號(hào)頻譜進(jìn)行自聚焦誤差補(bǔ)償,并利用相位相關(guān)法恢復(fù)新的非重疊孔徑信號(hào)頻譜與上一幀的重疊孔徑信號(hào)頻譜的相位相干特性的步驟包括:
33、通過時(shí)頻對(duì)應(yīng)關(guān)系提取新的非重疊孔徑信號(hào)對(duì)應(yīng)的頻譜與上一幀的重疊孔徑信號(hào)的頻譜,將頻譜和頻譜搬移到相同的頻譜中心;
34、通過計(jì)算頻譜和頻譜之間的互功率譜,并進(jìn)行逆傅里葉變換,定位脈沖峰值位置獲得孔徑段圖像之間的偏移量,隨后在圖像的頻域內(nèi)應(yīng)用線性相位乘法來(lái)實(shí)現(xiàn)圖像在空間上的對(duì)齊以恢復(fù)新的非重疊孔徑信號(hào)頻譜與上一幀的重疊孔徑信號(hào)頻譜的相位相干特性。
35、進(jìn)一步的,上述基于機(jī)動(dòng)平臺(tái)的視頻sar快速成像方法,其中,所述將恢復(fù)相干性后新的非重疊孔徑信號(hào)頻譜與上一幀的重疊孔徑信號(hào)頻譜融合生成新的一幀圖像的步驟包括:
36、將新的非重疊孔徑信號(hào)頻譜與上一幀的重疊孔徑信號(hào)頻譜分別做二維逆傅里葉變換轉(zhuǎn)換到時(shí)域,在時(shí)域分別乘以相位,使得搬移至下一幀孔徑的中心頻率位置,再轉(zhuǎn)換到頻域?qū)崿F(xiàn)相加融合,隨后進(jìn)行二維逆傅里葉變換生成新的一幀圖像;
37、其中,的表達(dá)式為:
38、
39、其中, j表示虛數(shù)單位,表示波束矢量中心,表示載波頻率的波長(zhǎng),、和分別表示第幀孔徑方位時(shí)刻對(duì)應(yīng)方位位置、距離位置以及高度。
40、進(jìn)一步的,上述基于機(jī)動(dòng)平臺(tái)的視頻sar快速成像方法,其中,所述建立基于機(jī)動(dòng)平臺(tái)的視頻sar的回波信號(hào)模型,利用回波信號(hào)模型根據(jù)機(jī)動(dòng)平臺(tái)的視頻sar系統(tǒng)發(fā)射的信號(hào)得到對(duì)應(yīng)的回波信號(hào)的步驟包括:
41、機(jī)動(dòng)平臺(tái)的視頻sar系統(tǒng)發(fā)射的信號(hào),經(jīng)過解調(diào)和距離壓縮后,得到的對(duì)應(yīng)的回波信號(hào)表示為:
42、;
43、其中,表示距離快時(shí)間,表示方位慢時(shí)間,表示信號(hào)帶寬,表示載波頻率的波長(zhǎng),表示光速,表示目標(biāo)的方位角窗口,表示瞬時(shí)理想天線相位中心到目標(biāo)的瞬時(shí)斜距, j表示虛數(shù)單位。
44、本發(fā)明的另一個(gè)目的在于提供一種基于機(jī)動(dòng)平臺(tái)的視頻sar快速成像系統(tǒng),所述系統(tǒng)包括:
45、獲取模塊,用于建立基于機(jī)動(dòng)平臺(tái)的視頻sar的回波信號(hào)模型,利用回波信號(hào)模型根據(jù)機(jī)動(dòng)平臺(tái)的視頻sar系統(tǒng)發(fā)射的信號(hào)得到對(duì)應(yīng)的回波信號(hào);
46、分割模塊,用于對(duì)回波信號(hào)進(jìn)行子孔徑分割,利用第一個(gè)子孔徑信號(hào)完成全孔徑成像以生成第一幀圖像,后從第一幀圖像的頻譜中利用時(shí)頻對(duì)應(yīng)關(guān)系分離出重疊孔徑信號(hào)頻譜;
47、補(bǔ)償模塊,用于分別對(duì)新的非重疊孔徑信號(hào)頻譜與上一幀的重疊孔徑信號(hào)頻譜進(jìn)行自聚焦誤差補(bǔ)償,并利用相位相關(guān)法恢復(fù)新的非重疊孔徑信號(hào)頻譜與上一幀的重疊孔徑信號(hào)頻譜的相位相干特性;
48、成像模塊,用于將恢復(fù)相干性后新的非重疊孔徑信號(hào)頻譜與上一幀的重疊孔徑信號(hào)頻譜融合生成新的一幀圖像,重復(fù)執(zhí)行上一幀的重疊孔徑信號(hào)頻譜分離與更新幀的非重疊孔徑信號(hào)頻譜融合實(shí)現(xiàn)下一幀的圖像生成,以形成視頻sar成像。
49、本發(fā)明的另一個(gè)目的在于提供一種可讀存儲(chǔ)介質(zhì),其上存儲(chǔ)有計(jì)算機(jī)程序,所述程序被處理器執(zhí)行時(shí)實(shí)現(xiàn)上述的方法的步驟。
50、本發(fā)明的另一個(gè)目的在于提供一種電子設(shè)備,包括存儲(chǔ)器、處理器以及存儲(chǔ)在存儲(chǔ)器上并在處理器上運(yùn)行的計(jì)算機(jī)程序,所述處理器執(zhí)行所述程序時(shí)實(shí)現(xiàn)上述的方法的步驟。
51、本發(fā)明通過時(shí)頻對(duì)應(yīng)關(guān)系對(duì)頻譜進(jìn)行分離與融合,在頻譜融合前,對(duì)兩部分信號(hào)進(jìn)行自聚焦誤差補(bǔ)償,以消除相位誤差對(duì)成像的影響;誤差補(bǔ)償后,利用重疊部分的頻譜進(jìn)行相位相關(guān)處理以恢復(fù)相干特性,有效減少成像中的不連續(xù)性和散焦現(xiàn)象,從而保證高幀率、高分辨率的圖像聚焦良好且穩(wěn)定輸出,而利用連續(xù)幀圖像之間的關(guān)聯(lián)特性提升時(shí)域快速成像效率,在頻域?qū)崿F(xiàn)了“滑動(dòng)”更新,從而避免了圖像域的插值操作帶來(lái)的運(yùn)算量,實(shí)現(xiàn)了快速的高幀率、高分辨率的成像。解決了現(xiàn)有技術(shù)中無(wú)法同時(shí)實(shí)現(xiàn)快速的高幀率、高分辨率的成像。
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!