一種基于太陽能發電的自動駕駛無人機運輸系統的制作方法
本發明涉及無人機及,具體是指一種基于太陽能發電的自動駕駛無人機運輸系統。
背景技術:
1、隨著電子技術和自動控制技術的不斷進步,無人機(unmanned?aerial?vehicle,uav)在物流配送、農業監測、應急救援及城市交通監控等多領域發揮著日益重要的作用。然而,目前常見的商用和工業級無人機大多依賴傳統鋰電池或燃油動力作為主要能源來源,受限于電池容量或燃料重量,其續航時間和載重能力難以同時滿足長距離、長時間的運輸需求。
2、為了延長無人機的續航時間并降低對地面充電或加油的依賴,業界逐漸探索將太陽能發電技術應用于無人機領域。例如,在高空長航時無人機中,通過將固定翼機身表面鋪設太陽能電池,可以在白天獲取一定的清潔能源;在部分多旋翼無人機中,也有嘗試在機身或槳葉上集成太陽能薄膜電池以補充電能。但由于飛行姿態多變、光照條件不穩定以及無人機本身可利用面積有限,這些嘗試往往難以取得顯著的能源補給效果。加之傳統太陽能發電系統與無人機飛控系統在功率管理和控制策略上尚未建立有效的協同機制,容易出現發電效率低、儲能利用率不足或飛行安全性無法保障等問題。
3、另一方面,自動駕駛技術正快速與無人機平臺結合,通過在無人機上搭載高精度傳感器、導航模塊和智能算法,使無人機實現自主路徑規劃、障礙物檢測與規避以及多機協同作業等功能。然而,在光照不足或飛行負載驟增時,若無法對發電和儲能進行準確管理與調配,就會導致電力供應不足,進而影響無人機的任務執行穩定性與飛行安全。
技術實現思路
1、根據本發明的實施例,提供了一種基于太陽能發電的自動駕駛無人機運輸系統。用于解決上述背景技術所提出的問題。
2、在本發明的第一方面,提供了一種基于太陽能發電的自動駕駛無人機運輸系統。
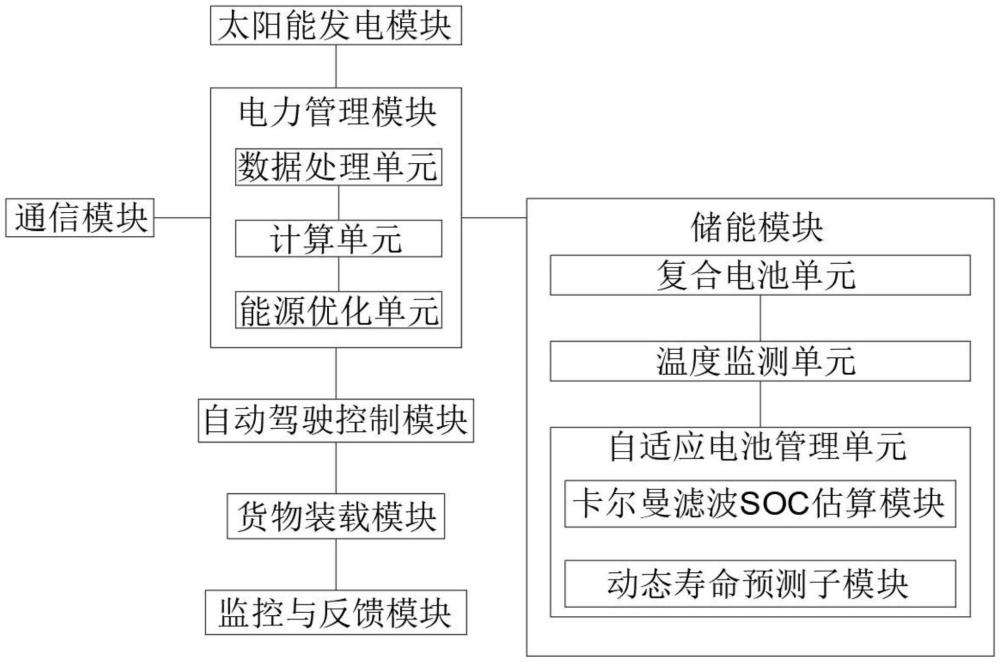
3、該基于太陽能發電的自動駕駛無人機運輸系統包括:太陽能發電模塊,用于收集并轉換太陽能為電能;
4、電力管理模塊,與所述太陽能發電模塊連接,用于調節和分配電能;
5、儲能模塊,連接至所述電力管理模塊,用于存儲多余的電能;
6、自動駕駛控制模塊,與所述電力管理模塊和導航模塊連接,用于實現無人機的自主飛行控制。
7、優選的,該系統還包括:
8、貨物裝載模塊,與所述自動駕駛控制模塊連接,用于裝載和管理運輸貨物;
9、通信模塊,與所述自動駕駛控制模塊連接,用于實現系統內各模塊之間及與外部控制中心的通信;
10、監控與反饋模塊,與所述通信模塊連接,用于實時監控系統狀態并反饋控制指令。
11、優選的,所述電力管理模塊包括:
12、數據處理單元,用于實時采集所述太陽能發電模塊和所述儲能模塊的工作參數,并將所述工作參數轉換成可供控制算法調用的數據格式;
13、計算單元,與所述數據處理單元通信,用于根據所述工作參數執行最大功率點追蹤計算并輸出發電功率估計結果;
14、能源優化單元,與所述計算單元連接,用于在獲取計算單元的最大功率點追蹤結果后,基于自動駕駛控制和儲能需求,動態分配能量。
15、優選的,所述計算單元計算流程如下:
16、獲取瞬時電壓v和瞬時電流i構成的采樣序列{(vt,it)|t=1,2,...};
17、通過下式對相鄰時刻功率變化進行增量電導運算:
18、δi=it-it-1,δv=vt-vt-1
19、當時,判定所述太陽能發電模塊工作在或接近最大功率點;
20、若則調高所述太陽能發電模塊的工作電壓;
21、若則降低所述太陽能發電模塊的工作電壓;
22、根據調整結果更新當前時刻的最大功率估計值pmppt;
23、其計算公式為pmppt=vt×it×ηadj;其中,ηadj為根據瞬態條件自適應調整的功率修正系數;
24、能源優化單元根據計算單元輸出的最大功率估計值及當前系統總功率需求pdemand和儲能模塊狀態soc;構建以下優化目標:
25、
26、在滿足ec+es≤pmppt的約束下進行求解;
27、ec表示表示分配給自動駕駛控制模塊的電能;es表示在本時刻為儲能模塊分配的充電電能;uc(·)為針對自動駕駛控制所設定的效用函數,用以量化無人機執行任務過程中對足額電能的需求滿足程度;us(·,soc)為儲能效用函數,綜合考慮儲能模塊的健康度以及預期后續使用需求;λ為平衡自動駕駛控制需求與儲能c要性權重系數。
28、優選的,所述儲能模塊包括:
29、復合電池單元,采用多級串并連接的鋰離子動力電池與超級電容相結合的結構;
30、溫度監測單元,用于實時監測所述復合電池單元的溫度分布;
31、自適應電池管理單元,與所述電力管理模塊通信,用于根據所述自動駕駛控制模塊的任務需求和所述復合電池單元的荷電狀態和健康狀態(soh)參數,動態調整充放電策略并進行故障預測。
32、優選的,所述自適應電池管理單元包括:
33、卡爾曼濾波soc估算模塊,用于綜合所述復合電池單元的終端電壓、放電電流、溫度及歷史工作數據,估算并動態修正儲能模塊的荷電狀態,以減少環境變化或傳感器噪聲帶來的估算誤差;
34、動態壽命預測子模塊,與所述卡爾曼濾波soc估算模塊通信,用于基于內阻建模和累積放電數據對儲能單元的健康狀態進行實時評估,并在預測到容量衰減或故障風險時向所述電力管理模塊發出警告信號。
35、優選的,所述動態壽命預測子模塊通過建立基于等效電路模型的內阻增量方程和放電容量衰減方程來實時評估儲能單元的健康狀態,包括:
36、rt=r0+α·δt+β·f(放電倍率,溫度)
37、其中,rt表示當前時刻的等效內阻,r0為初始內阻,α和β為環境和負載條件相關的系數,f(·)為校正函數,用于修正放電倍率及溫度對內阻增長的影響。
38、cremaining=c0-∫0tk·g(δdod,δt,rt)dt
39、其中,cremaining和c0分別表示當前和初始可用容量,k為衰減速率系數,g(·)為綜合放電深度(δdod)、溫度變化(δt)與內阻值(rt)的衰減函數。
40、所述動態壽命預測子模塊基于所述內阻增量方程和放電容量衰減方程的計算結果,結合所述卡爾曼濾波soc估算模塊輸出的實時荷電狀態,對儲能單元的健康狀態進行動態評估,并在檢測到潛在失效風險時生成告警信號,從而提高無人機系統在多場景運行下的安全性與連續供電能力。
41、優選的,所述儲能模塊中設置有環境溫度自適應控制單元,環境溫度自適應控制單元根據無人機作業環境的溫度變化實時調整儲能單元的散熱或保溫措施。
42、優選的,所述自動駕駛控制模塊進一步包括故障診斷與冗余決策單元,用于在檢測到關鍵傳感器或動力輸出異常時,通過冗余算法自動切換至備用控制策略或備用電源。
43、本技術中提供的一個或多個技術方案,至少具有如下技術效果或優點:
44、本發明的基于太陽能發電的自動駕駛無人機運輸系統能夠在不同光照條件下高效地收集并利用太陽能,以延長無人機的續航時間。尤其在長距離或連續作業場景中,所述系統能夠通過儲能模塊及電力管理模塊的智能調度,為自動駕駛控制模塊提供穩定可靠的電力支持,從而實現自主化程度高、工作時長長、任務靈活度大的飛行運輸服務。該系統在物流配送、應急救援、地理測繪等領域具有廣闊的應用前景。
45、應當理解,
技術實現要素:
部分中所描述的內容并非旨在限定本發明的實施例的關鍵或重要特征,亦非用于限制本發明的范圍。本發明的其它特征將通過以下的描述變得容易理解。
- 還沒有人留言評論。精彩留言會獲得點贊!