一種生物安全柜質量檢測儀及其自動校正方法與流程
本發明屬于檢測,尤其涉及一種生物安全柜質量檢測儀及其自動校正方法。
背景技術:
1、生物安全柜(bsc)作為重要的實驗室設備,廣泛用于生物、化學等危險物質的操作與研究。而對生物安全柜的質量進行檢測的檢測裝置,則是保證生物安全柜使用安全的重要計量儀器。
2、目前市面上的生物安全柜質量檢測儀多采用微生物法或碘化鉀法這兩種方法對生物安全柜進行檢測,其中碘化鉀法是首先在生物安全柜中放入碘化鉀的氣溶膠發生器,在生物安全柜中產生碘化鉀的氣溶膠,然后再將生物安全柜質量檢測儀放在生物安全柜的正前方,通過在測量單元中的主風道產生負壓,帶動4個支路風道進行吸氣,從而使安裝在支路風道口的4個濾紙可以吸入生物安全柜前方空間的空氣,并吸附空氣中的碘化鉀的氣溶膠,最后再取下4個濾紙,并均滴上氯化鈀溶液,使吸附的碘化鉀變色,通過查看碘化鉀斑點的數量,來確定生物安全柜質量是否達標。
3、在對生物安全柜質量進行檢測的過程中,需要一次對比4個濾紙上的碘化鉀斑點的數量,這就要求4個濾紙上的碘化鉀斑點的數量不能誤差過大,要想做到這一點,需要在檢測前,控制4個支路風道的吸氣流量保持一致。
4、目前傳統的做法為人工多次調節4個支路風道的蝶閥,使其4個支路風道的流量最終保持一致,調節過程繁瑣,耗時高。
技術實現思路
1、本發明的目的是提供一種生物安全柜質量檢測儀及其自動校正方法,解決了自動調節4個支路風道的流量的技術問題。
2、為實現上述目的,本發明采用如下技術發明:
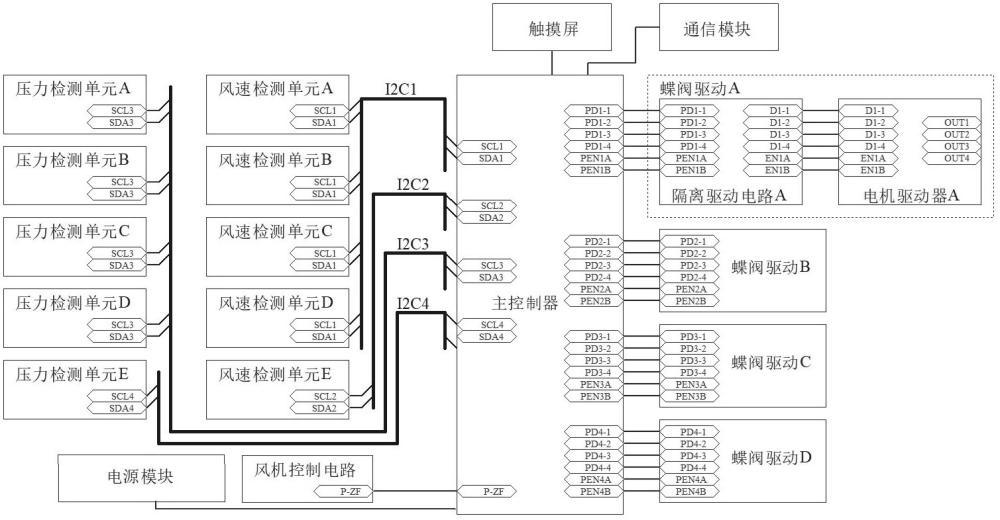
3、一種生物安全柜質量檢測儀,包括壓力檢測單元a、壓力檢測單元b、壓力檢測單元c、壓力檢測單元d、壓力檢測單元e、風速檢測單元a、風速檢測單元b、風速檢測單元c、風速檢測單元d、風速檢測單元e、風機控制電路、主控制器、蝶閥驅動電路a、蝶閥驅動電路b、蝶閥驅動電路c、蝶閥驅動電路d、觸摸屏、通信模塊和電源模塊,壓力檢測單元a、壓力檢測單元b、壓力檢測單元c和壓力檢測單元d均通過第一i2c總線與主控制器連接,壓力檢測單元e通過第二i2c總線與主控制器連接,風速檢測單元a、風速檢測單元b、風速檢測單元c和風速檢測單元d均通過第三i2c總線與主控制器連接,風速檢測單元e通過第四i2c總線與主控制器連接;
4、風機控制電路是由場效應管q1和場效應管q2構成的3.3v轉12v電平驅動電路,場效應管q1的g極與主控制器的一個io口連接,場效應管q1的s極驅動場效應管q2,場效應管q2用于控制風機的開啟或關閉;
5、蝶閥驅動電路a包括隔離驅動電路a和電機驅動器a,隔離驅動電路a的輸入端分別與主控制器的一組io口連接、輸出端驅動電機驅動器的輸入端,電機驅動器的輸出端連接并驅動外部用于控制第一蝶閥開啟或關閉的第一驅動電機;
6、蝶閥驅動電路b、蝶閥驅動電路c和蝶閥驅動電路d的電路原理均與蝶閥驅動電路a的相同,蝶閥驅動電路b、蝶閥驅動電路c和蝶閥驅動電路d分別與主控制器的不同的io口連接,并且分別驅動外部用于控制第二蝶閥的第二驅動電機、用于控制第三蝶閥的第三驅動電機、用于控制第四蝶閥的第四驅動電機;觸摸屏和通信模塊均與主控制器連接;
7、電源模塊為所有壓力檢測單元、所有風速檢測單元、風機控制電路、主控制器、觸摸屏、通信模塊和所有蝶閥驅動電路供電。
8、優選的,所述電源模塊包括12v穩壓模塊、5v穩壓模塊和3.3v穩壓模塊,12v穩壓模塊的輸入端連接市電、輸出端輸出12v電源,5v穩壓模塊的輸入端連接12v電源、輸出端輸出5v電源,3.3v穩壓模塊的輸入端連接5v電源、輸出端輸出3.3v電源;
9、所述12v穩壓模塊的型號為lrs-35-12開關電源;所述5v穩壓模塊的型號為lm7805;所述3.3v穩壓模塊的型號為am1117。
10、優選的,所述壓力檢測單元a包括接口j1、電容c1、電阻r1和電阻r5,接口j1連接外部第一壓力傳感器,具體為接口j1的4腳連接第一壓力傳感器的供電端、2腳連接第一壓力傳感器的scl端、1腳連接第一壓力傳感器的sda端、3腳連接地線;
11、接口j1的4腳還連接3.3v電源、3腳和4腳之間連接有濾波電容c1、2腳和1腳分別通過電阻r1和電阻r5連接3.3v電源,接口j1的2腳和1腳分別為第一i2c總線的scl1接口和sda1接口,分別與主控制器的一組io口連接;
12、所述壓力檢測單元b、所述壓力檢測單元c和所述壓力檢測單元d的電路原理與所述壓力檢測單元a的相同,并與所述壓力檢測單元a一同連接第一i2c總線;所述壓力檢測單元b、所述壓力檢測單元c和所述壓力檢測單元d分別連接外部第二壓力傳感器、第三壓力傳感器和第四壓力傳感器;
13、所述壓力檢測單元e的電路原理與所述壓力檢測單元a的相同,所述壓力檢測單元e連接第二i2c總線與主控制器的一組io口連接;所述壓力檢測單元e連接外部第五壓力傳感器;
14、所述風速檢測單元a包括接口j5、電容c5、電阻r9和電阻r13,接口j5連接外部第一風速傳感器,具體為接口5的4腳連接第一風速傳感器的供電端、2腳連接第一風速傳感器的scl端、1腳連接第一風速傳感器的sda端、3腳連接地線;
15、接口j5的4腳還連接3.3v電源、3腳和4腳之間連接有濾波電容c5、2腳和1腳分別通過電阻r9和電阻r13連接3.3v電源,接口j5的2腳和1腳分別為第三i2c總線的scl3接口和sda3接口,分別與主控制器的一組io口連接;
16、所述風速檢測單元b、所述風速檢測單元c和所述風速檢測單元d的電路原理與所述風速檢測單元a的相同,并與所述風速檢測單元a一同連接第三i2c總線;所述風速檢測單元b、所述風速檢測單元c和所述風速檢測單元d分別連接外部第二風速傳感器、第三風速傳感器和第四風速傳感器;
17、所述風速檢測單元e的電路原理與所述風速檢測單元a的相同,所述風速檢測單元e連接第四i2c總線與主控制器的一組io口連接;所述風速檢測單元e連接外部第五風速傳感器。
18、所述第一風速傳感器、所述第二風速傳感器、所述第三風速傳感器、所述第四風速傳感器和所述第五風速傳感器的型號均為awm720p1數字風速傳感器;所述第一壓力傳感器、所述第二壓力傳感器、所述第三壓力傳感器、所述第四壓力傳感器和所述第五壓力傳感器的型號均為bmp180數字壓力傳感器。
19、優選的,所述電機驅動器a包括驅動芯片ic1、二極管d1、二極管d2、二極管d3、二極管d4、二極管d5、二極管d6、二極管d7、二極管d8、電容c12和接口j9;
20、隔離驅動電路a包括光耦u20、光耦u21、光耦u22、光耦u23、光耦u24和光耦u25及其對應的外圍電路構成的6路光電隔離電路;
21、驅動芯片ic1的in1端、in2端、in3端、in4端、ena端和enb端分別通過光耦u20、光耦u21、光耦u22、光耦u23、光耦u24和光耦u25分別與主控制器的不同的io口連接;
22、驅動芯片ic1的out1端、out2端、out3端和out4端分別與接口j9的5腳、4腳、3腳、2腳和1腳連接,接口j9的6腳連接12v電源、1腳連接地線;驅動芯片ic1的isena端、isenb端和gnd端均連接地線;
23、二極管d1的正極連接驅動芯片ic1的out4端、負極連接12v電源,二極管d2的負極連接驅動芯片ic1的out4端、正極連接地線;
24、二極管d3的正極連接驅動芯片ic1的out3端、負極連接12v電源,二極管d4的負極連接驅動芯片ic1的out3端、正極連接地線;
25、二極管d5的正極連接驅動芯片ic1的out2端、負極連接12v電源,二極管d6的負極連接驅動芯片ic1的out2端、正極連接地線;
26、二極管d7的正極連接驅動芯片ic1的out1端、負極連接12v電源,二極管d8的負極連接驅動芯片ic1的out1端、正極連接地線;
27、驅動芯片ic1的vss端連接5v電源、vs端連接12v電源,電容c12為驅動芯片ic1的vss端的入地電容;
28、所述驅動芯片ic1的型號為l298n直流電機驅動器,所述第一驅動電機、所述第二驅動電機、所述第三驅動電機和所述第四驅動電機的型號均為n20微型直流電機。
29、優選的,所述風機控制電路具體包括場效應管q1、場效應管q2、電阻r21、電阻r22、電阻r35、二極管d9和接口j12,場效應管q1的g極通過電阻r22連接主控制器的一個io口、s極通過電阻r35連接場效應管q2的g極、d極連接3.3v電源,電阻r21的一端連接3.3v電源、另一端通過電阻r22連接場效應管q1的g極,場效應管q2的s極連接地線、d極連接二極管d9的正極、二極管d9的負極連接12v電源,接口j12的1腳和2腳均與二極管d9的負極連接、3腳和4腳均與二極管d9的正極連接;
30、接口j12連接風機;
31、所述主控制器的型號為stm32f407,所述通信模塊的型號為rs485。
32、一種生物安全柜質量檢測儀的自動校正方法,包括如下步驟:
33、步驟1:將生物安全柜質量檢測儀放置在檢測空間內,對生物安全柜質量檢測儀進行市電通電后,通過觸摸屏選擇矯正模式,主控制器控制生物安全柜質量檢測儀進入矯正模式;
34、矯正模式的具體流程如下:
35、步驟1-1:初始化階段:
36、啟動系統:主控制器通過風機控制電路首先啟動設置在主風道內的風機,通過風速檢測單元e采集設置在主風道內的第五風速傳感器的數據,從而獲取到主風道內的風速;同時通過壓力檢測單元e采集設置在主風道內的第五壓力傳感器的數據,從而獲取到主風道內的壓力值;
37、同理,主控制器分別通過第一風速傳感器、第二風速傳感器、第三風速傳感器、第四風速傳感器分別獲取4個支路風道內的風速;
38、主控制器分別通過第一壓力傳感器、第二壓力傳感器、第三壓力傳感器、第四壓力傳感器分別獲取4個支路風道內的壓力值;
39、根據獲取到的風速,計算每個風道內的流量:
40、qi=?ai×?vi;
41、其中,q為流量;a為風道的截面積,為預設值;v為風速;i表示風道的編號,i=1,2,3,4,5,其中i=5表示主風道;
42、記錄各個支路風道的初始流量:q1,q2,q3,q4;
43、步驟1-2:主控制器計算每個支路風道當前流量與目標流量之間的誤差,目標流量為預期的流量:
44、ei(0)?=?qi(0)???qtarget;
45、其中,ei(0)為計算得到的初始誤差,qi(0)表示初始流量;qtarget是目標流量:
46、qtarget=?q5÷?4;
47、q5表示了主風道的流量;
48、步驟1-3:主控制器對每個支路風道,分別設計一個pid控制器,目標是調整蝶閥開度θj使每個支路風道的流量qj始終保持在設定的目標值附近,j與i的取值保持一致:
49、pid控制器的控制方程如下:
50、
51、其中,ej(t)?=?qj(t)???qtarget,表示風道j的當前流量誤差;kp、ki、kd分別為比例、積分和微分增益;δum(t)為由風道和風機動態模型計算出的修正量,用來補償系統響應的非線性或動態特性;δuc(t)是由干擾補償計算出的調整量;
52、δum(t)=?α×(?qpred1(t)???qmeasured(t));
53、其中,α是一個系數,用來調節模型修正量對風閥開度的影響;qpred1(t)是根據動態建模得到的預測流量;qmeasured(t)是實際測量的流量;
54、δuc(t)=?β×(?qpred2(t)???qmeasured(t));
55、其中,β是一個系數,用來調節干擾補償的強度,qpred2(t)是通過流量預測模型得到的預測流量;qmeasured(t)是實際測量的流量;
56、步驟1-4:根據pid計算的調整量更新每個支路風道的蝶閥開度θi(t):
57、θi(t)?=?θprev+?δθi(t);
58、其中,θprev是之前的蝶閥開度,δθi(t)是根據pid控制器計算的調整量;
59、步驟1-5:在執行步驟1-1到步驟1-4時,需要等待氣流穩定,即,在每次調整蝶閥后,等待一定時間twait以確保氣流穩定,twait通過風道長度和氣體聲速來估算:
60、;
61、其中,l2是支路風道的長度,為預設值;vsound是氣體的聲速,固定為343m/s;τ是系統的慣性時間常數;
62、在等待twait時間后,重新測量每個支路風道的流量,計算誤差:
63、ei(tnew)?=?qi(tnew)???qtarget;
64、將ei(tnew)與預設的誤差允許閾值?threshold進行對比,如果ei(tnew)在閾值?threshold內,即,ei(tnew)?≤??threshold,則表示支路風道i已經達到預期;
65、步驟1-6:重復步驟1-1到步驟1-5的流程,繼續迭代調節,直到所有支路風道的流量都在設定的閾值內,即滿足條件qi在qtarget±??threshold內,認為調節過程完成;
66、步驟1-7:記錄每個支路風道的最終蝶閥開度,作為默認的調節策略,保存為系統默認配置;
67、步驟2:在實際使用過程中,首選調用默認的調節策略進行調節,若調節后無法滿足條件qi在qtarget±??threshold內,則調用步驟1中矯正模式的方法進行重新調節。
68、優選的,在執行步驟1-3時,kp、ki、kd的取值根據流量誤差自適應調整,具體為:
69、使用初始預設的pid參數kpbase、kibase、kdbase啟動pid控制器,根據流量誤差ej(t)的大小,實時調整pid參數:
70、kp=?kpbase×(1+λ×∣ej(t)∣);
71、ki=?kibase×(1+λ×∣ej(t)∣);
72、kd=?kdbase×(1+λ×∣ej(t)∣);
73、其中,λ為調節系數。
74、優選的,根據動態建模得到的預測流量qpred1(t)的計算公式如下:
75、qpred1(t)?=?c?×?n(t)?×?a;
76、其中,c為風機與風道之間的常數系數,為出廠預設值;a為風道的截面積;n(t)為風機的轉速;
77、n(t)?=?k1×?δp(t)?+?k2;
78、其中,δp(t)為第五壓力傳感器測量得到的壓力值變化量,k1,k2均為預設常數;
79、通過流量預測模型得到的預測流量qpred2(t)的計算公式如下:
80、qpred2(t)?=?a?×?θ(t)?+?b;
81、其中,a和b為通過歷史數據擬合得到的系數,a和b均為出廠預設值,θ(t)為當前蝶閥開度。
82、優選的,主控制器根據4個支路風道內的壓力值的變化量,來監控生物安全柜質量檢測儀的工作狀態的穩定性,并生成穩定性報告,通過通信模塊上傳給上位機。
83、本發明所述的一種生物安全柜質量檢測儀及其自動校正方法,解決了自動調節4個支路風道的流量的技術問題,本發明引入了自適應pid控制方法,能夠根據實時流量誤差調整控制參數,通過自適應調整pid增益參數,能夠根據不同的運行狀態自動優化控制策略,有效提升系統的響應能力和調節精度,減少人工干預,通過建立風道和風機的動態模型,能夠實時預測流量,并基于模型的預測值和實際流量之間的偏差進行修正,動態建模不僅能夠提高流量調節的精度,還能有效補償系統的非線性和動態特性,從而更好地應對環境變化和干擾,采用高精度的壓力和風速傳感器,結合多通道的i2c總線通信,確保了多點采集數據的實時性和準確性,通過計算各個風道的流量并與目標流量對比,能夠高效調節蝶閥,確保所有支路風道的流量相等,達到設定的標準,當系統無法滿足設定的流量精度時,能夠自動進入校正模式,并通過動態調節蝶閥來重新調整各個風道的流量,確保系統長期穩定運行,該自動校正功能減少了人工操作的需求,提高了系統的自我修復能力,通過精確計算氣流的穩定時間和預測流量,能夠更加精確地進行調整,并且能夠根據環境變化進行實時反饋與優化,風機轉速和壓力波動等干擾因素的影響被最小化,從而確保系統的穩定性和流量的精確調控。
- 還沒有人留言評論。精彩留言會獲得點贊!