一種高超聲速飛行器預測反步控制方法
本發明涉及高超聲速飛行器控制領域,具體指有一種高超聲速飛行器預測反步控制方法。
背景技術:
1、為了確保hv在復雜的飛行環境下能夠保持穩定且具有強大的魯棒性,必須在其飛行控制系統設計中不斷創新并引入先進的控制方法和手段。傳統的基于反步控制、滑模控制和魯棒控制方法設計的控制器,往往忽略了控制舵面、飛行攻角等關鍵約束條件。這樣的設計在外部干擾較強時,可能導致控制性能下降,甚至系統失穩。因此,約束處理、強非線性、強耦合以及快速時變等問題,依然是hv控制系統設計中待解決的關鍵難題。預測控制作為一種優化控制方法,其可以在設計控制器時充分考慮控制和狀態的約束條件,特別適用于處理多變量、受約束的復雜系統。這種方法的顯著優勢在于,它能在嚴格遵循狀態和控制約束的同時,依然能夠實現出色的控制性能。然而,預測控制也存在一定的局限性。由于它需要在每個采樣周期內解決一個優化問題,這導致在線計算時間的顯著增加。
2、針對上述的現有技術存在的問題設計一種高超聲速飛行器預測反步控制方法是本發明研究的目的。
技術實現思路
1、針對上述現有技術存在的問題,本發明在于提供一種高超聲速飛行器預測反步控制方法,能夠有效解決上述現有技術存在的至少一個問題。
2、本發明的技術方案是:
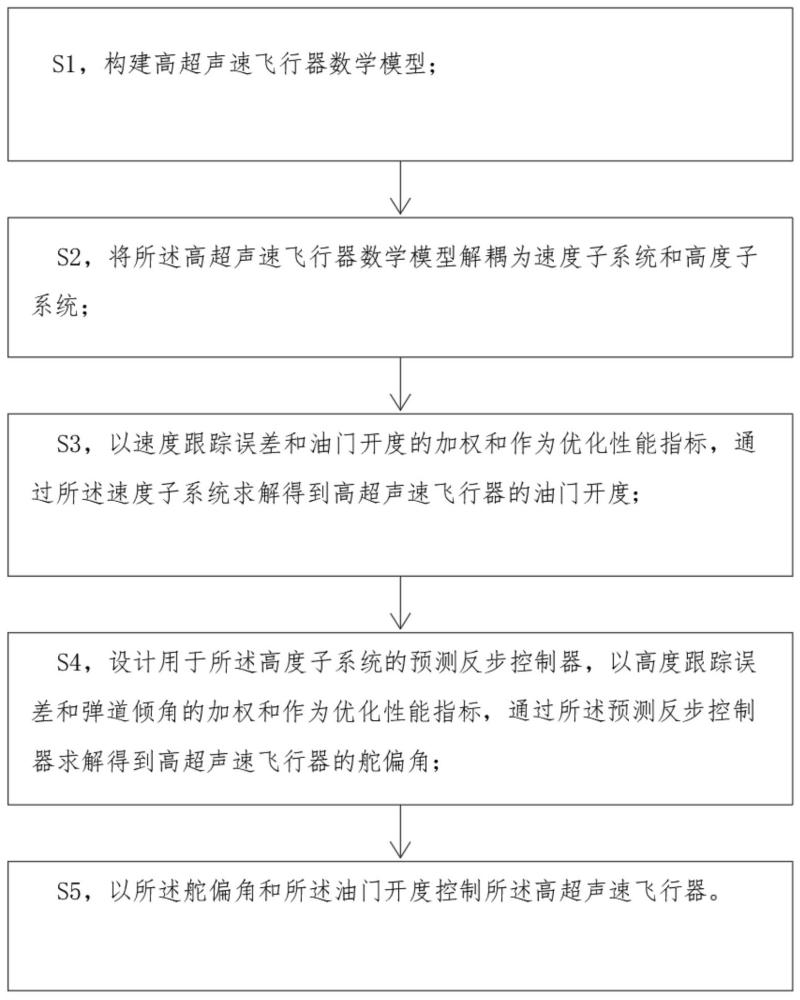
3、一種高超聲速飛行器預測反步控制方法,包括以下步驟:
4、s1,構建高超聲速飛行器數學模型;
5、s2,將所述高超聲速飛行器數學模型解耦為速度子系統和高度子系統;
6、s3,以速度跟蹤誤差和油門開度的加權和作為優化性能指標,通過所述速度子系統求解得到高超聲速飛行器的油門開度;
7、s4,設計用于所述高度子系統的預測反步控制器,以高度跟蹤誤差和彈道傾角的加權和作為優化性能指標,通過所述預測反步控制器求解得到高超聲速飛行器的舵偏角;
8、s5,以所述舵偏角和所述油門開度控制所述高超聲速飛行器。
9、進一步地,所述高超聲速飛行器數學模型通過系列公式表示:
10、;
11、其中,為速度、為彈道傾角、為高度、為攻角、為俯仰角速度,為彈性模態,分別是重力加速度、慣性矩、飛行器質量、彈性模態頻率和阻尼比,分別表示推力、阻力、升力、俯仰力矩和廣義力;
12、以及,近似表示如下:
13、;
14、其中,均為已知常數,、、、、、、為標稱情況下的系數,標稱情況下的系數展開后表示如下:
15、;
16、其中,、、分別表示參考面積、推力力臂和平均氣動弦;為動壓力,,為空氣密度;、、分別表示高超聲速飛行器的燃油當量比、鴨翼和升降舵偏角;
17、、、。
18、進一步地,將所述高超聲速飛行器數學模型解耦為速度子系統和高度子系統包括:
19、s2.1,假設所述高超聲速飛行器在巡航階段的彈道傾角接近0,使高超聲速飛行器數學模型中的,定義升力的值遠大于,從而忽略推力對高超聲速飛行器的影響;
20、s2.2,將高超聲速飛行器數學模型解耦為嚴格反饋形式,得到:
21、;
22、;
23、其中,,,,,,,,,;為鴨翼偏轉與升降舵偏轉的負增益系數,
24、表示速度子系統,表示高度子系統。
25、進一步地,s3,以速度跟蹤誤差和油門開度的加權和作為優化性能指標,通過所述速度子系統求解得到高超聲速飛行器的油門開度包括:
26、s3.1,根據速度子系統,將速度子系統的控制律設計轉化為二次性能指標優化問題,速度控制優化問題表示為:
27、;
28、其中,為高超聲速飛行器的預測速度,為高超聲速飛行器的速度參考軌跡預測值,為時刻的燃油當量比,為燃料當量比的最小值和最大值,為預測步長,分別為速度跟蹤誤差和燃油當量比的加權矩陣,j為性能指標,為初始飛行速度,t為預測域的時刻;
29、s3.2,將速度子系統表示為與系統狀態相關的線性化模型,其中;
30、s3.3,對線性化模型進行離散化,得到速度預測模型,其中,t為離散化步長,k表示離散時刻,為k時刻的燃油當量比,分別為下一時刻的飛行速度和當前時刻的飛行速度。
31、s3.4,通過所述速度預測模型將所述速度控制優化問題轉化為速度控制二次規劃問題;
32、s3.5,求解所述速度控制二次規劃問題,得到高超聲速飛行器的油門開度。
33、進一步地,s4,設計用于所述高度子系統的預測反步控制器,以高度跟蹤誤差和彈道傾角的加權和作為優化性能指標,通過所述預測反步控制器求解得到高超聲速飛行器的舵偏角包括:
34、s4.1,設計高超聲速飛行器的高度虛擬控制律,將高度跟蹤誤差和彈道傾角的加權和作為優化性能指標,將高度虛擬控制律的求解轉換為高度控制優化問題,高度控制優化問題表示為:
35、;
36、其中,為高超聲速飛行器的預測狀態,為高度參考軌跡預測值,、表示高度跟蹤誤差權值和控制量權值矩陣,且均為正定矩陣,j為性能指標;分別為攻角最小值和攻角最大值,分別為升降舵偏角最小值和升降舵偏角最大值,為時刻的控制律,為預測高度和初始飛行高度,為攻角的虛擬控制量,為攻角與的函數關系,近似為,為俯仰角,為舵偏角關于的函數;
37、s4.3,將高度子系統的第一式轉化為高度離散狀態空間模型,得到,式中,,為離散步長,k表示離散時刻;
38、s4.4,通過一序列等價變換,將高度控制優化問題轉化為二次規劃問題;
39、s4.5,求解所述二次規劃問題,求解得到高度虛擬控制律;
40、s4.6,結合反步控制法,設計所述高度虛擬控制律中的升降舵偏轉角。
41、進一步地,s4.6,結合反步控制法,設計所述高度虛擬控制律中的升降舵偏轉角包括:
42、s4.6.1,設計攻角虛擬控制量,使得高超聲速飛行器的彈道傾角跟蹤上s4.5所設計的高度虛擬控制律;
43、s4.6.2,設計俯仰角虛擬控制量,使得高超聲速飛行器的彈道攻角跟蹤上s4.6.1所設計的攻角虛擬控制量;
44、s4.6.3,設計升降舵偏角,使得高超聲速飛行器的俯仰角跟蹤上s4.6.2所設計的俯仰角虛擬控制量。
45、進一步地,所設計的攻角虛擬控制量為;
46、所設計的俯仰角虛擬控制量為;
47、升降舵偏角為;
48、其中,為彈道傾角跟蹤誤差,為設計的反饋增益;為攻角跟蹤誤差,為設計的反饋增益;為俯仰角速度跟蹤誤差,為設計的反饋增益。
49、進一步地,分別設計攻角虛擬控制量、俯仰角虛擬控制量、升降舵偏角的反正切跟蹤微分器,用于攻角虛擬控制量、俯仰角虛擬控制量、升降舵偏角計算過程中的導數計算。
50、進一步地,攻角虛擬控制量對應的反正切跟蹤微分器為:;
51、俯仰角虛擬控制量對應的反正切跟蹤微分器為:;
52、升降舵偏角對應的反正切跟蹤微分器為:;
53、其中,為攻角虛擬控制量對應的反正切跟蹤微分器的狀態,為攻角虛擬控制量對應的反正切跟蹤微分器的設計參數,其值均大于0;
54、為俯仰角虛擬控制量對應的反正切跟蹤微分器的狀態,為俯仰角虛擬控制量對應的反正切跟蹤微分器,其值均大于0;
55、為升降舵偏角對應的反正切跟蹤微分器的狀態,為升降舵偏角對應的反正切跟蹤微分器的設計參數,其值均大于0。
56、因此,本發明提供以下的效果和/或優點:
57、本發明將反步控制與預測控制結合,一方面發揮預測控制處理約束的優點,另一方面將約束優化的維數降為一維,可大大減少在線時間。
58、本技術針對高超聲速飛行器受到的約束條件限制,通過調節發動機節流閥指令和升降舵偏轉角,以實現對參考速度和參考高度的精確跟蹤。具體地,本技術通過將所述高超聲速飛行器數學模型解耦為速度子系統和高度子系統,并分別通過對速度子系統和高度子系統進行不同的轉換,以及不同的優化性能指標作為約束,求解得到對高超聲速飛行器的控制律,從而能夠精確控制高超聲速飛行器。
59、本技術通過將速度子系統轉換為線性化模型,再轉換為離散化模型,從而將所述速度控制優化問題轉化為速度控制二次規劃問題,并能夠求解所述速度控制二次規劃問題,得到高超聲速飛行器的油門開度。
60、本技術通過設計高超聲速飛行器的高度虛擬控制律,將高度跟蹤誤差和彈道傾角的加權和作為優化性能指標,將高度虛擬控制律的求解轉換為高度控制優化問題,通過一序列等價變換,將高度控制優化問題轉化為二次規劃問題,從而能夠求解得到高度虛擬控制律。
61、本技術利用反步法,設計了攻角的虛擬控制量、俯仰角速率的虛擬控制量和實際的控制量——升降舵偏角。
62、本技術分別設計攻角虛擬控制量、俯仰角虛擬控制量、升降舵偏角的反正切跟蹤微分器,用于攻角虛擬控制量、俯仰角虛擬控制量、升降舵偏角計算過程中的導數計算,避免了反步控制中的“微分爆炸”問題。
63、通過本技術提供的控制方法,控制高超聲速飛行器時,速度跟蹤誤差和高度跟蹤誤差相比于全狀態空間模型的預測控制更小、所設計控制器在控制過程中,攻角、舵偏角和燃料當量比都在約束范圍內。
64、本發明的其他特征和優點將在隨后的說明書中闡述,并且,部分地從說明書中變得顯而易見,或者通過實施本發明而了解。本發明的目的和其他優點在說明書以及附圖中所特別指出的結構來實現和獲得。
65、應當明白,本發明的上文的概述和下面的詳細說明是示例性和解釋性的,并且意在提供對如要求保護的本發明的進一步的解釋。
- 還沒有人留言評論。精彩留言會獲得點贊!