一種基于有向向量的車載圖像處理方法、裝置、車輛域控制器及車輛與流程
本發明涉及智能駕駛,尤其是涉及一種基于有向向量的車載圖像處理方法、裝置、車輛域控制器及車輛。
背景技術:
1、在智能駕駛行業中,實時輸出車載環視圖是提升行車安全和駕駛體驗的關鍵技術之一。車載全景影像系統通過集成多個攝像頭,能夠實現360度全方位的環視圖展示,為駕駛員提供全景式的視野。
2、然而,當汽車處于如進出隧道、橋洞,或個別攝像頭被強光照射或遮擋等光線明暗變化劇烈的場景時,環視圖存在亮度不均衡、畫面過曝或過暗等情況,可能會影響駕駛者的視覺體驗和駕駛安全。
技術實現思路
1、本發明提供一種基于有向向量的車載圖像處理方法、裝置、車輛域控制器及車輛,以解決亮度不均衡的技術問題,以實現在劇烈變化的光照條件下輸出亮度均衡的環視圖的效果。
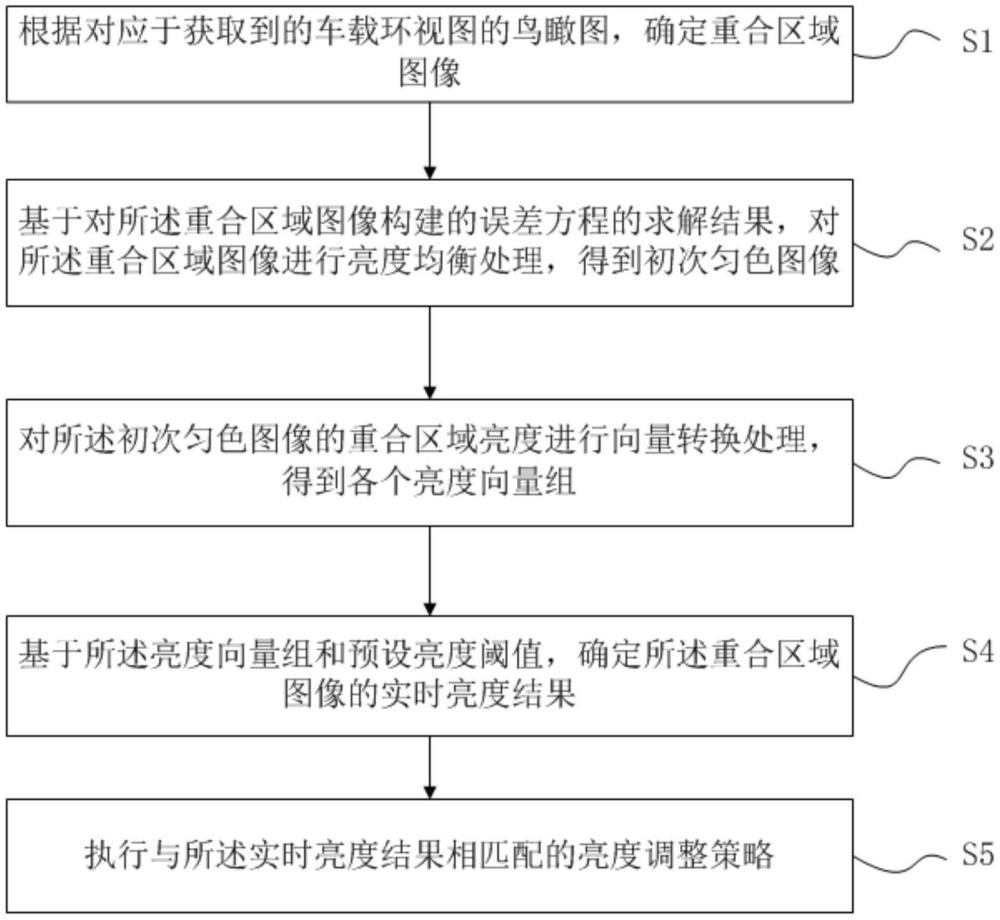
2、為了解決上述技術問題,本發明實施例提供了一種基于有向向量的車載圖像處理方法,包括:根據對應于獲取到的車載環視圖的鳥瞰圖,確定重合區域圖像;
3、基于對所述重合區域圖像構建的誤差方程的求解結果,對所述重合區域圖像進行亮度均衡處理,得到初次勻色圖像;
4、對所述初次勻色圖像的重合區域亮度進行向量轉換處理,得到各個亮度向量組;
5、基于所述亮度向量組和預設亮度閾值,確定所述重合區域圖像的實時亮度結果;
6、執行與所述實時亮度結果相匹配的亮度調整策略。
7、作為其中一種優選方案,所述根據對應于獲取到的車載環視圖的鳥瞰圖,確定重合區域圖像,包括:
8、獲取由車載攝像頭采集到的各個車載環視圖;
9、對每一所述車載環視圖進行預處理,并基于選定的視野方向對預處理后的各個所述車載環視圖進行分析,確定重合區域圖像。
10、作為其中一種優選方案,所述亮度調整策略至少包括過亮調整策略和過暗調整策略;
11、所述執行與所述實時亮度結果相匹配的亮度調整策略,包括:
12、確定與所述過亮調整策略對應的第一亮度閾值區間,基于與所述第一亮度閾值區間相匹配的第一攝像頭控制指令;及,
13、確定與所述過暗調整策略對應的第二亮度閾值區間,基于與所述第二亮度閾值區間相匹配的第二攝像頭控制指令。
14、作為其中一種優選方案,所述誤差方程為
15、
16、其中,和分別表示圖像i和圖像j的調整系數,channel∈(r,g,b),σn表示顏色誤差的標準差,σg表示增益參數的標準差,mean表示圖像i和圖像j的重合區域的亮度平均值。
17、作為其中一種優選方案,在執行所述亮度調整策略后,所述基于有向向量的車載圖像處理方法還包括:
18、利用高斯-賽德爾迭代法求解泊松方程對獲取到的實時圖像進行泊松融合處理,得到融合后的重合區域圖像。
19、作為其中一種優選方案,所述基于有向向量的車載圖像處理方法還包括:
20、基于所述車載環視圖和所述重合區域圖像,確定非重合區域圖像;
21、利用環視拼接算法將所述非重合區域和融合后的所述重合區域圖像進行拼接,生成待顯示車載環視圖。
22、作為其中一種優選方案,以樹狀圖的形式對所述實時亮度結果進行顯示。
23、本發明另一實施例提供了一種基于有向向量的車載圖像處理裝置,包括:
24、預處理模塊,用于根據對應于獲取到的車載環視圖的鳥瞰圖,確定重合區域圖像;
25、初次勻色模塊,用于基于對所述重合區域圖像構建的誤差方程的求解結果,對所述重合區域圖像進行亮度均衡處理,得到初次勻色圖像;
26、轉換模塊,用于對所述初次勻色圖像的重合區域亮度進行向量轉換處理,得到各個亮度向量組;
27、處理模塊,用于基于所述亮度向量組和預設亮度閾值,確定所述重合區域圖像的實時亮度結果;
28、執行模塊,用于執行與所述實時亮度結果相匹配的亮度調整策略。
29、本發明另一實施例提供了一種車輛域控制器,包括處理器、存儲器和通信總線,其中,所述處理器和所述存儲器通過所述通信總線與外接的車載攝像頭完成相互通信;
30、所述存儲器,用于存放計算機程序;
31、所述處理器,用于執行所述存儲器上所存放的所述計算機程序時,實現上述任一所述的基于有向向量的車載圖像處理方法。
32、本發明另一實施例提供了一種車輛,所述車輛有計算機程序,其中,所述車輛在執行所述計算機程序時,實現上述中任意一項所述的基于有向向量的車載圖像處理方法。
33、相比于現有技術,本發明實施例的有益效果在于以下所述中的至少一點:
34、(1)本發明以亮度向量組覆蓋了所有可能出現的亮度分布情況,并通過實時亮度結果調度亮度調整策略,提高車載環視系統的實時響應能力;
35、(2)在光線條件快速變化的情況下,例如,進出隧道或遇到強光照射時,本發明能迅速調整并提供連續且亮度均衡的環視圖像,更好地滿足動態環境下的需求。
技術特征:
1.一種基于有向向量的車載圖像處理方法,其特征在于,包括:
2.如權利要求1所述的基于有向向量的車載圖像處理方法,其特征在于,所述根據對應于獲取到的車載環視圖的鳥瞰圖,確定重合區域圖像,包括:
3.如權利要求1所述的基于有向向量的車載圖像處理方法,其特征在于,所述亮度調整策略至少包括過亮調整策略和過暗調整策略;
4.如權利要求1所述的基于有向向量的車載圖像處理方法,其特征在于,所述誤差方程為
5.如權利要求1所述的基于有向向量的車載圖像處理方法,其特征在于,在執行所述亮度調整策略后,所述基于有向向量的車載圖像處理方法還包括:
6.如權利要求5所述的基于有向向量的車載圖像處理方法,其特征在于,所述基于有向向量的車載圖像處理方法還包括:
7.如權利要求1所述的基于有向向量的車載圖像處理方法,其特征在于,以樹狀圖的形式對所述實時亮度結果進行顯示。
8.一種基于有向向量的車載圖像處理裝置,其特征在于,包括:
9.一種車輛域控制器,其特征在于,包括處理器、存儲器和通信總線,其中,所述處理器和所述存儲器通過所述通信總線與外接的車載攝像頭完成相互通信;
10.一種車輛,其特征在于,所述車輛有計算機程序,其中,所述車輛在執行所述計算機程序時,實現如權利要求1至7中任意一項所述的基于有向向量的車載圖像處理方法。
技術總結
本發明公開了一種基于有向向量的車載圖像處理方法、裝置、車輛域控制器及車輛,包括根據對應于獲取到的車載環視圖的鳥瞰圖,確定重合區域圖像;基于對所述重合區域圖像構建的誤差方程的求解結果,對所述重合區域圖像進行亮度均衡處理,得到初次勻色圖像;對所述初次勻色圖像的重合區域亮度進行向量轉換處理,得到各個亮度向量組;基于所述亮度向量組和預設亮度閾值,確定所述重合區域圖像的實時亮度結果;執行與所述實時亮度結果相匹配的亮度調整策略。本發明實施例提供的車載圖像處理方法,通過實時亮度結果調度亮度調整策略,提高車載環視系統的實時響應能力,并且在光線條件快速變化的情況下能迅速調整并提供連續且亮度均衡的環視圖像。
技術研發人員:覃湘嵐,李天輝,羅覃月
受保護的技術使用者:上汽通用五菱汽車股份有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!