基于AI平臺(tái)的橋梁施工監(jiān)測(cè)方法和系統(tǒng)與流程
本發(fā)明涉及人工智能的領(lǐng)域,尤其涉及基于ai平臺(tái)的橋梁施工監(jiān)測(cè)方法和系統(tǒng)。
背景技術(shù):
1、橋梁在建造過程中需要將鋼梁和纜索等構(gòu)件安裝在相應(yīng)位置,才能保證橋梁主體結(jié)構(gòu)的穩(wěn)定性。目前通常利用全站儀對(duì)橋梁構(gòu)件進(jìn)行定位,但是全站儀在使用之前需要進(jìn)行校正,并且全站儀在同一時(shí)間只能對(duì)單個(gè)橋梁構(gòu)件進(jìn)行定位檢測(cè),無法對(duì)大量橋梁構(gòu)件進(jìn)行快速準(zhǔn)確的定位識(shí)別,增加橋梁施工過程中對(duì)橋梁構(gòu)件的定位工作量和可靠性。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明的目的在于提供基于ai平臺(tái)的橋梁施工監(jiān)測(cè)方法和系統(tǒng),其從第一角度和第二角度分別對(duì)橋梁施工場(chǎng)地進(jìn)行拍攝,得到相應(yīng)的橋梁施工影像,并分析相應(yīng)的橋梁施工影像,得到第一橋梁構(gòu)件存在狀態(tài)信息和第二橋梁構(gòu)件存在狀態(tài)信息,對(duì)橋梁構(gòu)件進(jìn)行多視角的定位識(shí)別;對(duì)第一橋梁構(gòu)件存在狀態(tài)信息和第二橋梁構(gòu)件存在狀態(tài)信息進(jìn)行ai分析,得到關(guān)于同一構(gòu)件對(duì)應(yīng)的第一位姿信息和第二位姿信息,以此判斷同一橋梁構(gòu)件是否處于正常位姿狀態(tài),提高對(duì)橋梁構(gòu)件位姿狀態(tài)檢測(cè)的準(zhǔn)確性;當(dāng)同一橋梁構(gòu)件不處于正常位姿狀態(tài),確定對(duì)同一橋梁構(gòu)件進(jìn)行位姿調(diào)整的操作參數(shù),以此生成操作指令并發(fā)送至施工設(shè)備,便于施工設(shè)備對(duì)橋梁構(gòu)件進(jìn)行及時(shí)準(zhǔn)確的位姿調(diào)整,減少橋梁構(gòu)件的定位工作量。
2、本發(fā)明是通過以下技術(shù)方案實(shí)現(xiàn):
3、基于ai平臺(tái)的橋梁施工監(jiān)測(cè)方法,包括:
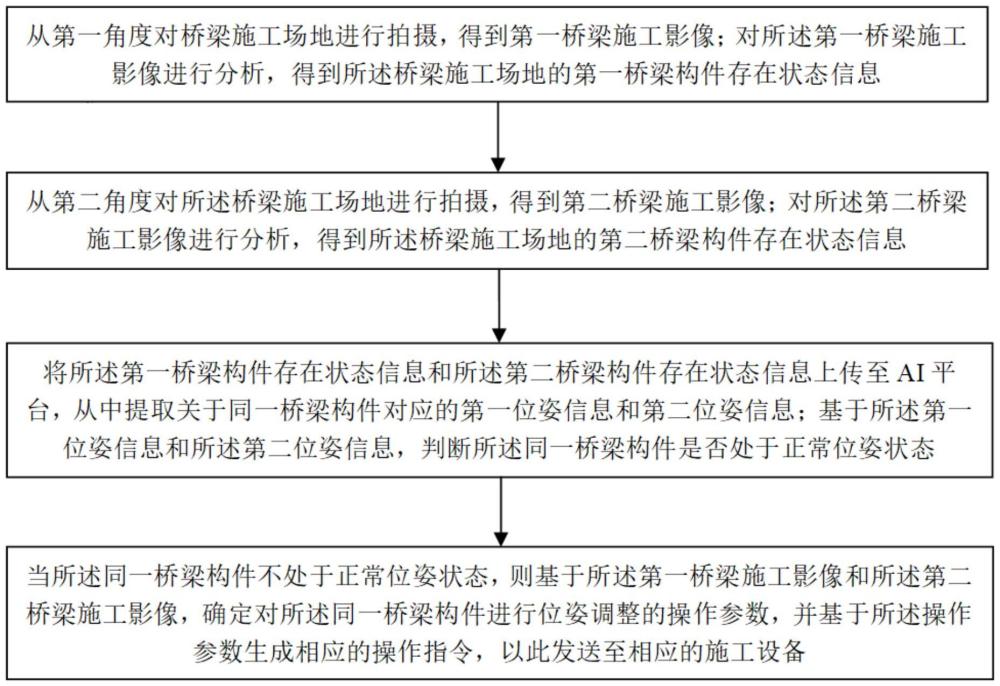
4、從第一角度對(duì)橋梁施工場(chǎng)地進(jìn)行拍攝,得到第一橋梁施工影像;對(duì)所述第一橋梁施工影像進(jìn)行分析,得到所述橋梁施工場(chǎng)地的第一橋梁構(gòu)件存在狀態(tài)信息;
5、從第二角度對(duì)所述橋梁施工場(chǎng)地進(jìn)行拍攝,得到第二橋梁施工影像;對(duì)所述第二橋梁施工影像進(jìn)行分析,得到所述橋梁施工場(chǎng)地的第二橋梁構(gòu)件存在狀態(tài)信息;
6、將所述第一橋梁構(gòu)件存在狀態(tài)信息和所述第二橋梁構(gòu)件存在狀態(tài)信息上傳至ai平臺(tái),從中提取關(guān)于同一橋梁構(gòu)件對(duì)應(yīng)的第一位姿信息和第二位姿信息;基于所述第一位姿信息和所述第二位姿信息,判斷所述同一橋梁構(gòu)件是否處于正常位姿狀態(tài);
7、當(dāng)所述同一橋梁構(gòu)件不處于正常位姿狀態(tài),則基于所述第一橋梁施工影像和所述第二橋梁施工影像,確定對(duì)所述同一橋梁構(gòu)件進(jìn)行位姿調(diào)整的操作參數(shù),并基于所述操作參數(shù)生成相應(yīng)的操作指令,以此發(fā)送至相應(yīng)的施工設(shè)備。
8、可選地,從第一角度對(duì)橋梁施工場(chǎng)地進(jìn)行拍攝,得到第一橋梁施工影像;對(duì)所述第一橋梁施工影像進(jìn)行分析,得到所述橋梁施工場(chǎng)地的第一橋梁構(gòu)件存在狀態(tài)信息,包括:
9、從地面角度對(duì)橋梁施工場(chǎng)地進(jìn)行雙目拍攝,得到所述橋梁施工場(chǎng)地的雙目影像;基于所述雙目影像的雙目視差,生成第一橋梁施工三維影像;
10、對(duì)所述第一橋梁施工三維影像進(jìn)行畫面像素輪廓識(shí)別處理,得到所述橋梁施工場(chǎng)地的所有橋梁構(gòu)件的第一邊緣輪廓分布狀態(tài)信息。
11、可選地,從第二角度對(duì)所述橋梁施工場(chǎng)地進(jìn)行拍攝,得到第二橋梁施工影像;對(duì)所述第二橋梁施工影像進(jìn)行分析,得到所述橋梁施工場(chǎng)地的第二橋梁構(gòu)件存在狀態(tài)信息,包括:
12、從高空角度對(duì)所述橋梁施工場(chǎng)地進(jìn)行掃描拍攝,得到所述橋梁施工場(chǎng)地的全景影像;對(duì)所述全景影像進(jìn)行三維轉(zhuǎn)換,得到第二橋梁施工三維影像;
13、對(duì)所述第二橋梁施工三維影像進(jìn)行畫面像素輪廓識(shí)別處理,得到所述橋梁施工場(chǎng)地的所有橋梁構(gòu)件的第二邊緣輪廓分布狀態(tài)信息。
14、可選地,所述從高空角度對(duì)所述橋梁施工場(chǎng)地進(jìn)行掃描拍攝,包括:
15、提取每次掃描拍攝對(duì)應(yīng)的全景圖像;
16、對(duì)每相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像進(jìn)行相似度比較,獲取每相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像之間的相似度數(shù)值;
17、提取每相鄰兩次掃描時(shí)刻之間的掃描時(shí)間間隔;
18、利用所述每相鄰兩次掃描時(shí)刻之間的掃描時(shí)間間隔和每相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像之間的相似度數(shù)值獲取掃描時(shí)間間隔調(diào)節(jié)系數(shù);
19、其中,所述掃描時(shí)間間隔調(diào)節(jié)系數(shù)通過如下公式獲取:
20、
21、其中,k表示掃描時(shí)間間隔調(diào)節(jié)系數(shù);n表示每相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像的組數(shù);si表示第i組相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像的相似度數(shù)值;si+1表示第i+1組相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像的相似度數(shù)值;tgi表示第i組相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像的掃描時(shí)間間隔;tgi+1表示第i+1組相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像的掃描時(shí)間間隔;smin表示n組相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像的相似度數(shù)值最小值;tgmin表示n組相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像的相似度數(shù)值最小值對(duì)應(yīng)的掃描時(shí)間間隔;sb表示n組相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像的相似度數(shù)值標(biāo)準(zhǔn)差;tgb表示n組相鄰兩次掃描時(shí)刻對(duì)應(yīng)的掃描時(shí)間間隔標(biāo)準(zhǔn)差;
22、將所述掃描時(shí)間間隔調(diào)節(jié)系數(shù)與預(yù)設(shè)的調(diào)節(jié)系數(shù)閾值進(jìn)行比較;
23、當(dāng)所述掃描時(shí)間間隔調(diào)節(jié)系數(shù)低于預(yù)設(shè)的調(diào)節(jié)系數(shù)閾值,則不對(duì)掃描時(shí)間間隔進(jìn)行調(diào)整;
24、當(dāng)所述掃描時(shí)間間隔調(diào)節(jié)系數(shù)不低于預(yù)設(shè)的調(diào)節(jié)系數(shù)閾值,則調(diào)取掃描時(shí)間間隔調(diào)節(jié)系數(shù);
25、利用所述掃描時(shí)間間隔調(diào)節(jié)系數(shù)對(duì)所述掃描時(shí)間間隔進(jìn)行調(diào)節(jié),獲得調(diào)節(jié)后的掃描時(shí)間間隔;
26、其中,所述調(diào)節(jié)后的掃描時(shí)間間隔通過如下公式獲取:
27、
28、其中,tgt表示調(diào)節(jié)后的掃描時(shí)間間隔;tg表示調(diào)節(jié)前的掃描時(shí)間間隔;k表示掃描時(shí)間間隔調(diào)節(jié)系數(shù);k0表示預(yù)設(shè)的調(diào)節(jié)系數(shù)閾值;sk表示掃描時(shí)間間隔調(diào)節(jié)系數(shù)不低于預(yù)設(shè)的調(diào)節(jié)系數(shù)閾值時(shí)對(duì)應(yīng)的全景圖像與其對(duì)應(yīng)的上一次掃描拍攝的全景圖像之間的相似度數(shù)值;sp表示n組相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像的相似度數(shù)值平均值;
29、按照所述調(diào)節(jié)后的掃描時(shí)間間隔對(duì)所述橋梁施工場(chǎng)地進(jìn)行掃描拍攝。
30、可選地,將所述第一橋梁構(gòu)件存在狀態(tài)信息和所述第二橋梁構(gòu)件存在狀態(tài)信息上傳至ai平臺(tái),從中提取關(guān)于同一橋梁構(gòu)件對(duì)應(yīng)的第一位姿信息和第二位姿信息;基于所述第一位姿信息和所述第二位姿信息,判斷所述同一橋梁構(gòu)件是否處于正常位姿狀態(tài),包括:
31、將所述第一邊緣輪廓分布狀態(tài)信息和所述第二邊緣輪廓分布狀態(tài)信息上傳至ai平臺(tái),對(duì)所述第一邊緣輪廓分布狀態(tài)信息和所述第二邊緣輪廓分布狀態(tài)信息分別進(jìn)行ai識(shí)別,得到所述第一橋梁施工三維影像中所有橋梁構(gòu)件各自的邊緣輪廓空間分布信息以及所述第二橋梁施工三維影像中所有橋梁構(gòu)件各自的邊緣輪廓空間分布信息;
32、將所述第一橋梁施工影像中所有橋梁構(gòu)件各自的邊緣輪廓空間分布信息以及所述第二橋梁施工影像中所有橋梁構(gòu)件各自的邊緣輪廓空間分布信息進(jìn)行對(duì)比,提取關(guān)于同一橋梁構(gòu)件對(duì)應(yīng)的第一放置位姿信息和第二放置位姿信息;
33、將所述第一放置位姿信息和所述第二放置位姿信息整合到同一坐標(biāo)空間進(jìn)行對(duì)比,得到相應(yīng)的位姿偏差值;若所述位姿偏差值小于預(yù)設(shè)偏差閾值,則判斷所述同一橋梁構(gòu)件處于正常位姿狀態(tài);否則,判斷所述同一橋梁不處于正常位姿狀態(tài)。
34、可選地,當(dāng)所述同一橋梁構(gòu)件不處于正常位姿狀態(tài),則基于所述第一橋梁施工影像和所述第二橋梁施工影像,確定對(duì)所述同一橋梁構(gòu)件進(jìn)行位姿調(diào)整的操作參數(shù),并基于所述操作參數(shù)生成相應(yīng)的操作指令,以此發(fā)送至相應(yīng)的施工設(shè)備,包括:
35、當(dāng)所述同一橋梁構(gòu)件不處于正常位姿狀態(tài),則對(duì)所述第一橋梁施工三維影像和所述第二橋梁施工三維影像進(jìn)行分析,確定對(duì)所述同一橋梁構(gòu)件進(jìn)行位姿調(diào)整的六自由度調(diào)整參數(shù),并基于所述六自由度調(diào)整參數(shù)生成相應(yīng)的操作指令,對(duì)所述操作指令進(jìn)行加密處理后發(fā)送至相應(yīng)的施工設(shè)備。
36、基于ai平臺(tái)的橋梁施工監(jiān)測(cè)系統(tǒng),包括:
37、第一影像拍攝與分析模塊,用于從第一角度對(duì)橋梁施工場(chǎng)地進(jìn)行拍攝,得到第一橋梁施工影像;對(duì)所述第一橋梁施工影像進(jìn)行分析,得到所述橋梁施工場(chǎng)地的第一橋梁構(gòu)件存在狀態(tài)信息;
38、第二影像拍攝與分析模塊,用于從第二角度對(duì)所述橋梁施工場(chǎng)地進(jìn)行拍攝,得到第二橋梁施工影像;對(duì)所述第二橋梁施工影像進(jìn)行分析,得到所述橋梁施工場(chǎng)地的第二橋梁構(gòu)件存在狀態(tài)信息;
39、ai處理模塊,用于將所述第一橋梁構(gòu)件存在狀態(tài)信息和所述第二橋梁構(gòu)件存在狀態(tài)信息上傳至ai平臺(tái),從中提取關(guān)于同一橋梁構(gòu)件對(duì)應(yīng)的第一位姿信息和第二位姿信息;基于所述第一位姿信息和所述第二位姿信息,判斷所述同一橋梁構(gòu)件是否處于正常位姿狀態(tài);
40、橋梁構(gòu)件調(diào)整模塊,用于當(dāng)所述同一橋梁構(gòu)件不處于正常位姿狀態(tài),則基于所述第一橋梁施工影像和所述第二橋梁施工影像,確定對(duì)所述同一橋梁構(gòu)件進(jìn)行位姿調(diào)整的操作參數(shù),并基于所述操作參數(shù)生成相應(yīng)的操作指令,以此發(fā)送至相應(yīng)的施工設(shè)備。
41、可選地,所述第一影像拍攝與分析模塊用于從第一角度對(duì)橋梁施工場(chǎng)地進(jìn)行拍攝,得到第一橋梁施工影像;對(duì)所述第一橋梁施工影像進(jìn)行分析,得到所述橋梁施工場(chǎng)地的第一橋梁構(gòu)件存在狀態(tài)信息,包括:
42、從地面角度對(duì)橋梁施工場(chǎng)地進(jìn)行雙目拍攝,得到所述橋梁施工場(chǎng)地的雙目影像;基于所述雙目影像的雙目視差,生成第一橋梁施工三維影像;
43、對(duì)所述第一橋梁施工三維影像進(jìn)行畫面像素輪廓識(shí)別處理,得到所述橋梁施工場(chǎng)地的所有橋梁構(gòu)件的第一邊緣輪廓分布狀態(tài)信息。
44、可選地,所述第二影像拍攝與分析模塊用于從第二角度對(duì)所述橋梁施工場(chǎng)地進(jìn)行拍攝,得到第二橋梁施工影像;對(duì)所述第二橋梁施工影像進(jìn)行分析,得到所述橋梁施工場(chǎng)地的第二橋梁構(gòu)件存在狀態(tài)信息,包括:
45、從高空角度對(duì)所述橋梁施工場(chǎng)地進(jìn)行掃描拍攝,得到所述橋梁施工場(chǎng)地的全景影像;對(duì)所述全景影像進(jìn)行三維轉(zhuǎn)換,得到第二橋梁施工三維影像;
46、對(duì)所述第二橋梁施工三維影像進(jìn)行畫面像素輪廓識(shí)別處理,得到所述橋梁施工場(chǎng)地的所有橋梁構(gòu)件的第二邊緣輪廓分布狀態(tài)信息。
47、可選地,所述從高空角度對(duì)所述橋梁施工場(chǎng)地進(jìn)行掃描拍攝,包括:
48、提取每次掃描拍攝對(duì)應(yīng)的全景圖像;
49、對(duì)每相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像進(jìn)行相似度比較,獲取每相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像之間的相似度數(shù)值;
50、提取每相鄰兩次掃描時(shí)刻之間的掃描時(shí)間間隔;
51、利用所述每相鄰兩次掃描時(shí)刻之間的掃描時(shí)間間隔和每相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像之間的相似度數(shù)值獲取掃描時(shí)間間隔調(diào)節(jié)系數(shù);
52、其中,所述掃描時(shí)間間隔調(diào)節(jié)系數(shù)通過如下公式獲取:
53、
54、其中,k表示掃描時(shí)間間隔調(diào)節(jié)系數(shù);n表示每相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像的組數(shù);si表示第i組相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像的相似度數(shù)值;si+1表示第i+1組相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像的相似度數(shù)值;tgi表示第i組相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像的掃描時(shí)間間隔;tgi+1表示第i+1組相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像的掃描時(shí)間間隔;smin表示n組相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像的相似度數(shù)值最小值;tgmin表示n組相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像的相似度數(shù)值最小值對(duì)應(yīng)的掃描時(shí)間間隔;sb表示n組相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像的相似度數(shù)值標(biāo)準(zhǔn)差;tgb表示n組相鄰兩次掃描時(shí)刻對(duì)應(yīng)的掃描時(shí)間間隔標(biāo)準(zhǔn)差;
55、將所述掃描時(shí)間間隔調(diào)節(jié)系數(shù)與預(yù)設(shè)的調(diào)節(jié)系數(shù)閾值進(jìn)行比較;
56、當(dāng)所述掃描時(shí)間間隔調(diào)節(jié)系數(shù)低于預(yù)設(shè)的調(diào)節(jié)系數(shù)閾值,則不對(duì)掃描時(shí)間間隔進(jìn)行調(diào)整;
57、當(dāng)所述掃描時(shí)間間隔調(diào)節(jié)系數(shù)不低于預(yù)設(shè)的調(diào)節(jié)系數(shù)閾值,則調(diào)取掃描時(shí)間間隔調(diào)節(jié)系數(shù);
58、利用所述掃描時(shí)間間隔調(diào)節(jié)系數(shù)對(duì)所述掃描時(shí)間間隔進(jìn)行調(diào)節(jié),獲得調(diào)節(jié)后的掃描時(shí)間間隔;
59、其中,所述調(diào)節(jié)后的掃描時(shí)間間隔通過如下公式獲取:
60、
61、其中,tgt表示調(diào)節(jié)后的掃描時(shí)間間隔;tg表示調(diào)節(jié)前的掃描時(shí)間間隔;k表示掃描時(shí)間間隔調(diào)節(jié)系數(shù);k0表示預(yù)設(shè)的調(diào)節(jié)系數(shù)閾值;sk表示掃描時(shí)間間隔調(diào)節(jié)系數(shù)不低于預(yù)設(shè)的調(diào)節(jié)系數(shù)閾值時(shí)對(duì)應(yīng)的全景圖像與其對(duì)應(yīng)的上一次掃描拍攝的全景圖像之間的相似度數(shù)值;sp表示n組相鄰兩次掃描時(shí)刻對(duì)應(yīng)的全景圖像的相似度數(shù)值平均值;
62、按照所述調(diào)節(jié)后的掃描時(shí)間間隔對(duì)所述橋梁施工場(chǎng)地進(jìn)行掃描拍攝。
63、可選地,所述ai處理模塊用于將所述第一橋梁構(gòu)件存在狀態(tài)信息和所述第二橋梁構(gòu)件存在狀態(tài)信息上傳至ai平臺(tái),從中提取關(guān)于同一橋梁構(gòu)件對(duì)應(yīng)的第一位姿信息和第二位姿信息;基于所述第一位姿信息和所述第二位姿信息,判斷所述同一橋梁構(gòu)件是否處于正常位姿狀態(tài),包括:
64、將所述第一邊緣輪廓分布狀態(tài)信息和所述第二邊緣輪廓分布狀態(tài)信息上傳至ai平臺(tái),對(duì)所述第一邊緣輪廓分布狀態(tài)信息和所述第二邊緣輪廓分布狀態(tài)信息分別進(jìn)行ai識(shí)別,得到所述第一橋梁施工三維影像中所有橋梁構(gòu)件各自的邊緣輪廓空間分布信息以及所述第二橋梁施工三維影像中所有橋梁構(gòu)件各自的邊緣輪廓空間分布信息;
65、將所述第一橋梁施工影像中所有橋梁構(gòu)件各自的邊緣輪廓空間分布信息以及所述第二橋梁施工影像中所有橋梁構(gòu)件各自的邊緣輪廓空間分布信息進(jìn)行對(duì)比,提取關(guān)于同一橋梁構(gòu)件對(duì)應(yīng)的第一放置位姿信息和第二放置位姿信息;
66、將所述第一放置位姿信息和所述第二放置位姿信息整合到同一坐標(biāo)空間進(jìn)行對(duì)比,得到相應(yīng)的位姿偏差值;若所述位姿偏差值小于預(yù)設(shè)偏差閾值,則判斷所述同一橋梁構(gòu)件處于正常位姿狀態(tài);否則,判斷所述同一橋梁不處于正常位姿狀態(tài)。
67、可選地,所述橋梁構(gòu)件調(diào)整模塊用于當(dāng)所述同一橋梁構(gòu)件不處于正常位姿狀態(tài),則基于所述第一橋梁施工影像和所述第二橋梁施工影像,確定對(duì)所述同一橋梁構(gòu)件進(jìn)行位姿調(diào)整的操作參數(shù),并基于所述操作參數(shù)生成相應(yīng)的操作指令,以此發(fā)送至相應(yīng)的施工設(shè)備,包括:
68、當(dāng)所述同一橋梁構(gòu)件不處于正常位姿狀態(tài),則對(duì)所述第一橋梁施工三維影像和所述第二橋梁施工三維影像進(jìn)行分析,確定對(duì)所述同一橋梁構(gòu)件進(jìn)行位姿調(diào)整的六自由度調(diào)整參數(shù),并基于所述六自由度調(diào)整參數(shù)生成相應(yīng)的操作指令,對(duì)所述操作指令進(jìn)行加密處理后發(fā)送至相應(yīng)的施工設(shè)備。
69、與現(xiàn)有技術(shù)相比,本發(fā)明具有如下有益效果:
70、本技術(shù)提供的基于ai平臺(tái)的橋梁施工監(jiān)測(cè)方法和系統(tǒng)從第一角度和第二角度分別對(duì)橋梁施工場(chǎng)地進(jìn)行拍攝,得到相應(yīng)的橋梁施工影像,并分析相應(yīng)的橋梁施工影像,得到第一橋梁構(gòu)件存在狀態(tài)信息和第二橋梁構(gòu)件存在狀態(tài)信息,對(duì)橋梁構(gòu)件進(jìn)行多視角的定位識(shí)別;對(duì)第一橋梁構(gòu)件存在狀態(tài)信息和第二橋梁構(gòu)件存在狀態(tài)信息進(jìn)行ai分析,得到關(guān)于同一構(gòu)件對(duì)應(yīng)的第一位姿信息和第二位姿信息,以此判斷同一橋梁構(gòu)件是否處于正常位姿狀態(tài),提高對(duì)橋梁構(gòu)件位姿狀態(tài)檢測(cè)的準(zhǔn)確性;當(dāng)同一橋梁構(gòu)件不處于正常位姿狀態(tài),確定對(duì)同一橋梁構(gòu)件進(jìn)行位姿調(diào)整的操作參數(shù),以此生成操作指令并發(fā)送至施工設(shè)備,便于施工設(shè)備對(duì)橋梁構(gòu)件進(jìn)行及時(shí)準(zhǔn)確的位姿調(diào)整,減少橋梁構(gòu)件的定位工作量。
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!