一種方向盤偏轉角度的校正方法及裝置與流程
本發明屬于方向盤調整,尤其涉及一種方向盤偏轉角度的校正方法及裝置。
背景技術:
1、汽車的方向盤具有上下調節的功能,從而適應不同身高的駕駛員,其中,對通過節叉依次連接的轉向器、中間軸和管柱進行調節,從而實現對方向盤的上下調節。然而,由于轉向器、中間軸和管柱等器件都與萬向節進行連接,當方向盤上下調節時,通常會導致方向盤角度發生偏轉,從而帶來安全隱患,例如方向盤偏轉角度過大會導致管柱的機械零位與汽車的電子助力轉向的標定零位匹配錯位,在車輛直行時出現車輛跑偏或者方向盤不正的情況,對駕駛員的駕駛帶來了隱患。因此,解決因方向盤上下調整而導致的方向盤角度偏轉問題,對于車輛安全駕駛具有重要意義。
2、目前的方向盤偏轉角度校正方法,通常是依賴于動力學仿真軟件,通過建立真實的轉向系統模型來分析和改進方向盤上下調整導致的方向盤角度偏轉問題,但是為了建立的真實轉向系統模型,需要采集方向盤上下調節過程中所涉及的部件的各種參數,之后再以此為基礎構建轉向系統模型,這使得轉向系統模型中包含了過多與方向盤角度偏轉無關的數據,提高了轉向系統模型的復雜度,這不僅增加了開發時間和成本,還使得對轉向模型的調整過程復雜化,最終導致了方向盤偏轉角度校正的效率低下、成本較高和開發周期長,因此,目前亟需一種方向盤偏轉角度的校正方法及裝置來解決現有技術的問題。
技術實現思路
1、本發明旨在提供一種方向盤偏轉角度的校正方法及裝置,以解決上述技術問題,以與方向盤轉向相關的夾角集合和偏轉角度構建方向盤轉向模型,對方向盤轉向模型進行仿真實現對方向盤偏轉角度的校正,提高方向盤偏轉角度的校正效率。
2、為了解決上述技術問題,本發明實施例提供了一種方向盤偏轉角度的校正方法,包括:
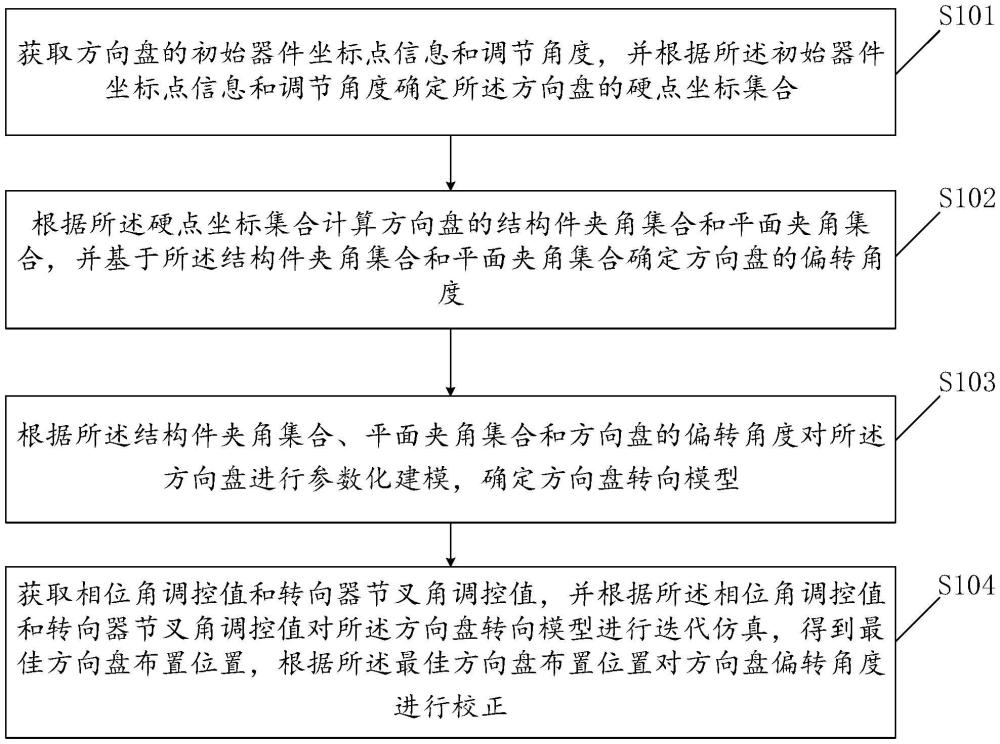
3、獲取方向盤的初始器件坐標點信息和調節角度,并根據所述初始器件坐標點信息和調節角度確定所述方向盤的硬點坐標集合;
4、根據所述硬點坐標集合計算方向盤的結構件夾角集合和平面夾角集合,并基于所述結構件夾角集合和平面夾角集合確定方向盤的偏轉角度;
5、根據所述結構件夾角集合、平面夾角集合和方向盤的偏轉角度對所述方向盤進行參數化建模,確定方向盤轉向模型;
6、獲取相位角調控值和轉向器節叉角調控值,并根據所述相位角調控值和轉向器節叉角調控值對所述方向盤轉向模型進行迭代仿真,得到最佳方向盤布置位置,根據所述最佳方向盤布置位置對方向盤偏轉角度進行校正。
7、可以理解的是,相對于現有技術,本發明以方向盤的初始器件坐標點信息和方向盤上下調節的調節角度構建方向盤的硬點坐標集合,并基于硬點坐標集合確定與方向盤偏轉角度相關的結構件夾角集合和平面夾角集合,進而確定了偏轉角度,以此構建了方向盤轉向模型,使得方向盤轉向模型僅保留了與方向盤角度偏轉相關的數據,降低了方向盤轉向模型的復雜度,進而提高了方向盤轉向模型的構建效率,還避免了方向盤轉向模型仿真過程中的多余計算,縮短了仿真的需求時間,通過相位角調控值和轉向器節叉角調控值對方向盤轉向模型進行仿真,能夠靈活的調整影響方向盤偏轉的因素,從而避免了頻繁更改方向盤模型導致的優化流程長,提高了仿真的效率,進而提高了方向盤偏轉角度的校正效率。
8、作為優選方案,所述獲取方向盤的初始器件坐標點信息和調節角度,并根據所述初始器件坐標點信息和調節角度確定所述方向盤的硬點坐標集合,具體包括:
9、獲取方向盤的初始器件坐標點信息和調節角度,其中,所述初始器件坐標點信息包括:初始轉向器連接點坐標、初始中間軸下點坐標、初始中間軸上點坐標、初始方向盤盤心點坐標和管柱旋轉中心點坐標;
10、根據所述調節角度、初始中間軸上點坐標、初始方向盤盤心點坐標和管柱旋轉中心點坐標計算方向盤調節后的第一中間軸上點坐標和第一方向盤盤心點坐標;
11、根據所述初始轉向器連接點坐標、初始中間軸下點坐標、第一中間軸上點坐標、初始中間軸上點坐標、初始方向盤盤心點坐標、第一方向盤盤心點坐標和管柱旋轉中心點坐標,確定所述方向盤的硬點坐標集合。
12、本優選方案通過方向盤的初始器件坐標點信息和調節角度準確的計算了方向盤上下調節后的第一中間軸上點坐標和第一方向盤盤心點坐標,從而能夠構建方向盤上下調節前后的硬點坐標集合,為后續方向盤偏轉角度的計算和方向盤轉向模型的構建提供準確的數據基礎,提高了方向盤轉向模型的構建準確性和效率。
13、作為優選方案,所述根據所述硬點坐標集合計算方向盤的結構件夾角集合和平面夾角集合,并基于所述結構件夾角集合和平面夾角集合確定方向盤的偏轉角度,具體包括:
14、根據所述硬點坐標集合確定結構件向量集合,并根據所述結構件向量集合確定所述方向盤的結構件夾角集合;
15、根據所述結構件夾角集合和結構件向量集合確定方向盤的平面夾角集合;其中,所述平面夾角集合包括:第四夾角;
16、根據所述結構件夾角集合和平面夾角集合對所述第四夾角進行坐標轉換,確定方向盤的偏轉角度。
17、本優選方案通過硬點坐標集合確定方向盤的結構件夾角集合和平面夾角集合,再以結構件夾角集合和平面夾角集合確定方向盤的偏轉角度,通過硬點坐標結合和簡單的坐標運算確定偏轉角度,簡化了偏轉角度的計算過程,進而提高了偏轉角度的計算效率,提高了后續方向盤偏轉角度校正的效率。
18、作為優選方案,所述根據所述硬點坐標集合確定結構件向量集合,并根據所述結構件向量集合確定所述方向盤的結構件夾角集合,具體包括:
19、所述方向盤包括:轉向器、中間軸和管柱;
20、根據所述硬點坐標集合確定方向盤的結構件向量集合;
21、根據所述初始轉向器連接點坐標、初始中間軸下點坐標、初始中間軸上點坐標和第一中間軸上點坐標確定第一平面;
22、根據所述初始中間軸下點坐標、第一中間軸上點坐標、初始第一方向盤盤心點坐標和第一方向盤盤心點坐標確定第二平面;
23、根據所述結構件向量集合計算所述轉向器與中間軸之間的第一結構件夾角,以及所述中間軸與管柱之間的第二結構件夾角;
24、根據所述結構件向量集合計算第一平面與第二平面之間的第一平面夾角;
25、根據所述第一結構件夾角、第二結構件夾角和第一平面夾角確定方向盤的結構件夾角集合。
26、本優選方案通過硬件坐標集合構建結構件向量集合,以坐標點計算的方式快速的確定了方向盤上下調節前后的結構件夾角集合,提高了后續方向盤偏轉角度的計算效率,進而提高了方向盤偏轉角度校正的效率。
27、作為優選方案,所述根據所述結構件夾角集合和結構件向量集合確定方向盤的平面夾角集合,具體包括:
28、根據所述硬點坐標集合獲取所述轉向器的連接點端節叉與所述第一平面的轉向器節叉角;
29、根據預設三角函數對所述轉向器節叉角和第一結構件夾角進行計算,得到所述中間軸的下點端節叉與所述第一平面之間的第二夾角;
30、獲取中間軸的上點端節叉和下點端節叉之間的相位角,并根據所述第二結構件夾角、第一平面夾角和所述相位角確定所述中間軸的上點端節叉與所述第二平面之間的第三夾角;
31、根據預設三角函數對所述第三夾角和所述第二結構件夾角進行計算,確定所述管柱的端節叉與所述第二平面的第四夾角;
32、根據所述第四夾角、轉向器節叉角、第三夾角和第二夾角確定方向盤的平面夾角集合。
33、本優選方案通過結構件夾角和結構件向量集合,以三角函數的形式計算平面夾角集合,簡化了方向盤的平面夾角集合的計算過程,提高了其計算效率,進而提高了后續方向盤偏轉角度校正的效率。
34、作為優選方案,所述根據所述結構件夾角集合和平面夾角集合對所述第四夾角進行坐標轉換,確定方向盤的偏轉角度,具體包括:
35、根據預設坐標系方法構建整車坐標系,并將所述第四夾角轉換為整車坐標系中的旋轉夾角;
36、基于所述旋轉夾角確定方向盤的偏轉角度。
37、本優選方案通過構建整車坐標系,并以整車坐標系確定方向盤的偏轉角度,使得方向盤偏轉角度更加符合車輛實際行駛的情況,提高了后續方向盤偏轉角度校正的準確性。
38、作為優選方案,所述根據所述結構件夾角集合、平面夾角集合和方向盤的偏轉角度對所述方向盤進行參數化建模,確定方向盤轉向模型,具體包括:
39、根據所述結構件夾角集合確定設計狀態層,根據所述平面夾角集合確定參數化計算層,根據所述方向盤的偏轉角度確定坐標系轉換層;
40、根據所述設計狀態層、參數化計算層和坐標系轉換層確定方向盤轉向模型。
41、本優選方案通過結構件夾角集合、平面夾角集合和方向盤的偏轉角度對所述方向盤進行參數化建模,確定方向盤轉向模型,使得方向盤轉向模型僅保留了與方向盤角度偏轉相關的數據,降低了方向盤轉向模型的復雜度,進而提高了方向盤轉向模型的構建效率,還避免了方向盤轉向模型仿真過程中的多余計算,縮短了仿真的需求時間,提高了方向盤偏轉角度校正的效率。
42、作為優選方案,所述對所述方向盤轉向模型進行迭代仿真,得到最佳方向盤布置位置,根據所述最佳方向盤布置位置對方向盤偏轉角度進行校正,具體包括:
43、獲取用戶輸入的相位角調控值和轉向器節叉角調控值;
44、根據所述相位角調控值和轉向器節叉角調控值確定仿真固定值和仿真變量值;基于所述仿真固定值和仿真變量值對所述方向盤轉向模型進行迭代仿真,獲取方向盤偏轉角度變化曲線;
45、基于所述方向盤偏轉角度變化曲線獲取最佳方向盤布置位置,并根據所述最佳方向盤布置位置調整方向盤的布置位置,以完成對方向盤偏轉角度的校正。
46、本優選方案通過相位角調控值和轉向器節叉角調控值對方向盤轉向模型進行仿真,能夠靈活的調整影響方向盤偏轉的因素,從而避免了頻繁更改方向盤模型導致的優化流程長,提高了仿真的效率,進而提高了方向盤偏轉角度的校正效率。
47、相應的,本發明實施例提供了一種方向盤偏轉角度的校正裝置,包括:硬點坐標獲取模塊、偏轉角度獲取模塊、方向盤轉向模型構建模塊和偏轉角度校正模塊;
48、其中,所述硬點坐標獲取模塊用于獲取方向盤的初始器件坐標點信息和調節角度,并根據所述初始器件坐標點信息和調節角度確定所述方向盤的硬點坐標集合;
49、所述偏轉角度獲取模塊用于根據所述硬點坐標集合計算方向盤的結構件夾角集合和平面夾角集合,并基于所述結構件夾角集合和平面夾角集合確定方向盤的偏轉角度;
50、所述方向盤轉向模型構建模塊用于根據所述結構件夾角集合、平面夾角集合和方向盤的偏轉角度對所述方向盤進行參數化建模,確定方向盤轉向模型;
51、所述偏轉角度校正模塊用于對所述方向盤轉向模型進行迭代仿真,得到最佳方向盤布置位置,根據所述最佳方向盤布置位置對方向盤偏轉角度進行校正。
52、作為優選方案,所述硬點坐標獲取模塊,包括:硬點坐標獲取單元;
53、所述硬點坐標獲取單元用于獲取方向盤的初始器件坐標點信息和調節角度,其中,所述初始器件坐標點信息包括:初始轉向器連接點坐標、初始中間軸下點坐標、初始中間軸上點坐標、初始方向盤盤心點坐標和管柱旋轉中心點坐標;
54、根據所述調節角度、初始中間軸上點坐標、初始方向盤盤心點坐標和管柱旋轉中心點坐標計算方向盤調節后的第一中間軸上點坐標和第一方向盤盤心點坐標;
55、根據所述初始轉向器連接點坐標、初始中間軸下點坐標、第一中間軸上點坐標、初始中間軸上點坐標、初始方向盤盤心點坐標、第一方向盤盤心點坐標和管柱旋轉中心點坐標,確定所述方向盤的硬點坐標集合。
56、可以理解的是,相對于現有技術,本裝置方向盤的初始器件坐標點信息和方向盤上下調節的調節角度,從而構建方向盤的硬點坐標集合,并基于硬點坐標集合確定與方向盤偏轉角度相關的結構件夾角集合和平面夾角集合,進而確定了偏轉角度,以此構建了方向盤轉向模型,使得方向盤轉向模型僅保留了與方向盤角度偏轉相關的數據,降低了方向盤轉向模型的復雜度,進而提高了方向盤轉向模型的構建效率,還避免了方向盤轉向模型仿真過程中的多余計算,縮短了仿真的需求時間,通過相位角調控值和轉向器節叉角調控值對方向盤轉向模型進行仿真,能夠靈活的調整影響方向盤偏轉的因素,從而避免了頻繁更改方向盤模型導致的優化流程長,提高了仿真的效率,進而提高了方向盤偏轉角度的校正效率。
- 還沒有人留言評論。精彩留言會獲得點贊!