一種文物三維數(shù)字采集方法及裝置與流程
本發(fā)明涉及文物三維數(shù)字采集,特別是一種文物三維數(shù)字采集方法及裝置。
背景技術(shù):
1、文物三維數(shù)字采集是指利用現(xiàn)代三維掃描技術(shù)和圖像處理技術(shù),對文物進(jìn)行高精度的數(shù)字化記錄和重建,其目的是為了保存文物的精確幾何形狀、紋理細(xì)節(jié)等信息,便于后續(xù)的研究、保護(hù)、展示和修復(fù)工作,主要技術(shù)手段包括激光雷達(dá)(lidar)、多視角立體視覺(mvs)、結(jié)構(gòu)光掃描、高分辨率相機(jī)拍攝等。
2、在文物三維數(shù)字采集技術(shù)領(lǐng)域,傳統(tǒng)的文物三維數(shù)字采集方法由于設(shè)備精度不足或環(huán)境因素導(dǎo)致數(shù)據(jù)噪聲大、異常值多,影響最終模型的質(zhì)量,且傳統(tǒng)方法在提取文物表面粗糙度和形狀偏差等關(guān)鍵特征時,因缺乏有效的計算方法而導(dǎo)致結(jié)果不準(zhǔn)確,同時現(xiàn)有方法中單一數(shù)據(jù)源的三維重建難以捕捉文物的全部細(xì)節(jié),特別是在復(fù)雜幾何特征和表面紋理方面。
技術(shù)實現(xiàn)思路
1、鑒于上述現(xiàn)有存在的問題,提出了本發(fā)明。
2、因此,本發(fā)明提供了一種文物三維數(shù)字采集方法及裝置解決傳統(tǒng)的文物三維數(shù)字采集方法由于設(shè)備精度不足或環(huán)境因素導(dǎo)致數(shù)據(jù)噪聲大、異常值多,影響最終模型的質(zhì)量,且傳統(tǒng)方法在提取文物表面粗糙度和形狀偏差等關(guān)鍵特征時,因缺乏有效的計算方法而導(dǎo)致結(jié)果不準(zhǔn)確的問題。
3、為解決上述技術(shù)問題,本發(fā)明提供如下技術(shù)方案:
4、第一方面,本發(fā)明提供了一種文物三維數(shù)字采集方法,其包括:
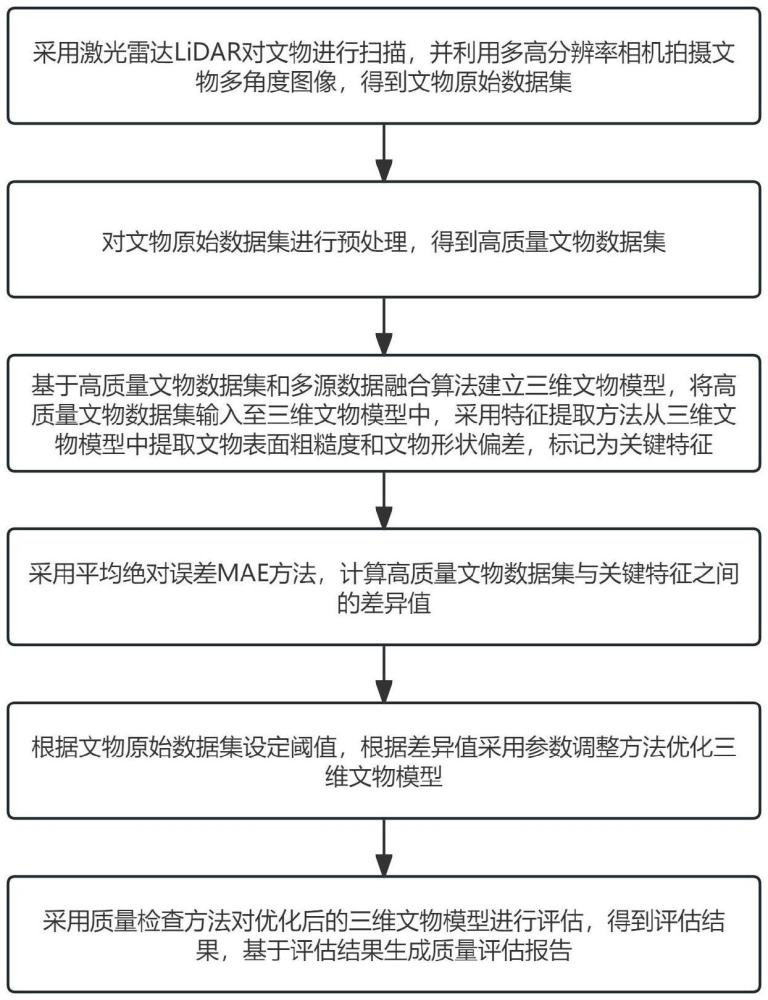
5、采用激光雷達(dá)lidar對文物進(jìn)行掃描,并利用多高分辨率相機(jī)拍攝文物多角度圖像,得到文物原始數(shù)據(jù)集;
6、對文物原始數(shù)據(jù)集進(jìn)行預(yù)處理,得到高質(zhì)量文物數(shù)據(jù)集;
7、基于高質(zhì)量文物數(shù)據(jù)集和多源數(shù)據(jù)融合算法建立三維文物模型,將高質(zhì)量文物數(shù)據(jù)集輸入至三維文物模型中,采用特征提取方法從三維文物模型中提取文物表面粗糙度和文物形狀偏差,標(biāo)記為關(guān)鍵特征;
8、采用平均絕對誤差mae方法,計算高質(zhì)量文物數(shù)據(jù)集與關(guān)鍵特征之間的差異值;
9、根據(jù)文物原始數(shù)據(jù)集設(shè)定閾值,根據(jù)差異值采用參數(shù)調(diào)整方法優(yōu)化三維文物模型;
10、采用質(zhì)量檢查方法對優(yōu)化后的三維文物模型進(jìn)行評估,得到評估結(jié)果,基于評估結(jié)果生成質(zhì)量評估報告
11、作為本發(fā)明所述一種文物三維數(shù)字采集方法的一種優(yōu)選方案,其中:所述采用激光雷達(dá)lidar對文物進(jìn)行掃描,并利用多高分辨率相機(jī)拍攝文物多角度圖像,得到文物原始數(shù)據(jù)集,具體步驟為:
12、部署高精度激光雷達(dá)lidar設(shè)備圍繞文物進(jìn)行全面掃描,通過發(fā)射激光脈沖并測量反射時間,得到lidar點云數(shù)據(jù);
13、在文物周圍部署多高分辨率相機(jī),從不同角度對文物進(jìn)行拍攝,獲得文物相機(jī)圖像數(shù)據(jù);
14、將lidar點云數(shù)據(jù)通過外參矩陣投影到相機(jī)圖像平面,得到每個測量點對應(yīng)的像素坐標(biāo);
15、將lidar點云數(shù)據(jù)構(gòu)建成kd樹,利用kd樹定位對每個像素坐標(biāo)找到最鄰近的lidar測量點,基于lidar測量點利用插值算法得到其與像素坐標(biāo)之間的幾何關(guān)系,得到該像素坐標(biāo)對應(yīng)的顏色和深度;
16、采用直接映射法將該像素坐標(biāo)對應(yīng)的顏色和深度結(jié)合,并生成深度圖和彩色圖像的融合數(shù)據(jù);
17、將生成深度圖和彩色圖像的融合數(shù)據(jù)存儲在多通道圖像中,形成文物原始數(shù)據(jù)集。
18、作為本發(fā)明所述一種文物三維數(shù)字采集方法的一種優(yōu)選方案,其中:所述對文物原始數(shù)據(jù)進(jìn)行預(yù)處理,得到高質(zhì)量文物數(shù)據(jù)集,具體步驟為:
19、通過同步控制方法對文物原始數(shù)據(jù)集中的lidar點云數(shù)據(jù)與文物相機(jī)圖像數(shù)據(jù)進(jìn)行時間同步,得到時間同步后的文物數(shù)據(jù)集;
20、結(jié)合局部均值濾波和局部離群點檢測方法對時間同步后的文物數(shù)據(jù)集進(jìn)行去噪過濾和異常值檢測;
21、通過多視角數(shù)據(jù)融合技術(shù),從文物相機(jī)圖像數(shù)據(jù)中提取文物表面紋理和顏色;
22、填充lidar點云數(shù)據(jù)中的缺失部分,并得到預(yù)處理后的高質(zhì)量文物數(shù)據(jù)集,表達(dá)式為:
23、
24、其中,q表示高質(zhì)量文物數(shù)據(jù)集,表示lidar點云數(shù)據(jù),表示從不同視角拍攝的高分辨率相機(jī)圖像數(shù)據(jù)集合,k表示不同的相機(jī)視角,k是相機(jī)數(shù)量,fusion表示多視角數(shù)據(jù)融合算法。
25、作為本發(fā)明所述一種文物三維數(shù)字采集方法的一種優(yōu)選方案,其中:所述基于高質(zhì)量文物數(shù)據(jù)集和多源數(shù)據(jù)融合算法建立三維文物模型,將高質(zhì)量文物數(shù)據(jù)集輸入至三維文物模型中,采用特征提取方法從三維文物模型中提取文物表面粗糙度和文物形狀偏差,標(biāo)記為關(guān)鍵特征,具體步驟為:
26、采用多視圖立體視覺算法mvs和高質(zhì)量文物數(shù)據(jù)集建立三維文物模型,表達(dá)式為:
27、
28、其中,h表示三維文物模型,表示相機(jī)圖像的顏色強(qiáng)度,o代表由高質(zhì)量數(shù)據(jù)集q中提供的平均光照強(qiáng)度,α和β分別是控制顏色與光照強(qiáng)度之間轉(zhuǎn)換關(guān)系參數(shù),γ是權(quán)重因子,l(θ,ρ)表示計算三維文物模型中每個點光照效果的函數(shù),da表示現(xiàn)實文物表面上的一個區(qū)域,d表示從觀測點到文物表面的距離,δ是一個比例因子;
29、對三維文物模型進(jìn)行法線估計normal?estimation,得到每個點的法線方向;
30、基于法線方向,使用主成分分析方法計算三維文物模型中每個點的局部曲率分布;
31、根據(jù)局部曲率分布,計算三維文物模型中文物表面粗糙度r,表達(dá)式為:
32、
33、其中,ci表示三維文物模型中第i個參與計算的點的局部曲率,i是三維文物模型中參與計算的點的索引變量,c表示所有點的平均曲率,∝表示計算表面粗糙度點的數(shù)量;
34、采用歐幾里得距離度量方法計算三維文物模型中文物形狀偏差s,表達(dá)式為:
35、
36、其中,s表示文物形狀偏差,a表示文物表面區(qū)域的總面積,x,y,z分別表示現(xiàn)實文物表面任意一點的坐標(biāo),x',y',z'分別表示三維文物模型中對應(yīng)點的坐標(biāo),da表示現(xiàn)實文物表面上的一個區(qū)域;
37、將文物表面粗糙度r和文物形狀偏差s標(biāo)記為關(guān)鍵特征。
38、作為本發(fā)明所述一種文物三維數(shù)字采集方法的一種優(yōu)選方案,其中:所述采用平均絕對誤差mae方法,計算高質(zhì)量文物數(shù)據(jù)集與關(guān)鍵特征之間的差異值,具體步驟為:
39、采用平均絕對誤差mae計算三維文物模型中文物表面粗糙度r的差異值和文物形狀偏差s的差異值,表達(dá)式為:
40、
41、其中,i表示三維文物模型中參與計算的點的索引變量,gr表示表面粗糙度差異,gs表示形狀偏差差異,qr(i)表示高質(zhì)量文物數(shù)據(jù)集中第i個參與計算的點的表面粗糙度,qs(i)表示高質(zhì)量文物數(shù)據(jù)集中第i個參與計算的點的形狀偏差,r(i)表示三維文物模型中第i個參與計算的點的表面粗糙度,s(i)表示三維文物模型中第i個參與計算的點的形狀偏差,δ表示三維文物模型中參與計算的點的數(shù)量;
42、采用加權(quán)平均方法計算表面粗糙度差異gr和形狀偏差差異gs的綜合差異值,表達(dá)式為:
43、
44、其中,g表示綜合差異值,wr表示表面粗糙度差異的權(quán)重,ws表示形狀偏差差異的權(quán)重,gr表示表面粗糙度差異,gs表示形狀偏差差異。
45、作為本發(fā)明所述一種文物三維數(shù)字采集方法的一種優(yōu)選方案,其中:所述根據(jù)文物原始數(shù)據(jù)集設(shè)定閾值,根據(jù)差異值采用參數(shù)調(diào)整方法優(yōu)化三維文物模型,具體步驟為:
46、設(shè)定綜合差異閾值π,與綜合差異值g進(jìn)行比對;
47、當(dāng)g≤π時,表示三維文物模型質(zhì)量良好,無需進(jìn)一步調(diào)整;
48、當(dāng)g>π時,表示三維文物模型存在不一致性,存在問題區(qū)域,并對三維文物模型進(jìn)行優(yōu)化;
49、采用全局注冊算法捕捉三維文物模型中的初始旋轉(zhuǎn)矩陣v和初始平移向量∩;
50、采用迭代優(yōu)化算法調(diào)整三維文物模型中的初始旋轉(zhuǎn)矩陣v和初始平移向量∩,得到優(yōu)化后的三維文物模型,表達(dá)式為:
51、vnew=v·exp(δr);
52、∩new=∩+δt;
53、其中,exp(δr)表示基于增量δr的指數(shù)映射,exp表示指數(shù)函數(shù),δt表示平移增量,v表示初始旋轉(zhuǎn)矩陣,∩表示初始平移向量,vnew表示優(yōu)化后的旋轉(zhuǎn)矩陣,∩new表示優(yōu)化后的平移向量。
54、作為本發(fā)明所述一種文物三維數(shù)字采集方法的一種優(yōu)選方案,其中:所述采用質(zhì)量檢查方法對優(yōu)化后的三維文物模型進(jìn)行分析,得到分析結(jié)果,基于分析結(jié)果生成質(zhì)量評估報告,具體步驟為:
55、基于優(yōu)化后的三維文物模型,重新輸入綜合差異值gnew,并與綜合差異閾值π進(jìn)行重新比對,設(shè)定迭代次數(shù),直至滿足gnew≤π或者達(dá)到迭代次數(shù)時,則停止優(yōu)化;
56、采用質(zhì)量檢查方法標(biāo)記所有超出綜合差異閾值π的異常點,運(yùn)行cloudcompare分析軟件分析表面粗糙度差異gr和形狀偏差差異的分布情況gs,同時測量三維文物模型的幾何形狀相對于參考模型之間的偏差值,得到分析結(jié)果;
57、對分析結(jié)果進(jìn)行匯總,得到評估報告。
58、第二方面,本發(fā)明提供了一種文物三維數(shù)字采集裝置,包括:數(shù)據(jù)采集模塊、數(shù)據(jù)處理模塊、特征提取模塊、評估優(yōu)化模塊以及報告生成模塊;
59、所述數(shù)據(jù)采集模塊,用于采用激光雷達(dá)lidar對文物進(jìn)行全面掃描,并利用多高分辨率相機(jī)拍攝文物多角度圖像,得到文物原始數(shù)據(jù)集;
60、所述數(shù)據(jù)預(yù)處理模塊,用于對文物原始數(shù)據(jù)集進(jìn)行預(yù)處理,以去除噪聲和異常值,得到高質(zhì)量文物數(shù)據(jù)集;
61、所述特征提取模塊,用于基于高質(zhì)量文物數(shù)據(jù)集和多源數(shù)據(jù)融合算法建立三維文物模型,并采用特征提取方法從三維文物模型中提取關(guān)鍵特征;
62、所述評估優(yōu)化模塊,采用平均絕對誤差mae方法計算高質(zhì)量文物數(shù)據(jù)集與關(guān)鍵特征之間的差異值;
63、所述報告生成模塊,用于對優(yōu)化后的三維文物模型進(jìn)行質(zhì)量檢查,標(biāo)記所有超出綜合差異閾值的異常點,分析表面粗糙度差異和形狀偏差差異的分布情況,并基于分析結(jié)果生成質(zhì)量評估報告。
64、第三方面,本發(fā)明提供了一種計算機(jī)設(shè)備,包括存儲器和處理器,所述存儲器存儲有計算機(jī)程序,其中:所述計算機(jī)程序被處理器執(zhí)行時實現(xiàn)如本發(fā)明第一方面所述的一種文物三維數(shù)字采集方法的任一步驟。
65、第四方面,本發(fā)明提供了一種計算機(jī)可讀存儲介質(zhì),其上存儲有計算機(jī)程序,其中:所述計算機(jī)程序被處理器執(zhí)行時實現(xiàn)如本發(fā)明第一方面所述的一種文物三維數(shù)字采集方法的任一步驟。
66、本發(fā)明有益效果為:通過lidar和多高分辨率相機(jī)的結(jié)合使用,不僅提高了數(shù)據(jù)的精度和完整性,還增強(qiáng)了對復(fù)雜結(jié)構(gòu)和細(xì)微特征的捕捉能力,減少了信息遺漏的風(fēng)險,采用先進(jìn)的多源數(shù)據(jù)融合和幾何配準(zhǔn)技術(shù),不僅提升了模型的幾何精度,還保證了紋理映射的逼真度,使得三維文物模型能夠真實反映文物的實際形態(tài)和細(xì)節(jié),便于后續(xù)的研究和展示,采用mae方法計算差異值,并設(shè)定閾值進(jìn)行優(yōu)化調(diào)整,確保了模型在幾何結(jié)構(gòu)和表面特征上的高度一致,減少了不一致性和誤差,提高了模型的整體質(zhì)量,通過設(shè)定綜合差異閾值并進(jìn)行多次迭代優(yōu)化,確保模型逐步接近理想狀態(tài),最終達(dá)到高質(zhì)量的標(biāo)準(zhǔn)。
- 還沒有人留言評論。精彩留言會獲得點贊!