基于運動特性補償的拓展目標特征點跟蹤方法
本發明屬于計算機視覺的目標跟蹤領域,具體涉及基于運動特性補償的拓展目標特征點跟蹤方法,可用于解決拓展目標的穩定跟蹤問題。
背景技術:
1、目標檢測與跟蹤作為計算機視覺領域的研究熱點,廣泛應用于智能視頻監控、智能交通系統、智能視覺導航、現代化軍事和人機交互等領域,而圖像目標檢測與跟蹤技術作為視頻應用中的關鍵技術支撐,其性能直接決定著跟蹤應用系統的穩定性。
2、圖像跟蹤應用系統主要包括圖像采集、信息處理、目標檢測和目標跟蹤幾個步驟。其中,目標跟蹤算法基于視頻流跟蹤,應用場景和目標自身中存在的復雜性和不確定性導致目標跟蹤的效果受到一定程度上的影響,例如在場景中光照變化、目標尺度變化、目標抖動的影響和目標被遮擋時的變化,均對目標跟蹤算法的效果產生挑戰性。因此,研究能夠實現目標穩定跟蹤的算法能夠為更高級的任務奠定基礎。
3、針對拓展目標的跟蹤,基于傳統的目標局部特征的跟蹤方法通過提取目標的底層特征,例如直方圖特征,顏色特征和輪廓特征,并以此進行特征匹配判別背景和目標,但是在復雜場景條件下,特征匹配算法的性能將引起匹配場景發生局部或全局變化。而作為更高層信號表示的基礎,點特征具有較強的不變性、穩定性和分辨能力,且較其他特征顯著性高、信息量大,相對穩定、相對更容易提取,因此基于拓展目標特征點的跟蹤方法能夠高速穩定地實現目標的高精度定位跟蹤,對于圖像中亮度、形狀等變化能夠有較好的適用性。傳統的harris角點沒有考慮尺度變化,因此無法在變化的尺度下獲取能夠穩定跟蹤的特征點。基于surf特征點的跟蹤算法相比較于基于sift特征點的跟蹤算法和基于kaze特征點的跟蹤算法有較強的尺度和旋轉抗性,且計算速率強于基于sift特征點的跟蹤算法,在變化亮度魯棒性上強于基于orb特征點的跟蹤算法,因此,基于高精度、高穩定性和不變的surf特征及其描述符進行目標跟蹤能夠在一定程度上提升目標跟蹤的穩定性和魯棒性。但當圖像中存在相似結構和復雜背景的干擾,提取到包含相似的局部特征描述子,造成局部特征匹配存在匹配歧義問題,此時錯誤匹配造成的位置偏差遠大于正確匹配,基于surf特征點的跟蹤算法無法得到精確的目標預測結果,所以需要剔除不符合最優模型的噪聲,降低代價函數。傳統的方法不能擺脫錯誤匹配的干擾,用其估計的模型嚴重偏離真實值,具有低魯棒性。
4、隨機一致性算法作為目前應用于基于特征點匹配的跟蹤方法中的重要技術之一,能明顯地提升某個匹配數量范圍內的匹配精確度,可以通過隨機抽樣一致性算法剔除圖像中的錯誤匹配,計算匹配矩陣。然而當特征點數量較少或者無特征點匹配情況下,基于特征點的目標跟蹤算法則無法發揮其最優性能。
技術實現思路
1、為解決上述技術問題,本發明提供了基于運動特性補償的拓展目標特征點跟蹤方法。所述方法融合基于穩健特征點的匹配優化和基于卡爾曼濾波的跟蹤預測校正算法剔除不符合最優模型的噪聲,無偏、穩定、最優地預測目標的狀態信息,并通過基于長短時融合特征的模板更新算法融合歷史信息和當前目標狀態信息,增強模板特征點的魯棒性,實現較長時序范圍內的目標穩定跟蹤。
2、為實現上述目的,本發明采用的技術方案如下:
3、一種基于運動特性補償的拓展目標特征點跟蹤方法,包括以下步驟:
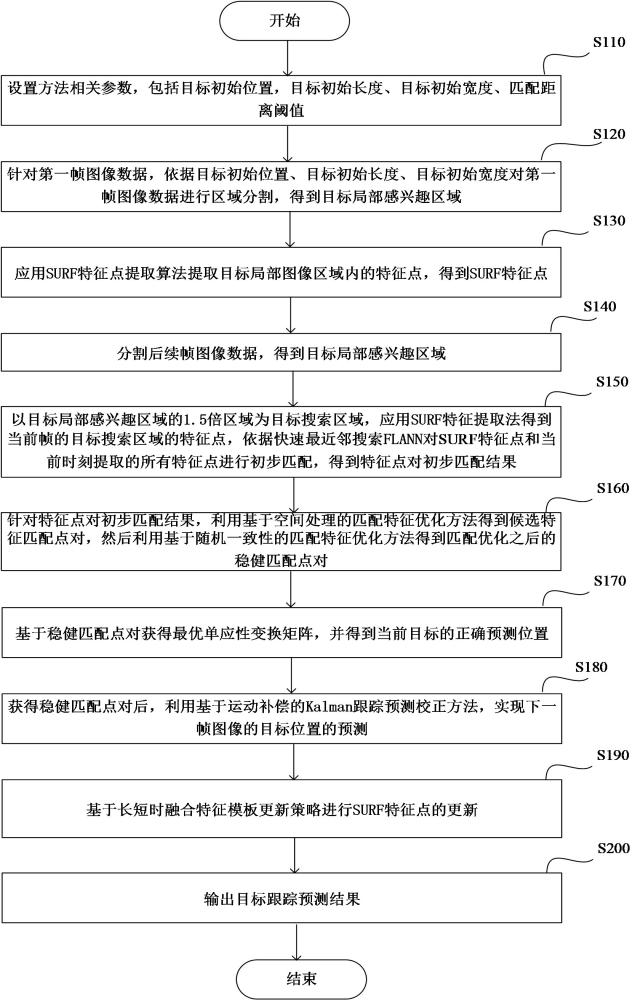
4、步驟s110:設置方法相關參數,包括目標初始位置,目標初始長度、目標初始寬度、匹配距離閾值;
5、步驟s120:針對第一幀圖像數據,依據目標初始位置、目標初始長度、目標初始寬度對第一幀圖像數據進行區域分割,得到目標局部感興趣區域;
6、步驟s130:應用surf特征點提取算法提取目標局部圖像區域內的特征點,得到surf特征點,作為初始surf特征點模板;
7、步驟s140:分割后續幀圖像數據,得到目標局部感興趣區域;
8、步驟s150:以目標局部感興趣區域的1.5倍區域為目標搜索區域,應用surf特征提取法得到當前幀的目標搜索區域的特征點,依據快速最近鄰搜索flann對surf特征點模板和當前時刻提取的所有特征點進行初步匹配,得到特征點對初步匹配結果;
9、步驟s160:針對特征點對初步匹配結果,利用基于空間預處理的匹配特征優化方法得到候選特征匹配點對,然后利用基于隨機一致性選擇的匹配特征優化方法得到匹配優化之后的穩健匹配點對;
10、步驟s170:基于穩健匹配點對獲得最優單應性變換矩陣,并得到當前目標的正確預測位置;
11、步驟s180:獲得穩健匹配點對后,利用基于運動補償的卡爾曼跟蹤預測校正方法,實現下一幀圖像的目標位置的預測;
12、步驟s190:基于長短時融合特征模板更新策略進行surf特征點模板的更新。
13、步驟s200:輸出目標跟蹤預測結果。
14、本發明的有益效果在于:
15、基于卡爾曼濾波的目標跟蹤方法應用最小均方誤差作為準則,通過觀測數據和模型預測數據建立方程進而修正觀測到的目標位置,不僅能夠在一定程度上有效地處理遮擋問題,還可以對模型的不確定性進行更好的補償,為模型提供更加精確和穩定的目標狀態信息。
16、本發明可以解決自相似的局部特征描述子引起的局部特征匹配存在匹配歧義問題,通過對空間預處理篩選和隨機一致性篩選,能夠減少錯誤匹配的數量,獲得可靠的參數估計結果,提高目標匹配的魯棒性,對目標進行準確且穩定的跟蹤。
17、本發明在應用卡爾曼跟蹤預測校正方法進行目標狀態信息預測時,同時考慮目標穩定匹配和非穩定匹配時的觀測狀態,通過匹配狀態信息和軌跡預測信息分析目標運動特性校正異常匹配跟蹤下的目標狀態,增加跟蹤位置與真實位置之間的精確度,增加跟蹤的成功率。
18、本發明通過融合前一模板和上一時刻的動態感興趣區域中目標的重要信息,使動態模板具有更豐富的目標特性,能夠適應更具挑戰性的場景,增強模板特征的魯棒性,有效地避免噪聲的疊加,實現長時序的目標穩定跟蹤。
技術特征:
1.一種基于運動特性補償的拓展目標特征點跟蹤方法,其特征在于,包括如下步驟:
2.根據權利要求1所述的基于運動特性補償的拓展目標特征點跟蹤方法,其特征在于,所述步驟s120包括:
3.根據權利要求1所述的基于運動特性補償的拓展目標特征點跟蹤方法,其特征在于,所述步驟s130包括:
4.根據權利要求3所述的基于運動特性補償的拓展目標特征點跟蹤方法,其特征在于,步驟a包括:通過積分圖技術加快箱式濾波計算速度,利用箱式濾波器的不同模板尺寸方式和不同尺度空間因子構建不同尺度的圖像金字塔,構建hessian矩陣,通過hessian矩陣實現尺度空間的極值檢測,生成目標局部感興趣區域穩定的特征點。
5.根據權利要求1所述的基于運動特性補償的拓展目標特征點跟蹤方法,其特征在于,步驟s140包括:針對后續幀圖像數據,若為第二幀則以目標初始長度和目標初始寬度對第二幀圖像數據進行目標局部感興趣區域分割,否則以目標預測位置為中心位置,目標預測長度和目標預測寬度作為分割區域范圍對圖像數據進行分割,得到目標局部感興趣區域。
6.根據權利要求1所述的基于運動特性補償的拓展目標特征點跟蹤方法,其特征在于,所述步驟s150包括:
7.根據權利要求6所述的基于運動特性補償的拓展目標特征點跟蹤方法,其特征在于,基于k-d樹的最近鄰搜索算法包括:首先構建k-d樹,對surf特征點集和目標搜索區域特征點集,選擇特征描述子中方差最高的維度,利用此維度數值將數據劃分為兩部分,然后建立多棵隨機k-d樹,從具有最高方差的維中隨機選取若干維度,用來劃分數據,在對隨機k-d森林搜索時,所有隨機k-d樹共享一個優先隊列,最后利用構建的索引結構得到最近鄰搜索匹配結果。
8.根據權利要求1所述的基于運動特性補償的拓展目標特征點跟蹤方法,其特征在于,所述步驟s160包括:
9.根據權利要求1所述的基于運動特性補償的拓展目標特征點跟蹤方法,其特征在于,所述步驟s180中基于運動補償的卡爾曼跟蹤預測校正方法使用最小均方誤差作為準則,建立方程修正觀測到的目標位置,包括對下一幀位置的估計值計算和對下一幀圖像的目標位置的預測,其中:
10.根據權利要求1所述的基于運動特性補償的拓展目標特征點跟蹤方法,其特征在于,所述步驟s190包括:基于長短時融合特征模板更新策略同時構建長時記憶模板和短時匹配模板,其中:
技術總結
本發明公開了一種基于運動特性補償的拓展目標特征點跟蹤方法,屬于計算機視覺的目標跟蹤領域,方法包括:首先構建基于穩健特征點的匹配特征優化方法,減少了目標特征點錯誤匹配的數量,實現最優變換模型參數的估計;其次設計了基于卡爾曼濾波約束的跟蹤預測校正方法,對匹配跟蹤模型的不確定性進行更好的補償;最后,設計了長短時融合特征模板更新策略,融合歷史信息和當前目標狀態信息,增強模板特征的魯棒性,有效避免噪聲的疊加,可以實現長時序的目標穩定跟蹤。本發明在特征匹配與預測過程中交互式解譯圖像空間信息與感興趣特征點信息,使得匹配特征的模型更魯棒,預測目標位置誤差更小,長時跟蹤結果更穩定和準確。
技術研發人員:邵濤,劉東旭,康增鵬,賈格,魏宇星
受保護的技術使用者:中國科學院光電技術研究所
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!