周期性參考跟蹤和擾動抑制的電機轉速控制方法及裝置
本發明屬于電機轉速伺服控制領域,尤其涉及一種周期性參考跟蹤和擾動抑制的電機轉速控制方法及裝置。
背景技術:
1、電機驅動系統憑借其功率密度高,轉矩慣量比大,可靠性強等優勢,已被廣泛應用于各種先進工業轉速伺服領域。優秀的動態響應速度和擾動抑制能力被認為是電機驅動系統高性能轉速伺服控制器設計的核心要素。機器人,數控機床等先進工業產品不僅要求電機驅動系統跟蹤轉速常值參考指令和抑制常值擾動,還需要快速跟蹤轉速周期性參考指令和抑制周期性擾動。
2、然而,現有轉速控制方法由于不能同時提升轉速參考跟蹤性能和擾動抑制性能,不能較好的應用于轉速周期性參考指令和周期性擾動工況,造成轉速控制出現明顯波動和滯后。
技術實現思路
1、本發明的目的在于提供一種周期性參考跟蹤和擾動抑制的電機轉速控制方法及裝置,用于解決上述問題。本發明能夠有效地同時跟蹤電機周期性轉速參考指令和抑制周期性擾動,實現高性能轉速控制。
2、本發明按以下技術方案實現:
3、第一方面,本發明提供了一種周期性參考跟蹤和擾動抑制的電機轉速控制方法,所述方法通過構建包含比例迭代學習控制律和比例積分準諧振觀測器的轉速控制器,對電機周期性轉速參考指令進行實時跟蹤,并利用比例積分準諧振觀測器對周期性擾動進行觀測和抑制;所述方法具體步驟包括:
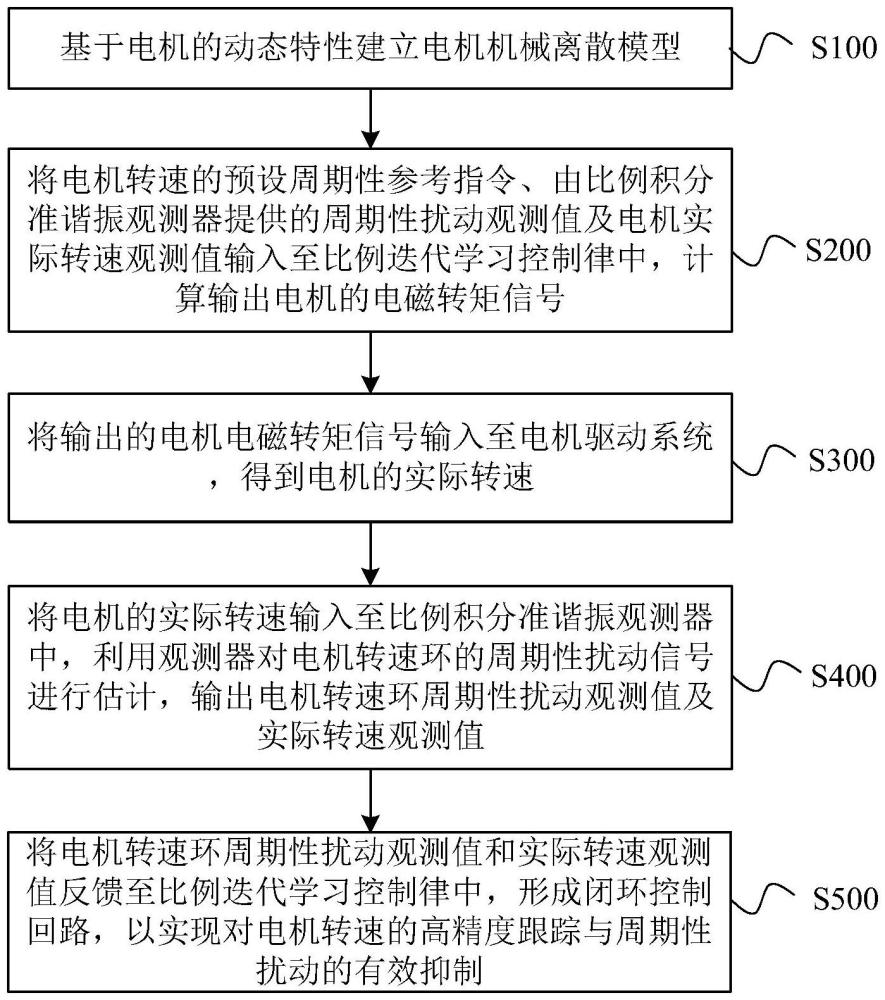
4、基于電機的動態特性建立電機機械離散模型;
5、將電機轉速的預設周期性參考指令、由比例積分準諧振觀測器提供的周期性擾動觀測值及電機實際轉速觀測值輸入至比例迭代學習控制律中,計算輸出電機的電磁轉矩信號;
6、將輸出的電機電磁轉矩信號輸入至電機驅動系統,得到電機的實際轉速;
7、將電機的實際轉速輸入至比例積分準諧振觀測器中,利用觀測器對電機轉速環的周期性擾動信號進行估計,輸出電機轉速環周期性擾動觀測值及實際轉速觀測值;
8、將電機轉速環周期性擾動觀測值和實際轉速觀測值反饋至比例迭代學習控制律中,形成閉環控制回路,以實現對電機轉速的高精度跟蹤與周期性擾動的有效抑制。
9、在一種實施方式中,所述基于電機的動態特性建立電機機械離散模型為:
10、
11、其中,ω(k)為電機在采樣時刻k的實際轉速,p(z)=ts/(z-1),z為離散時間算子,ts為轉速控制周期,jn為電機轉動慣量,tem(k)為電機在采樣時刻k的電磁轉矩,d(k)表示電機在采樣時刻k的周期性擾動。
12、在一種實施方式中,所述比例迭代學習控制律的表達式為:
13、
14、其中,jn為電機轉動慣量,為轉速控制誤差;和分別為電機在采樣時刻k的周期性參考轉速和轉速觀測值;i為第i個迭代周期;m表示一個迭代周期中第m個控制周期;kp為控制律的比例系數;為采樣時刻k的擾動觀測值;vi,m為控制律中迭代學習控制部分的輸出。
15、在一種實施方式中,所述控制律中迭代學習控制部分的輸出vi,m的表達式為:
16、vi,m(k)=h(z)[vi-1,m(k)+ρl(z)ei-1,m(k)]
17、其中,h(z)為濾波函數;l(z)為學習函數;ρ>0為學習增益,vi-1,m(k)和ei-1,m(k)分別代表采樣時刻k的第i-1個迭代周期的控制律中迭代學習控制部分的輸出和轉速控制誤差。
18、在一種實施方式中,所述轉速控制器的比例積分準諧振觀測器的表達式為:
19、
20、其中,為采樣時刻k的擾動觀測值,為電機在采樣時刻k的周期性轉速觀測值,tem(k)為電機在采樣時刻k的電磁轉矩,表示在采樣時刻k的擾動積分部分,ω(k)為電機在采樣時刻k的實際轉子轉速,h為觀測器參數,grn(z)為離散準諧振控制器。
21、在一種實施方式中,所述離散準諧振控制器grn(z)的表達式為:
22、
23、其中,參數b0n=(c0n-c1n)/c2n,b1n=-2c1n/c2n,b2n=-(c0n+c1n)/c2n,a1n=(2c2n-16)/c2n,參數c2n=4+(nωr)2ts2,n為正整數,ωr為基波頻率,krn和分別為n次諧振項的比例系數和相位調整角。
24、第二方面,本發明提供了一種周期性參考跟蹤和擾動抑制的電機轉速控制裝置,所述裝置包括:電機機械離散模型模塊、比例迭代學習控制律模塊、比例積分準諧振觀測器及反饋控制模塊;其中,
25、所述電機機械離散模型模塊,用于基于電機的動態特性建立電機機械離散模型;
26、所述比例迭代學習控制律模塊,用于接收電機轉速預設給定周期性參考指令、轉速環周期性擾動觀測值、實際轉速觀測值,基于比例迭代學習控制律計算輸出電機的電磁轉矩信號;并將輸出的電機電磁轉矩信號輸入至電機驅動系統,得到電機的實際轉速;
27、所述比例積分準諧振觀測器,用于接收電機的實際轉速信號,估計電機轉速環的周期性擾動信號,輸出電機轉速環周期性擾動觀測值及實際轉速觀測值;
28、所述反饋控制模塊,用于將電機轉速環周期性擾動觀測值和實際轉速觀測值反饋至比例迭代學習控制律模塊,形成閉環控制回路,以實現電機轉速的高精度跟蹤與周期性擾動的抑制。
29、第三方面,一種電機轉速控制系統,所述系統包括:上述的周期性參考跟蹤和擾動抑制的電機轉速控制裝置。
30、第四方面,一種計算機程序產品,包括計算機程序/指令,所述計算機程序/指令被處理器執行時實現如上述的周期性參考跟蹤和擾動抑制的電機轉速控制方法。
31、第五方面,本發明提供了一種電子設備,其特征在于:包括處理器和存儲器;其中,所述處理器執行所述存儲器中保存的計算機程序時實現上述的周期性參考跟蹤和擾動抑制的電機轉速控制方法。
32、與現有技術相比,本發明具有以下優點:
33、本發明通過設計比例迭代學習控制律和比例積分準諧振觀測器,所得轉速控制器能夠有效地同時跟蹤電機周期性轉速參考指令和抑制周期性擾動,實現高性能的轉速控制。
技術特征:
1.一種周期性參考跟蹤和擾動抑制的電機轉速控制方法,其特征在于,所述方法通過構建包含比例迭代學習控制律和比例積分準諧振觀測器的轉速控制器,對電機周期性轉速參考指令進行實時跟蹤,并利用比例積分準諧振觀測器對周期性擾動進行觀測和抑制;所述方法具體步驟包括:
2.根據權利要求1所述的周期性參考跟蹤和擾動抑制的電機轉速控制方法,其特征在于,所述基于電機的動態特性建立電機機械離散模型為:
3.根據權利要求1所述的周期性參考跟蹤和擾動抑制的電機轉速控制方法,其特征在于,所述比例迭代學習控制律的表達式為:
4.根據權利要求3所述的周期性參考跟蹤和擾動抑制的電機轉速控制方法,其特征在于,所述控制律中迭代學習控制部分的輸出vi,m的表達式為:
5.根據權利要求2所述的周期性參考跟蹤和擾動抑制的電機轉速控制方法,其特征在于,所述比例積分準諧振觀測器的表達式為:
6.根據權利要求5所述的周期性參考跟蹤和擾動抑制的電機轉速控制方法,其特征在于,所述離散準諧振控制器grn(z)的表達式為:
7.一種周期性參考跟蹤和擾動抑制的電機轉速控制裝置,其特征在于,所述裝置包括:電機機械離散模型模塊、比例迭代學習控制律模塊、比例積分準諧振觀測器及反饋控制模塊;其中,
8.一種電機轉速控制系統,其特征在于,所述系統包括:權利要求7所述的周期性參考跟蹤和擾動抑制的電機轉速控制裝置。
9.一種計算機程序產品,包括計算機程序/指令,其特征在于:所述計算機程序/指令被處理器執行時實現如權利要求1至6任一項所述的周期性參考跟蹤和擾動抑制的電機轉速控制方法。
10.一種電子設備,其特征在于:包括處理器和存儲器;其中,所述處理器執行所述存儲器中保存的計算機程序時實現如權利要求1至6任一項所述的周期性參考跟蹤和擾動抑制的電機轉速控制方法。
技術總結
本發明公開了一種周期性參考跟蹤和擾動抑制的電機轉速控制方法及裝置,該方法包括:基于電機的動態特性建立電機機械離散模型;將電機轉速的預設周期性參考指令、周期性擾動觀測值及電機實際轉速觀測值輸入至比例迭代學習控制律中,計算輸出電機的電磁轉矩信號;將輸出的電機電磁轉矩信號輸入至電機驅動系統,得到電機的實際轉速;將電機的實際轉速輸入至比例積分準諧振觀測器中,輸出電機轉速環周期性擾動觀測值及實際轉速觀測值;將電機轉速環周期性擾動觀測值和實際轉速觀測值反饋至比例迭代學習控制律中,形成閉環控制回路。本發明能夠有效地同時跟蹤電機周期性轉速參考指令和抑制周期性擾動,實現高性能轉速控制。
技術研發人員:林詩雨,趙夢圓,于東升,韓國強,湯昊岳
受保護的技術使用者:中國礦業大學
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!