無感方波控制的反電動(dòng)勢(shì)采樣機(jī)制及控制系統(tǒng)的制作方法
本發(fā)明涉及電機(jī)控制,尤其涉及一種無感方波控制的反電動(dòng)勢(shì)采樣機(jī)制及控制系統(tǒng)。
背景技術(shù):
1、在直流無刷電機(jī)(brushless?direct?current?motor?,bldc)的無感方波控制中,電機(jī)的反電動(dòng)勢(shì)通常被采集作為過零點(diǎn)換相算法的關(guān)鍵輸入,零點(diǎn)換相算法為bldc控制中的一種控制算法,通過檢測(cè)bldc電機(jī)三相的端電壓,通過端電壓大小判斷過零點(diǎn),來確定轉(zhuǎn)子位置,從而根據(jù)轉(zhuǎn)子位置控制電流可以實(shí)現(xiàn)無刷電機(jī)的轉(zhuǎn)動(dòng)速度的調(diào)整,檢測(cè)bldc的三相端電壓,然后進(jìn)行反電動(dòng)勢(shì)過零點(diǎn)判斷,也就是每次過零點(diǎn)檢測(cè)需要采集三相端的3個(gè)模擬數(shù)據(jù),采樣消耗的時(shí)間較長。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明旨在至少在一定程度上解決相關(guān)技術(shù)中的技術(shù)問題之一。為此,本發(fā)明的一個(gè)目的在于提出一種無感方波控制的反電動(dòng)勢(shì)采樣機(jī)制及控制系統(tǒng),以實(shí)現(xiàn)縮短采樣消耗時(shí)間。
2、根據(jù)本發(fā)明實(shí)施例的第一方面,提供了一種無感方波控制的反電動(dòng)勢(shì)采樣機(jī)制,所述采樣機(jī)制包括:
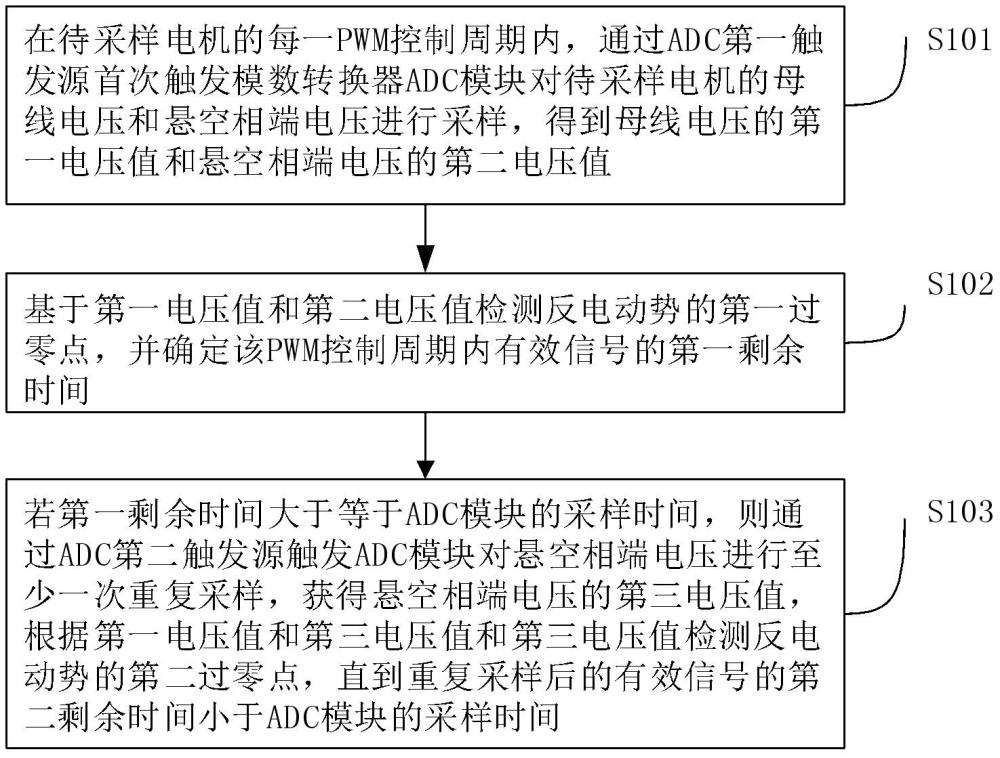
3、在待采樣電機(jī)的每一pwm(pulse-width?modulation,脈沖寬度調(diào)制技術(shù))控制周期內(nèi),通過adc第一觸發(fā)源首次觸發(fā)模數(shù)轉(zhuǎn)換器adc模塊(analog-to-digital?converter,模數(shù)轉(zhuǎn)換器)對(duì)所述待采樣電機(jī)的母線電壓和懸空相端電壓進(jìn)行采樣,得到母線電壓的第一電壓值和懸空相端電壓的第二電壓值;
4、基于所述第一電壓值和所述第二電壓值檢測(cè)反電動(dòng)勢(shì)的第一過零點(diǎn),并確定該pwm控制周期內(nèi)有效信號(hào)的第一剩余時(shí)間;
5、若第一剩余時(shí)間大于等于adc模塊的采樣時(shí)間,則通過adc第二觸發(fā)源觸發(fā)adc模塊對(duì)懸空相端電壓進(jìn)行至少一次重復(fù)采樣,獲得懸空相端電壓的第三電壓值,根據(jù)第一電壓值和第三電壓值和第三電壓值檢測(cè)反電動(dòng)勢(shì)的第二過零點(diǎn),直到重復(fù)采樣后的有效信號(hào)的第二剩余時(shí)間小于adc模塊的采樣時(shí)間。
6、可選的,所述adc模塊配置有多通道綜合觸發(fā)機(jī)制,所述多通道綜合觸發(fā)機(jī)制包括至少兩個(gè)觸發(fā)源,其中包括所述adc第一觸發(fā)源和所述adc第二觸發(fā)源,所述第一觸發(fā)源為pwm定時(shí)模塊的更新事件觸發(fā)源;所述第二觸發(fā)源為軟件觸發(fā)源。
7、可選的,所述多通道綜合觸發(fā)機(jī)制中,任一觸發(fā)源被配置為使能所述adc模塊的一個(gè)或者多個(gè)采樣通道。
8、可選的,所述觸發(fā)模數(shù)轉(zhuǎn)換器adc模塊對(duì)所述待采樣電機(jī)的母線電壓和懸空相端電壓進(jìn)行采樣,包括:
9、在所述adc第一觸發(fā)源被配置為使能多個(gè)目標(biāo)采樣通道的情況下,觸發(fā)所述adc模塊依次對(duì)所述目標(biāo)采樣通道進(jìn)行采樣,所述目標(biāo)采樣通道包括母線電壓和懸空相端電壓對(duì)應(yīng)的采樣通道。
10、可選的,所述adc第一觸發(fā)源包括以下至少一項(xiàng):
11、定時(shí)器、事件輸出模塊。
12、可選的,所述adc第二觸發(fā)源被配置為具有以下觸發(fā)條件:
13、當(dāng)預(yù)設(shè)的控制器程序運(yùn)行至程序目標(biāo)位置時(shí)觸發(fā)。
14、可選的,所述基于所述第一電壓值和所述第二電壓值檢測(cè)反電動(dòng)勢(shì)的第一過零點(diǎn),包括:
15、若所述第二電壓值為所述第一電壓值的一半,則采集所述第二電壓值的時(shí)間點(diǎn)為第一過零點(diǎn)。
16、根據(jù)本發(fā)明實(shí)施例的第二方面,提供了一種無感方波控制的反電動(dòng)勢(shì)采樣控制系統(tǒng),所述控制系統(tǒng)包括:三相半橋驅(qū)動(dòng)電路、微控制單元mcu;
17、所述mcu,用于存儲(chǔ)計(jì)算機(jī)程序,所述計(jì)算機(jī)程序被配置為上述任一項(xiàng)所述的無感方波控制的反電動(dòng)勢(shì)采樣機(jī)制,確定反電動(dòng)勢(shì)的過零點(diǎn);
18、所述三相半橋驅(qū)動(dòng)電路,用于基于所確定的過零點(diǎn)控制待采樣電機(jī)的換相操作。
19、本發(fā)明實(shí)施例提供的方案中,這樣,按照本發(fā)明實(shí)施例提供的方案,每一pwm控制周期內(nèi)就只需要采集母線電壓和懸空相端電壓,所得電壓值就可以進(jìn)行過零點(diǎn)檢測(cè),不需要采集全部的三相端電壓,每次檢測(cè)最多只需要采集兩個(gè)數(shù)據(jù),而且母線電壓的第一電壓值只需要采集一次,減少了所需的adc模塊的采樣通道個(gè)數(shù),縮短了采樣消耗的時(shí)間,也就能夠更快地檢測(cè)到過零點(diǎn),從而提高后續(xù)電機(jī)控制的效率和無感方波算法的換向檢測(cè)精度。
20、并且,通過adc第一觸發(fā)源和adc第二觸發(fā)源的結(jié)合使用,能夠在adc的采樣時(shí)間允許的情況下,在一個(gè)pwm控制周期內(nèi)盡量多次地嘗試檢測(cè)過零點(diǎn),也能夠提高檢測(cè)精度。
21、本發(fā)明附加的方面和優(yōu)點(diǎn)將在下面的描述中部分給出,部分將從下面的描述中變得明顯,或通過本發(fā)明的實(shí)踐了解到。
技術(shù)特征:
1.一種無感方波控制的反電動(dòng)勢(shì)采樣機(jī)制,其特征在于,所述采樣機(jī)制包括:
2.根據(jù)權(quán)利要求1所述的無感方波控制的反電動(dòng)勢(shì)采樣機(jī)制,其特征在于,所述adc模塊配置有多通道綜合觸發(fā)機(jī)制,所述多通道綜合觸發(fā)機(jī)制包括至少兩個(gè)觸發(fā)源,其中包括所述adc第一觸發(fā)源和所述adc第二觸發(fā)源,所述第一觸發(fā)源為pwm定時(shí)模塊的更新事件觸發(fā)源;所述第二觸發(fā)源為軟件觸發(fā)源。
3.根據(jù)權(quán)利要求2所述的無感方波控制的反電動(dòng)勢(shì)采樣機(jī)制,其特征在于,所述多通道綜合觸發(fā)機(jī)制中,任一觸發(fā)源被配置為使能所述adc模塊的一個(gè)或者多個(gè)采樣通道。
4.根據(jù)權(quán)利要求3所述的無感方波控制的反電動(dòng)勢(shì)采樣機(jī)制,其特征在于,所述觸發(fā)模數(shù)轉(zhuǎn)換器adc模塊對(duì)所述待采樣電機(jī)的母線電壓和懸空相端電壓進(jìn)行采樣,包括:
5.根據(jù)權(quán)利要求1所述的無感方波控制的反電動(dòng)勢(shì)采樣機(jī)制,其特征在于,所述adc第一觸發(fā)源包括以下至少一項(xiàng):
6.根據(jù)權(quán)利要求1所述的無感方波控制的反電動(dòng)勢(shì)采樣機(jī)制,其特征在于,所述adc第二觸發(fā)源被配置為具有以下觸發(fā)條件:
7.根據(jù)權(quán)利要求1所述的無感方波控制的反電動(dòng)勢(shì)采樣機(jī)制,其特征在于,所述基于所述第一電壓值和所述第二電壓值檢測(cè)反電動(dòng)勢(shì)的第一過零點(diǎn),包括:
8.一種無感方波控制的反電動(dòng)勢(shì)采樣控制系統(tǒng),其特征在于,所述控制系統(tǒng)包括:三相半橋驅(qū)動(dòng)電路、微控制單元mcu;
技術(shù)總結(jié)
本發(fā)明公開了一種無感方波控制的反電動(dòng)勢(shì)采樣機(jī)制及控制系統(tǒng),其中包含了一種多通道綜合觸發(fā)機(jī)制的ADC模塊,涉及電機(jī)控制技術(shù)領(lǐng)域,所述方法包括:每一PWM控制周期內(nèi),通過ADC第一觸發(fā)源首次觸發(fā)模數(shù)轉(zhuǎn)換器ADC模塊對(duì)待采樣電機(jī)的母線電壓和懸空相端電壓進(jìn)行采樣,得到母線電壓的第一電壓值和懸空相端電壓的第二電壓值,檢測(cè)反電動(dòng)勢(shì)的第一過零點(diǎn)若第一剩余時(shí)間大于等于ADC模塊的采樣時(shí)間,則通過ADC第二觸發(fā)源觸發(fā)ADC模塊對(duì)懸空相端電壓進(jìn)行至少一次重復(fù)采樣,檢測(cè)反電動(dòng)勢(shì)的第二過零點(diǎn),直到重復(fù)采樣后的有效信號(hào)的第二剩余時(shí)間小于ADC模塊的采樣時(shí)間。本發(fā)明縮短了采樣消耗時(shí)間,提高了反電動(dòng)勢(shì)過零點(diǎn)檢測(cè)的精度。
技術(shù)研發(fā)人員:仲杰,孫維國
受保護(hù)的技術(shù)使用者:合肥智芯半導(dǎo)體有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!