一種能夠智能語(yǔ)音控制和播報(bào)的衛(wèi)星便攜站的制作方法
本發(fā)明涉及語(yǔ)音控制,具體是涉及一種能夠智能語(yǔ)音控制和播報(bào)的衛(wèi)星便攜站。
背景技術(shù):
1、傳統(tǒng)的衛(wèi)星便攜站在設(shè)計(jì)和操作上主要依賴于手動(dòng)控制,這種操作方式在一定程度上增加了使用的復(fù)雜性,并可能導(dǎo)致操作失誤和效率低下,特別是在野外作業(yè)、應(yīng)急通信或軍事行動(dòng)等場(chǎng)景中,操作人員往往需要在復(fù)雜、惡劣的環(huán)境中快速完成天線的調(diào)整和控制,然而,手動(dòng)操作不僅耗時(shí)費(fèi)力,還容易受到操作人員的經(jīng)驗(yàn)和技術(shù)水平的限制,從而影響通信的及時(shí)性和穩(wěn)定性。
2、此外,現(xiàn)有的語(yǔ)音控制系統(tǒng)在復(fù)雜噪聲環(huán)境下的表現(xiàn)仍然存在較大的局限性,盡管語(yǔ)音識(shí)別技術(shù)近年來(lái)取得了一定的進(jìn)步,但在實(shí)際應(yīng)用中,尤其是在戶外或嘈雜環(huán)境中,語(yǔ)音識(shí)別的準(zhǔn)確率和響應(yīng)速度仍難以滿足實(shí)時(shí)控制的需求,與此同時(shí),傳統(tǒng)衛(wèi)星便攜站通常缺乏智能化的播報(bào)功能,操作人員需要通過(guò)顯示屏、指示燈或其他視覺(jué)反饋裝置來(lái)了解設(shè)備的工作狀態(tài),這種方式在某些場(chǎng)景下顯得不夠直觀和便捷,尤其是在光線不足或操作人員無(wú)法直接觀察設(shè)備的情況下。例如,在夜間或緊急情況下,操作人員可能無(wú)法快速獲取設(shè)備的狀態(tài)信息,從而影響操作的效率和安全性。
技術(shù)實(shí)現(xiàn)思路
1、為解決上述技術(shù)問(wèn)題,提供一種能夠智能語(yǔ)音控制和播報(bào)的衛(wèi)星便攜站,本技術(shù)方案解決了上述的問(wèn)題。
2、為達(dá)到以上目的,本發(fā)明采用的技術(shù)方案為:
3、一種能夠智能語(yǔ)音控制和播報(bào)的衛(wèi)星便攜站,包括:
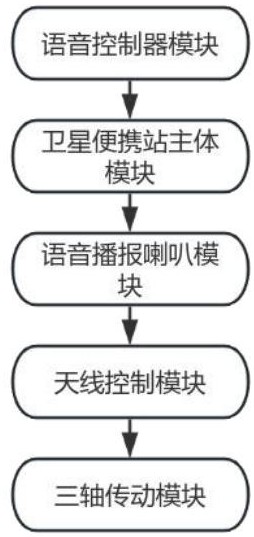
4、語(yǔ)音控制器模塊:用于操作人員語(yǔ)音拾取、語(yǔ)音轉(zhuǎn)換,并與天線控制單元acu功能對(duì)接;
5、衛(wèi)星便攜站主體模塊:衛(wèi)星便攜站主體模塊與語(yǔ)音控制器模塊電性連接,所述衛(wèi)星便攜站主體模塊用于將獲取的操作者語(yǔ)音轉(zhuǎn)換為相對(duì)應(yīng)的控制指令,并通過(guò)天線的acu將控制指令推送給方位、俯仰、極化三軸傳動(dòng)機(jī)構(gòu);
6、語(yǔ)音播報(bào)喇叭模塊:語(yǔ)音播報(bào)喇叭模塊與衛(wèi)星便攜站主體模塊電性連接,所
7、述語(yǔ)音播報(bào)喇叭模塊用于播報(bào)衛(wèi)星便攜站當(dāng)前所處工作狀態(tài);
8、天線控制模塊:天線控制模塊與語(yǔ)音播報(bào)喇叭模塊典型連接,所述天線控制模塊用于接收語(yǔ)音控制器提供的控制指令,并通過(guò)三軸傳動(dòng)機(jī)構(gòu)實(shí)現(xiàn)天線控制;
9、三軸傳動(dòng)模塊:三軸傳動(dòng)模塊與天線控制模塊電性連接,所述三軸傳動(dòng)模塊用于根據(jù)控制指令執(zhí)行方位、俯仰和極化調(diào)節(jié)。
10、優(yōu)選的,所述語(yǔ)音控制器模塊具體包括:
11、語(yǔ)音拾取單元:用于360度全方位拾音;
12、語(yǔ)音處理單元:用于語(yǔ)音識(shí)別、聲紋識(shí)別、語(yǔ)音增強(qiáng)、語(yǔ)音檢測(cè)、智能降噪;
13、模型訓(xùn)練單元:用于訓(xùn)練并寫(xiě)入開(kāi)始尋星、尋星狀態(tài)匯報(bào)、入網(wǎng)狀態(tài)匯報(bào)、天線agc值匯報(bào)、天線收放以及天線關(guān)機(jī)的指令模型;
14、控制指令轉(zhuǎn)換單元,用于將操作者語(yǔ)音轉(zhuǎn)換為相對(duì)應(yīng)的控制指令。
15、優(yōu)選的,所述語(yǔ)音處理單元具體包括:
16、將輸入的語(yǔ)音信號(hào)轉(zhuǎn)化為對(duì)應(yīng)的文本與命令,通過(guò)麥克風(fēng)獲取語(yǔ)音信號(hào),對(duì)語(yǔ)音信號(hào)進(jìn)行預(yù)處理,去除背景噪聲、均衡信號(hào)以及去混響;
17、基于短時(shí)傅里葉變換算法將語(yǔ)音信號(hào)從時(shí)域轉(zhuǎn)換到頻域,使用梅爾頻率倒譜系數(shù)提取與人類聽(tīng)覺(jué)感知相關(guān)的特征;
18、檢測(cè)語(yǔ)音信號(hào)中的有效語(yǔ)音段,去除靜默或非語(yǔ)音部分;
19、使用卷積神經(jīng)網(wǎng)絡(luò)模型對(duì)特征進(jìn)行建模,將特征映射到對(duì)應(yīng)的音素或單詞,結(jié)合語(yǔ)言模型對(duì)聲學(xué)模型的輸出進(jìn)行優(yōu)化,生成最終的文本結(jié)果;
20、提取與說(shuō)話人身份相關(guān)的特征,包括共振峰頻率、聲道特性以及發(fā)聲方式,使用深度學(xué)習(xí)模型構(gòu)建說(shuō)話人的聲紋模板,訓(xùn)練模型以區(qū)分不同說(shuō)話人的特征;
21、將待識(shí)別語(yǔ)音的特征與預(yù)先存儲(chǔ)的聲紋模板進(jìn)行比對(duì),計(jì)算相似度得分,判斷是否為同一說(shuō)話人;
22、通過(guò)分析靜默段估計(jì)噪聲特性,進(jìn)行信號(hào)處理,包括頻域處理以及時(shí)域處理;使用神經(jīng)網(wǎng)絡(luò)模型直接從噪聲信號(hào)中恢復(fù)干凈語(yǔ)音;
23、使用機(jī)器學(xué)習(xí)模型對(duì)每段信號(hào)進(jìn)行分類,判斷信號(hào)是否為語(yǔ)音段,并輸出檢測(cè)結(jié)果;
24、實(shí)時(shí)檢測(cè)環(huán)境噪聲的類型和強(qiáng)度,使用自適應(yīng)濾波器或深度學(xué)習(xí)模型動(dòng)態(tài)跟蹤噪聲特性,使用神經(jīng)網(wǎng)絡(luò)直接從噪聲信號(hào)中分離出干凈語(yǔ)音,對(duì)降噪后的信號(hào)進(jìn)行平滑處理,根據(jù)實(shí)際場(chǎng)景調(diào)整降噪?yún)?shù)。
25、優(yōu)選的,所述基于短時(shí)傅里葉變換算法將語(yǔ)音信號(hào)從時(shí)域轉(zhuǎn)換到頻域,使用梅爾頻率倒譜系數(shù)提取與人類聽(tīng)覺(jué)感知相關(guān)的特征具體包括:
26、其中,短時(shí)傅里葉變換算法公式為:
27、;
28、式中,表示在第個(gè)幀和第個(gè)頻率分量上的復(fù)數(shù)頻譜值,為頻率索引,為時(shí)間索引,表示原始信號(hào),為當(dāng)前幀內(nèi)的樣本索引,為加窗函數(shù),為復(fù)指數(shù)項(xiàng)。
29、優(yōu)選的,所述通過(guò)分析靜默段估計(jì)噪聲特性,進(jìn)行信號(hào)處理,包括頻域處理以及時(shí)域處理;使用神經(jīng)網(wǎng)絡(luò)模型直接從噪聲信號(hào)中恢復(fù)干凈語(yǔ)音具體包括:
30、在語(yǔ)音信號(hào)中,靜默段是指沒(méi)有語(yǔ)音內(nèi)容的部分,通過(guò)能量檢測(cè)、過(guò)零率檢測(cè)或基于機(jī)器學(xué)習(xí)的方法識(shí)別靜默段;
31、通過(guò)分析靜默段的頻譜特性,估計(jì)噪聲的功率譜密度,得到噪聲的頻譜特性;
32、收集干凈語(yǔ)音信號(hào)和對(duì)應(yīng)的噪聲信號(hào),通過(guò)添加不同類型的噪聲模擬真實(shí)場(chǎng)景;
33、基于卷積神經(jīng)網(wǎng)絡(luò)提取頻域或時(shí)域特征,基于損失函數(shù)定義模型優(yōu)化的目標(biāo),使用adam優(yōu)化算法更新模型參數(shù)。
34、優(yōu)選的,所述實(shí)時(shí)檢測(cè)環(huán)境噪聲的類型和強(qiáng)度,使用自適應(yīng)濾波器或深度學(xué)習(xí)模型動(dòng)態(tài)跟蹤噪聲特性,使用神經(jīng)網(wǎng)絡(luò)直接從噪聲信號(hào)中分離出干凈語(yǔ)音,對(duì)降噪后的信號(hào)進(jìn)行平滑處理,根據(jù)實(shí)際場(chǎng)景調(diào)整降噪?yún)?shù)具體包括:
35、檢測(cè)降噪過(guò)程中引入的失真與偽影,使用軟閾值處理,進(jìn)一步優(yōu)化信號(hào)質(zhì)量,根據(jù)信號(hào)特性動(dòng)態(tài)調(diào)整平滑程度;
36、通過(guò)加速度計(jì)感知當(dāng)前環(huán)境,利用設(shè)備的位置與時(shí)間的上下文信息判斷當(dāng)前場(chǎng)景;
37、根據(jù)噪聲類型動(dòng)態(tài)調(diào)整濾波器參數(shù)。
38、優(yōu)選的,所述語(yǔ)音播報(bào)喇叭模塊具體包括:
39、工作狀態(tài)播報(bào)單元,用于播報(bào)衛(wèi)星便攜站當(dāng)前所處工作狀態(tài);
40、音量調(diào)節(jié)單元,用于根據(jù)環(huán)境噪聲自動(dòng)調(diào)節(jié)播報(bào)音量;
41、多語(yǔ)言支持單元,用于支持漢語(yǔ)、英語(yǔ)以及日語(yǔ)的語(yǔ)言播報(bào)。
42、優(yōu)選的,衛(wèi)星便攜站采用asrpro芯片為核心,支持離線語(yǔ)音識(shí)別,不依賴網(wǎng)絡(luò),時(shí)延小于0.1秒,識(shí)別率可達(dá)98%以上,支持10米超遠(yuǎn)距離識(shí)別;
43、asrpro芯片使用dnn、tdnn與rnn的神經(jīng)網(wǎng)絡(luò)及卷積運(yùn)算,執(zhí)行語(yǔ)音識(shí)別任務(wù),其中,運(yùn)算公式為:
44、;
45、式中,為輸入特征向量,為權(quán)重矩陣,為偏置向量,為激活函數(shù),為隱藏層狀態(tài),為當(dāng)前輸入特征,和分別為輸入到隱藏層和隱藏層到隱藏層的權(quán)重矩陣,為激活函數(shù)。
46、優(yōu)選的,所述天線控制模塊具體包括:
47、指令接收單元,用于接收語(yǔ)音控制器發(fā)送的控制指令;
48、指令解析單元,用于解析控制指令并生成對(duì)應(yīng)的執(zhí)行信號(hào);
49、傳動(dòng)控制單元,用于將執(zhí)行信號(hào)推送給方位、俯仰、極化三軸傳動(dòng)機(jī)構(gòu),實(shí)現(xiàn)控制指令向執(zhí)行動(dòng)作的轉(zhuǎn)換。
50、優(yōu)選的,所述衛(wèi)星便攜站的操作人員唯一需要手動(dòng)操作的是一鍵開(kāi)機(jī),其余功能均可通過(guò)語(yǔ)音指令實(shí)現(xiàn),所述衛(wèi)星便攜站在開(kāi)始執(zhí)行動(dòng)作、執(zhí)行動(dòng)作結(jié)束時(shí)均會(huì)觸發(fā)語(yǔ)音播報(bào)功能,提示當(dāng)前便攜站的工作狀態(tài),包括但不限于開(kāi)始尋星、尋星成功、入網(wǎng)成功、天線agc值正常、天線收放完成以及天線關(guān)機(jī)完成狀態(tài)信息。
51、與現(xiàn)有技術(shù)相比,本發(fā)明的有益效果在于:
52、本發(fā)明提出通過(guò)集成智能語(yǔ)音控制、高效的噪聲處理、實(shí)時(shí)狀態(tài)播報(bào)以及多語(yǔ)言支持等功能,顯著提升了衛(wèi)星便攜站的操作便捷性、智能化水平和適應(yīng)性,為用戶提供了更加高效、可靠和友好的使用體驗(yàn)。
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!