一種主動仿形調節支撐式水田精準平地機和平地方法
本發明涉及水田平整機具,具體涉及一種主動仿形調節支撐式水田精準平地機,還涉及一種主動仿形調節支撐式水田精準平地方法。
背景技術:
1、水稻生產灌溉方式以漫灌和淹灌為主,不平整農田會導致水資源利用率低。通過改善農田平整度不僅可以節約水稻生產用水,提高灌溉效率與灌水均勻度,還可以提高土地利用率、稻種發芽率、雜草防治效率、作物成熟均勻度和作物產量,以及減少肥藥施用量。綜上所述,水田平整是水稻生產必不可少的環節。由于旱地的平整機械易受土質、土壤含水率與降雨季節應用限制,因此,水田平整機械更有利于在多季稻地區爭搶農時。
2、根據配套動力差異,水田平地機分為插秧機式和拖拉機式。目前,諸多國家已開展農田改造措施,單塊農田面積呈增大趨勢,這促使以拖拉機為配套動力的平整機械成為主流。然而,現有水田平地鏟水平調節以中位旋轉為主,使平地鏟形變應力集中于旋轉點,限制了大型幅寬水田平地鏟的發展。同時,在坑洼不一的復雜硬底層環境下,現有水田平地機高速作業時,易出現平地鏟高度和水平信息感知與控制遲滯的現象,顯著影響平整作業質量和效率。
3、對于現有技術存在適應性弱,作業效率低、質量差的問題。因此,本發明一種主動仿形調節支撐式水田精準平地機,優化平地鏟高度和水平調節結構與平整控制策略,提高作業效率和質量,以適應復雜硬底層作業環境。
技術實現思路
1、針對現有技術中存在的技術問題,本發明的目的是:提供一種主動仿形調節支撐式水田精準平地和平地方法,優化平整控制策略。
2、為了達到上述目的,本發明采用如下技術方案:
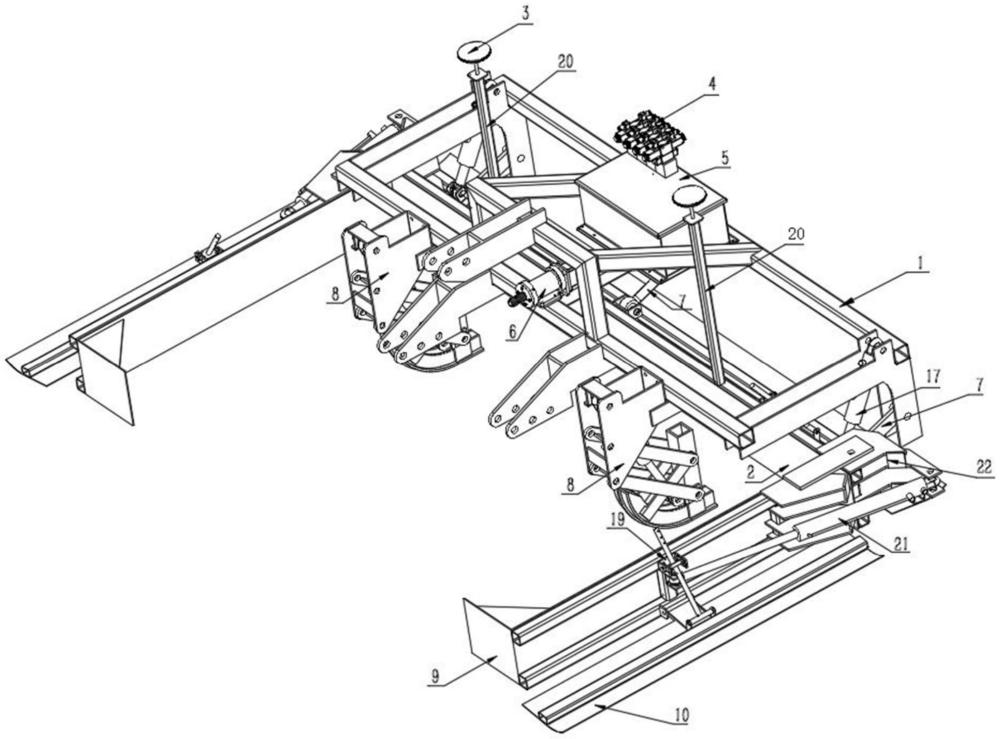
3、一種主動仿形調節支撐式水田精準平地機,包括機架、主動仿形調節支撐機構、平地機構、平地鏟高度與水平聯調機構、控制系統;機架通過三點懸掛裝置與拖拉機連接;主動仿形調節支撐機構安裝在機架上,平地機構通過平地鏟高度與水平聯調機構與機架連接;主動仿形調節支撐機構的數量為兩組以上,沿著橫向方向并排排列,并由控制系統單獨控制;主動仿形調節支撐機構包括掛接架、平行四連桿、支撐腳架、伸縮驅動機構、力傳感器,掛接架安裝在機架前方,作用于硬底層的支撐腳架通過平行四連桿相對于掛接架豎直升降,伸縮驅動機構安裝在掛接架和平行四連桿之間驅動支撐腳架升降,力傳感器實時測量主動仿形調節支撐機構將平地機支撐于水田硬底層的負載力;控制系統根據負載力變化控制伸縮驅動機構伸縮,減少平地機水平和高程因地形而波動,從而減少平地機構的平地鏟傾角和高程變化幅度與頻次。
4、作為一種優選,在硬底層變高時,負載力變大,控制系統通過控制伸縮驅動機構調節主動仿形調節支撐機構的支撐高度,從而減少平地機高度因地形變高而升高;在硬底層變低時,負載力變小,控制系統通過控制伸縮驅動機構調節主動仿形調節支撐機構的支撐高度,從而減少平地機高度因地形變低而降低。
5、作為一種優選,主動仿形調節支撐機構隨硬底層主動仿形,合理化整機受力,減少平地機水平和高程變化,平地鏟高度與水平聯調機構進一步精準調節平地鏟的高程與水平,使平地鏟回歸基準平面。
6、作為一種優選,平地鏟高度與水平聯調機構包括球鉸、拉桿和調節油缸;拉桿的數量為三根,一根上拉桿和兩根下拉桿呈等腰三角形布置,上拉桿位于平地機左右居中位置;拉桿的前端通過球鉸與平地鏟相接,拉桿的后端與機架轉動式連接;調節油缸的數量為兩個,一個調節油缸連接在一個下拉桿和機架之間。
7、作為一種優選,當兩個調節油缸伸長量相同且等速伸縮時,上拉桿與下拉桿保持平行,平地鏟鏟面僅垂直升降實現高程調節;當兩個調節油缸差速伸縮時,驅動端位移差異通過牛眼拉桿的球鉸自由度自適應補償角度偏差,同步改變鏟面水平傾角,實現傾角調節。
8、作為一種優選,平地鏟高度與水平聯調機構應用于多種幅寬的平地鏟,通過設置兩個下拉桿之間的安裝間距,以合理分配平地鏟推土阻力,減少平地鏟形變,減少平地鏟形變應力集中于旋轉點。
9、作為一種優選,平地機構包括平地鏟、折疊油缸、折疊支撐組件,平地鏟包括位于中間的主鏟和位于兩側的兩個副鏟,兩個副鏟的后端均通過折疊支撐組件與平地鏟的一側相接,一個折疊油缸驅動一個副鏟相對于主鏟轉動。
10、作為一種優選,當折疊油缸動作使副鏟與主鏟垂直折疊,此時的平地鏟幅寬為4米,可提高整機運輸的便捷性;當折疊油缸動作使副鏟與主鏟處于同一平面展開,此時的幅寬為7米,可提高平地作業的土方搬運效率。折疊支撐組件可提高作業狀態下平地副鏟對土方的推力,減少副鏟受阻變形。
11、作為一種優選,控制系統控制平地鏟高度與水平聯調機構,實現平地鏟高度與水平傾角一體化同步調節。
12、一種主動仿形調節支撐式水田精準平地方法,使用一種主動仿形調節支撐式水田精準平地機,包括如下步驟:
13、(1)通過控制系統控制平地鏟展開,主鏟和副鏟處于同一平面;
14、(2)將拖拉機的三點懸掛裝置調至浮動模式,讀取各力傳感器信息,調節主動仿形調節支撐機構均支撐于硬底層且平地機整體水平,記錄各主動仿形調節支撐機構的初始負載力,記為f;
15、(3)拖拉機行駛,平地機通過主動仿形調節支撐機構自動水平和高程調節;當任一主動仿形調節支撐機構的實時負載力fi<初始負載力時,即說明主動仿形調節支撐機構下硬底層變低,控制系統控制主動仿形調節支撐機構伸長,從而實時負載力增加,當fi=f時停止主動仿形調節支撐機構伸長;
16、當任一主動仿形調節支撐機構的實時負載力fi>初始負載力時,即說明主動仿形調節支撐機構下硬底層變高,控制系統控制主動仿形調節支撐機構縮短,從而實時負載力減小,當fi=f時停止主動仿形調節支撐機構縮短;
17、(4)調控平地鏟處于水平狀態,將(2)中的平地鏟高度位置,設置為平地基準高度;
18、(5)根據傳感設備分別獲取兩組下拉桿球鉸位置點平地鏟實時高度,并與前述步驟(4)設定的基準高度計算差值;
19、(6)根據平地鏟左右兩端高度差信息,控制系統獨立控制兩組調節油缸,使兩組下拉桿球鉸位置點處的平地鏟高度均運動至基準高度,保證平地鏟高度與水平傾角的一體化同步控制。
20、本發明的原理是:
21、主動仿形調節支撐機構安裝在機架前梁上,數量兩個以上,通過監測各主動仿形調節支撐機構負載,控制系統自適應調節各主動仿形調節支撐機構伸縮,使各主動仿形調節支撐機構沿硬底層仿形行駛,減少平地機整機水平和高程因地形而波動,從而減少平地機構的平地鏟傾角和高程變化幅度與頻次。平地機構通過平地鏟高度與水平聯調機構與機架連接,控制系統控制平地鏟高度與水平聯調機構,實現平地鏟高度與水平傾角一體化同步調節,進一步調整平地鏟的水平和高程實現精準平地作業。
22、本發明具有如下優點:
23、(1)本發明可以克服各種復雜硬底層環境下的水田平整作業,保證平地效果,優化平整控制策略。
24、(2)主動仿形調節支撐機構可沿機架單獨調節,當主動仿形調節支撐機構對應拖拉機后輪設置時,也確保其沿拖拉機后輪壓實后的硬底層行駛。
25、(3)通過力傳感器,能夠監測各主動仿形調節支撐機構負載力,控制系統根據負載力變化自適應調節各伸縮驅動機構伸縮,使平地機可沿硬底層仿形行駛卻保持水平和高程。
26、(4)控制系統獨立調控兩組調節油缸,可對平地鏟高度與水平傾角進行聯合控制,優化平地鏟高度和水平調節結構,減輕平地鏟變形和因變形導致的應力集中,突破傳統平地鏟形變應力集中于旋轉點不適應于大型幅寬平地機的弊端。
27、(5)折疊支撐組件可提高整機運輸的便捷性;在作業時,可提高土方搬運效率,并減少副鏟受阻變形。
- 還沒有人留言評論。精彩留言會獲得點贊!