一種新型多感覺上肢運動測量系統
本發明涉及醫療康復設備,一種新型多感覺上肢運動測量系統。
背景技術:
1、在康復醫療領域,腦卒中患者的康復治療一直是研究的重點與難點。隨著醫療技術的進步,康復訓練手段不斷發展,但仍面臨諸多挑戰。傳統的康復訓練往往側重于單純的肢體運動訓練,例如依靠康復治療師手動輔助患者進行關節活動或使用簡單的機械裝置引導肢體運動。這種方式缺乏對患者在訓練過程中全面狀態的精準監測與量化評估,難以深入了解患者的神經肌肉控制情況以及康復進展的細微變化。
2、近年來,虛擬現實(vr)技術逐漸被引入多感覺訓練中,旨在為患者提供更加豐富和沉浸式的訓練環境。然而,現有的vr多感覺訓練設備與患者實際運動數據的結合存在明顯不足。一方面,在獲取患者上肢姿態信息時,多數設備采用的方法不夠精準和全面,例如imu所獲取的位置信息會出現累計誤差,無法準確地反映上肢在三維空間中的復雜運動,包括各個關節的細微角度變化以及肢體整體的空間位置和姿態變化。這導致在vr場景中虛擬上肢與患者真實上肢的運動同步性較差,容易出現延遲、偏差等問題,嚴重影響患者的深度感知和訓練效果。
3、另一方面,在多感覺數據采集方面也存在缺陷。對于手部的觸覺、溫度覺等感覺信息的采集不夠完善,未能充分模擬真實環境中的感官刺激,使得患者在vr訓練過程中難以獲得真實的交互體驗。例如,在抓取虛擬物體時,無法準確感知物體的質地、重量和溫度等屬性,這對于患者的運動再學習和神經功能重塑極為不利,甚至可能導致患者形成適應不良的運動模式,限制了功能恢復的潛力。
4、同時,隨著康復醫學對個性化治療方案的需求日益增長,現有的康復設備難以滿足根據患者個體差異進行精準康復訓練的要求。缺乏對患者多維度數據的深度分析和有效利用,無法針對每位患者獨特的康復狀況制定優化的訓練策略,從而降低了康復治療的效率和成功率。綜上所述,開發一種能夠基于正向運動學建模方法精確獲取上肢姿態信息,并實現多感覺數據采集的數據手套具有極其重要的意義,它有望填補現有康復技術的空白,為腦卒中患者及其他上肢康復需求者提供更加高效、精準和個性化的康復訓練解決方案,推動康復醫療技術的進一步發展。
技術實現思路
1、發明目的:本發明目的是提供一種新型多感覺上肢運動測量系統,解決現有肢體運動和感知訓練與vr訓練融合不足,致使患者多感覺刺激欠缺、運動反饋失準,進而產生深度感知困難、易形成不良運動習慣并限制功能恢復等一系列問題,通過創新的技術手段實現二者的深度交互與精準協同,提升康復訓練的有效性和個性化程度,助力患者更好地恢復肢體功能與神經感知能力。
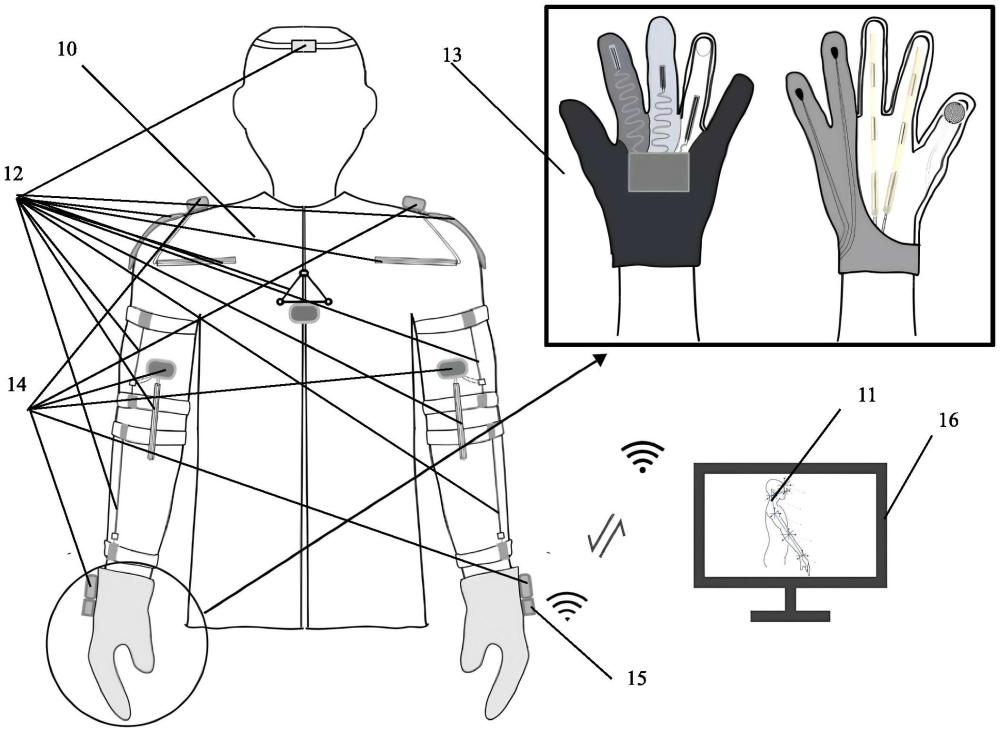
2、技術方案:本發明所述的新型多感覺上肢運動測量系統,包括軟體毛氈服裝集成多模態數據采集系統和多模信號處理傳輸模塊;運動測量子系統和感覺測量子系統分別獲取運動和感知的多模信號傳輸給多模信號處理模塊進行放大、濾波處理;無線信號集中器收集來自多模信號處理模塊處理過后的數據,并發送給電腦客戶端,此過程可用wifi傳輸;電腦客戶端整合多模態信號構建一套完整、精確且實時更新的上肢運動感知狀態信息體系,其包括上肢運動計算模型和多感覺信息實時狀態;上肢運動計算模型通過運動測量子系統采集的多模信號進行計算,形成有各關節實時位置坐標數據的運動模型。
3、進一步地,所述系統由軟體毛氈服裝用于集成和固定所述運動測量子系統、感覺測量子系統、多模信號處理模塊、數據藍牙傳輸模塊及無線信號集中器于一個穿戴設備;
4、所述上肢運動計算模型通過運動多模數據計算上肢關節的實時位置,包括三角函數、向量旋轉、坐標變換的計算;
5、所述運動測量子系統采集運動時上肢關節運動的內收外展、前伸后屈以及內外旋的角度數據,頭部相對于胸鎖關節的位置關系,固定在測量對應數據的對應獲取位置,采集對應原始電信號輸出到多模信號處理模塊;
6、所述感覺測量子系統采集手部溫度和壓力信號,獲取溫感、觸覺和痛覺,并輸出原始電信號;
7、所述多模信號處理模塊接收源自運動測量子系統和感覺測量子系統的原始電信號,對其進行濾波、放大以及針對特定關節運動數據的特征提取,再將處理后的多模態數據分別傳輸到數據藍牙傳輸模塊及無線信號集中器;
8、所述數據藍牙傳輸模塊及無線信號集中器在完成藍牙數據匯聚整合后,將所有數據傳輸給電腦客戶端;
9、所述電腦終端對接收到的數據構建上肢運動感知狀態信息體系,包括上肢運動計算模型和多感覺信息實時狀態。
10、進一步地,所述上肢運動計算模型包括從胸鎖關節o0到肩關節旋轉中心o2、肘關節旋轉中心o3、腕關節旋轉中心o4、掌指關節、近端指關節、遠端指關節、指尖依次連接,另外的,o1為所述超聲波接收時鐘同步設備所在位置局部坐標系原點,所述上肢運動計算模型計算過程如下:
11、所述胸鎖關節為全局坐標系原點胸鎖關節為全局坐標系原點o,規定向前為x軸正方向(人體正前方),向左為y軸正方向(人體左側),向上為z軸正方向(垂直地面向上),建立右手直角坐標系.其余各關節點的局部坐標系方向與之相同;
12、所述肩關節旋轉中心o2相對于胸鎖關節o0的坐標變換,設測量的肩寬為dshoulder,所以一半肩寬為l1,根據解剖學知識設其在全局坐標系x軸方向上,且在水平線上,則肩關節旋轉中心相對于胸鎖關節的坐標為(x2,y2,z2)=(0,l1,0)(此處忽略人體個體差異帶來的微小垂直方向偏移,以左側上肢為例);
13、所述肘關節旋轉中心o3相對于肩關節旋轉中心的坐標計算,設大臂長度為lupperarm,上臂繞肩關節轉動中心o2局部坐標系x2軸的旋轉角為θ1,上臂繞肩關節旋轉中心o2局部坐標系z軸的旋轉角為θ2,則在全局坐標系下o3的坐標為(x3,y3,z3):
14、
15、所述腕關節旋轉中心為o4,上臂矢量為其長度為lupperarm,前臂矢量為其長度為lforearm,∠o2o3o4=α1,繞上臂矢量旋轉的角度為α2,在肘關節屈曲后與夾角為α1,表示為(δx,δy,δz),根據向量投影和三角函數關系可得:
16、
17、進行繞的旋轉α2,通過羅德里格斯旋轉公式(ro乩gues′rotation?formula)來計算:
18、r=i+(sinα2)k+(1-sinα2)k2
19、其中i是單位矩陣k是與旋轉軸對應的反對稱矩陣,其形式為:
20、
21、先計算k2:
22、
23、然后將其代入羅德里格斯旋轉公式計算出旋轉矩陣r:
24、
25、將在初始位置的坐標(δx,δy,δz)與旋轉矩陣r相乘,得到旋轉后的坐標(x4,y4,z4),即:
26、
27、通過矩陣乘法展開可得x4,y4,z4的具體表達式;
28、所述腕關節到掌骨關節的坐標變換,通過拉力傳感裝置獲取到肘關節內外旋角度,用和計算腕關節坐標相同的方法計算得出,掌指關節對于全局坐標系的坐標;
29、所述掌指關節、所述近端指關節、所述遠端指關節只考慮其在一個平面內的屈曲運動,忽略其他方向的運動以及手指的軟組織變形等因素,設指關節旋轉角度為γi,沿x平移了di距離,i為指節編號,相鄰指節間的齊次變換矩陣為:
30、
31、由此獲取到每個手指關節以及指尖相對于全局坐標系的坐標。
32、進一步地,所述運動測量子系統由多種高精度傳感器協同構成,包括拉力傳感裝置、單軸柔性彎曲應變傳感器、超聲波低功耗超聲波發射器模塊、超聲波接收裝置、時鐘同步模塊、柔性印刷電路板和電氣連接線,其中,
33、所述拉力傳感裝置由綁帶、拉力傳感器、彈力繩構成,其中,所述綁帶分別在上臂靠近肩關節和肘關節位置、前臂靠近肘關節和腕關節的位置固定;所述拉力傳感器和所述彈力繩相互連接,手臂自然下垂,掌心朝身體一側時,垂直地將兩端固定在綁帶上;
34、所述單軸柔性彎曲應變傳感器放置于肩部、腕關節和手指關節,緊密貼合肢體,輸出關節運動時角度的連續變化,作為上肢正向運動學建模的參數,幫助構建實時上肢運動姿態;
35、所述低功耗超聲波發射器模塊作為所述正向運動學上肢建模的全局坐標系,向安裝在頭部的所述超聲波接收裝置發射超聲波信號;
36、所述超聲波接收時鐘同步設備由綁帶固定在頭部,精確記錄超聲波的傳播時間,并實現超聲波發射器與接收器時鐘的精確同步;
37、所述電氣連接線與所述柔性印刷電路板設計為特殊形狀,以提供關節彎曲的位移補償,連接所述柔性彎曲應變傳感器與所述多模信號處理模塊。
38、進一步地,所述感覺測量子系統由條狀柔性壓電薄膜傳感器、圓形壓力薄膜傳感器和高精度熱敏電阻溫感傳感器構成。
39、所述條狀柔性壓電薄膜傳感器在手套自手掌根部向指尖方向放置,有三個敏感單元,對應指腹、掌心和手掌根部,同時獲取多個關節部位的壓力信息,識別不同抓握手勢,壓力值不為0時則表示有接觸,壓力值超過閾值則表示有痛覺;
40、所述圓形壓力薄膜傳感器放置在拇指指尖,獲取拇指觸覺和痛覺信息,壓力值不為0時則表示有接觸,壓力值超過閾值則表示有痛覺;
41、所述高精度熱敏電阻溫感傳感器放置于指腹部位,時刻監測指尖接觸環境的溫度變化,為還原真實觸感體驗和深入分析患者對溫度的感知反饋提供關鍵數據。
42、進一步地,所述拉力傳感模塊獲取肩關節和肘關節旋轉角度n的方法是:將上臂看作是底面圓周長為cupperarm,高為hupperarm的圓柱體,當肩關節內外旋時,兩端固定在綁帶上的彈性繩會產生彈性應變x,由胡可定律指出彈簧的彈力f與彈簧的伸長或壓縮量x成正比,其表達式為f=kx,其中k為彈性系數。那么,已知彈性系數k和拉力fupperarm,則伸長量x=fupperarm/k。由此可得伸長后的彈性繩和其初始狀態以及圓柱底邊所構成的三角形的底邊長為可得所述肩關節內外旋角度計算公式為:
43、
44、同理底面周長為cforearm,高為hforearm的前臂圓柱體的內外旋角度nforearm為:
45、
46、進一步地,所述低功耗超聲波發射器模塊(242)與所述超聲波接收時鐘同步設備(243)用于確定胸鎖關節o0相對于所述超聲波接收時鐘同步設備(243)o1的坐標(x0,y0,z0),設超聲波在當前環境下的傳播速度為v(其根據環境溫度t按照v=331.4+0.6t計算得出),胸鎖關節o0處的三個超聲波發射器a、b、c構成三角形,設a、b、c三點到對應固定在頭頂的所述超聲波接收時鐘同步設備(243)的飛行時間分別為ta、tb、tc,則可根據空間幾何關系計算胸鎖關節o0位置坐標:
47、
48、其中(xa,ya,za)、(xb,yb,zb)、(xc,yc,zc)為胸鎖關節處三個超聲波發射器a、b、c在全局坐標系下的已知坐標位置,通過解上述方程組可得到胸鎖關節o0相對于頭頂所述超聲波接收時鐘同步設備(243)o1的坐標(x0,y0,z0),則可以通過兩點的坐標變換得到頭頂所述所述超聲波接收時鐘同步設備(243)o1相對于全局坐標系胸鎖關節o0的坐標為(-x0,-y0,-z0)。
49、本發明與現有技術相比,具有如下有益效果:
50、1、針對傳統上肢運動測量系統在數據采集方面傳感器類型單一、數據模態有限的狀況,本發明所構建的新型多感覺上肢運動測量系統整合了拉力傳感裝置、條狀柔性壓電薄膜傳感器、高精度熱敏電阻溫感傳感器、柔性彎曲應變傳感器、超聲波發射器與接收器等多種高精度傳感器。這些傳感器協同運作,能夠同步采集觸覺、溫度、角度、拉力和位置等多模態數據,從而為全面且深入地分析上肢運動狀態提供了豐富而精準的數據基礎,極大地彌補了傳統技術在數據全面性與精確性上的不足。
51、2、考慮到現有技術在數據處理與傳輸過程中常面臨的濾波效果不佳、傳輸不穩定以及數據整合困難等問題,本發明的數據處理與藍牙傳輸模塊采用了可編程濾波器芯片,可依據不同傳感器信號特性靈活調整濾波參數,確保信號的純凈性。同時,藍牙傳輸單元具備信號強度檢測功能,能根據信號狀況動態調整傳輸功率或執行重傳策略,保障數據穩定傳輸。此外,無線數據集中器能夠高效地匯聚整合多源數據,并借助wifi模塊實現與電腦終端的快速可靠通信,實現了數據的流暢處理與無縫傳輸,有效提升了整個系統的數據處理效率與傳輸可靠性。
52、3、針對以往上肢運動測量體系難以構建精確且實時更新的運動學模型的缺陷,本發明依據人體解剖學與測量學知識,以胸鎖關節為原點構建全局坐標系,利用柔性彎曲應變傳感器測量關節夾角,并結合超聲波定位技術確定關鍵關節位置,從而建立起一套完整的上肢正向運動學模型。該模型不僅涵蓋了從胸鎖關節到肩關節、肘關節、腕關節直至手指關節等各個關鍵部位,而且能夠根據傳感器實時反饋的數據進行動態更新,精確還原上肢在空間中的運動姿態,為醫療康復、虛擬現實交互等應用場景提供了極為精準的運動信息支持,有力地推動了相關領域的技術發展與應用拓展。
- 還沒有人留言評論。精彩留言會獲得點贊!