游戲手柄的感應方法、裝置、設備及存儲介質與流程
本申請涉及游戲手柄感應,尤其涉及一種游戲手柄的感應方法、裝置、設備及存儲介質。
背景技術:
1、傳統的游戲手柄主要依賴單一的按鍵和搖桿輸入,難以滿足現代游戲對精確性和沉浸感的要求。雖然新一代游戲手柄引入了陀螺儀、加速度計和壓力傳感器等多種感應元件,但這些傳感器數據的有效融合和精確控制仍然面臨挑戰。
2、現有的游戲手柄感應方法往往采用簡單的數據融合策略,未能充分利用多模態傳感器數據之間的復雜關聯關系。特別是在處理高速動作和精細操作時,傳感器數據的噪聲、延遲和不同玩家的操作習慣差異,都會影響控制的準確性。此外,無線傳輸中的隨機延遲問題也會導致位置控制和力反饋響應的不穩定,影響游戲體驗的連貫性。
技術實現思路
1、本申請提供了一種游戲手柄的感應方法、裝置、設備及存儲介質,進而保證了控制指令的精確執行,極大地提升了游戲手柄的操控體驗。
2、本申請第一方面提供了一種游戲手柄的感應方法,所述游戲手柄的感應方法包括:
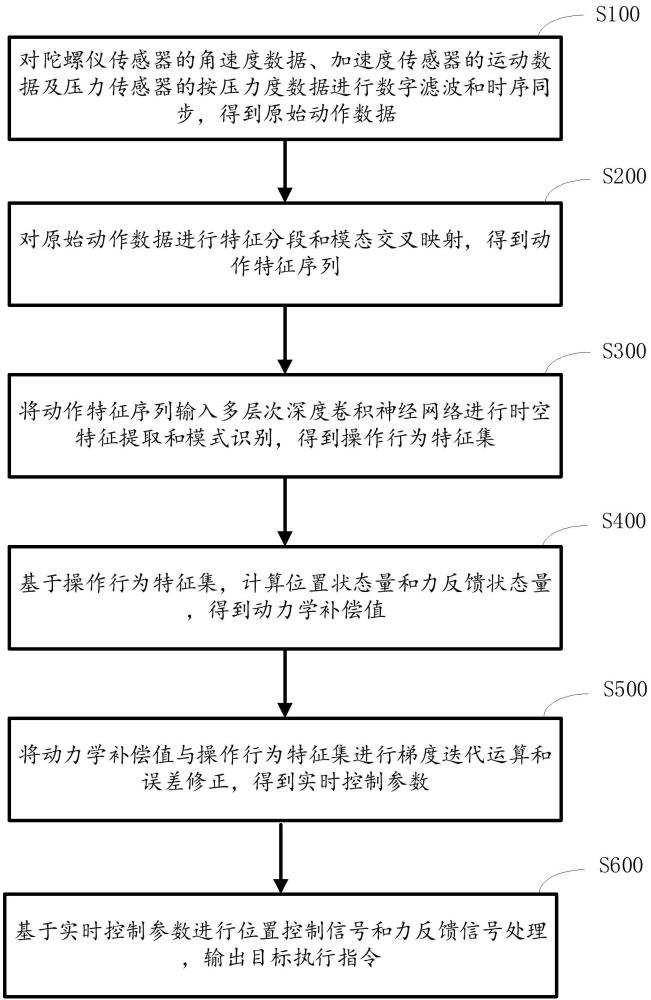
3、對陀螺儀傳感器的角速度數據、加速度傳感器的運動數據及壓力傳感器的按壓力度數據進行數字濾波和時序同步,得到原始動作數據;
4、對所述原始動作數據進行特征分段和模態交叉映射,得到動作特征序列;
5、將所述動作特征序列輸入多層次深度卷積神經網絡進行時空特征提取和模式識別,得到操作行為特征集;
6、基于所述操作行為特征集,計算位置狀態量和力反饋狀態量,得到動力學補償值;
7、將所述動力學補償值與所述操作行為特征集進行梯度迭代運算和誤差修正,得到實時控制參數;
8、基于所述實時控制參數進行位置控制信號和力反饋信號處理,輸出目標執行指令。
9、本申請第二方面提供了一種游戲手柄的感應裝置,所述游戲手柄的感應裝置包括:
10、同步模塊,用于對陀螺儀傳感器的角速度數據、加速度傳感器的運動數據及壓力傳感器的按壓力度數據進行數字濾波和時序同步,得到原始動作數據;
11、映射模塊,用于對所述原始動作數據進行特征分段和模態交叉映射,得到動作特征序列;
12、識別模塊,用于將所述動作特征序列輸入多層次深度卷積神經網絡進行時空特征提取和模式識別,得到操作行為特征集;
13、計算模塊,用于基于所述操作行為特征集,計算位置狀態量和力反饋狀態量,得到動力學補償值;
14、修正模塊,用于將所述動力學補償值與所述操作行為特征集進行梯度迭代運算和誤差修正,得到實時控制參數;
15、輸出模塊,用于基于所述實時控制參數進行位置控制信號和力反饋信號處理,輸出目標執行指令。
16、本申請第三方面提供了一種電子設備,包括:存儲器和至少一個處理器,所述存儲器中存儲有指令;所述至少一個處理器調用所述存儲器中的所述指令,以使得所述電子設備執行上述的游戲手柄的感應方法。
17、本申請的第四方面提供了一種計算機可讀存儲介質,所述計算機可讀存儲介質中存儲有指令,當其在計算機上運行時,使得計算機執行上述的游戲手柄的感應方法。
18、與現有技術相比,本申請具有以下有益效果:通過引入雙向交叉感知機制和多層次深度卷積神經網絡,實現了多模態傳感器數據的高效融合和特征提取,提高了控制精度;采用自適應學習算法對用戶操作習慣進行建模,使控制系統能夠根據不同玩家的特點動態調整參數;設計了基于卡爾曼濾波的延遲預測和補償機制,有效解決了無線傳輸延遲問題,將位置誤差和力反饋誤差分別控制在預設范圍內;通過梯度迭代優化和誤差修正策略,確保了控制參數的實時更新和優化;采用分級驅動和優先級調度機制,保證了控制指令的精確執行,極大地提升了游戲手柄的操控體驗。
技術特征:
1.一種游戲手柄的感應方法,其特征在于,所述方法包括:
2.根據權利要求1所述的游戲手柄的感應方法,其特征在于,所述對陀螺儀傳感器的角速度數據、加速度傳感器的運動數據及壓力傳感器的按壓力度數據進行數字濾波和時序同步,得到原始動作數據,包括:
3.根據權利要求2所述的游戲手柄的感應方法,其特征在于,所述對所述原始動作數據進行特征分段和模態交叉映射,得到動作特征序列,包括:
4.根據權利要求3所述的游戲手柄的感應方法,其特征在于,所述將所述動作特征序列輸入多層次深度卷積神經網絡進行時空特征提取和模式識別,得到操作行為特征集,包括:
5.根據權利要求4所述的游戲手柄的感應方法,其特征在于,所述基于所述操作行為特征集,計算位置狀態量和力反饋狀態量,得到動力學補償值,包括:
6.根據權利要求5所述的游戲手柄的感應方法,其特征在于,所述將所述動力學補償值與所述操作行為特征集進行梯度迭代運算和誤差修正,得到實時控制參數,包括:
7.根據權利要求6所述的游戲手柄的感應方法,其特征在于,所述基于所述實時控制參數進行位置控制信號和力反饋信號處理,輸出目標執行指令,包括:
8.一種游戲手柄的感應裝置,其特征在于,用于執行如權利要求1-7中任一項所述的游戲手柄的感應方法,所述游戲手柄的感應裝置包括:
9.一種電子設備,其特征在于,所述電子設備包括:存儲器和至少一個處理器,所述存儲器中存儲有指令;
10.一種計算機可讀存儲介質,所述計算機可讀存儲介質上存儲有指令,其特征在于,所述指令被處理器執行時實現如權利要求1-7中任一項所述的游戲手柄的感應方法。
技術總結
本申請涉及游戲手柄感應技術領域,公開了一種游戲手柄的感應方法、裝置、設備及存儲介質,該方法包括:對陀螺儀傳感器的角速度數據、加速度傳感器的運動數據及壓力傳感器的按壓力度數據進行數字濾波和時序同步,得到原始動作數據;進行特征分段和模態交叉映射,得到動作特征序列;輸入多層次深度卷積神經網絡進行時空特征提取和模式識別,得到操作行為特征集;計算得到動力學補償值;進行梯度迭代運算和誤差修正,得到實時控制參數;基于實時控制參數進行位置控制信號和力反饋信號處理,輸出目標執行指令,進而保證了控制指令的精確執行,極大地提升了游戲手柄的操控體驗。
技術研發人員:馬堯
受保護的技術使用者:廣州小雞快跑網絡科技有限公司
技術研發日:
技術公布日:2025/4/6
- 還沒有人留言評論。精彩留言會獲得點贊!