一種清潔機器人的制作方法
本申請涉及清潔設備,特別涉及一種清潔機器人。
背景技術:
1、相關技術中,清潔機器人通過電機驅動清潔件伸出機體對墻角等障礙物周邊的清潔死區進行清潔。
2、然而,這種清潔方式一方面首先需要識別清潔死區,而識別清潔死區的準確度不高,容易發生誤判;另一方面電機驅動清潔件伸出機體需要時間,導致清掃延遲,影響清掃效率。
技術實現思路
1、本申請提供了一種清潔機器人,能夠準確、及時、高效地實現墻角等障礙物周邊清潔死區的清潔。
2、本申請提供的一種清潔機器人,包括:
3、底盤;
4、清潔裝置,包括相連的清潔件和擺動機構,所述擺動機構轉動設置于所述底盤的底部;所述擺動機構具有外擴位置及所述外擴位置兩側的第一隱藏位置和第二隱藏位置;以及
5、外擴機構,分別與所述底盤和所述擺動機構相連,在不受外力的情況下,所述外擴機構能夠使所述擺動機構保持在所述外擴位置;
6、其中,在外力和所述外擴機構的共同作用下,所述擺動機構能夠在所述外擴位置與所述第一隱藏位置之間以及所述外擴位置與所述第二隱藏位置之間移動。
7、本申請方案中,不受外力的擺動機構一直保持在外擴位置,而外擴位置的擺動機構至少部分顯露于底盤外側,因此能夠使與擺動機構相連的清潔件立即實現對墻角等障礙物周邊清潔死區的清掃。而當擺動機構受外力(例如墻體施加在擺動機構上的反作用力)作用時,擺動機構才從外擴位置向外擴位置兩側的第一隱藏位置或第二隱藏位置移動。當外力足夠大時,擺動機構才最終移動至外擴位置兩側的第一隱藏位置或第二隱藏位置。本申請方案無需對清潔死區進行識別,清潔機器人移動至清潔死區即可對清潔死區的清掃,并且擺動機構在不受外力時至少部分一直保持在顯露于底盤外側的外擴位置,也不需要電機驅動而伸出,因此不會導致清掃延遲,降低清掃效率。可見,本申請方案能夠準確、及時、高效地實現墻角等障礙物周邊清潔死區的清潔。
8、在某些可能的實現方式中,所述外擴機構包括:
9、突出部,設置于所述擺動機構的周側;
10、兩個彈性件,圍繞所述擺動機構間隔設置于所述底盤;所述彈性件的第一端與所述底盤固連,所述彈性件的第二端作用于所述突出部。
11、結合上述實現方式,在某些可能的實現方式中,所述底盤開設有安裝孔;
12、所述擺動機構包括:
13、傳動結構,所述清潔件連接在所述傳動結構的一側;所述清潔件和所述傳動結構位于所述底盤的下側;及
14、驅動電機,連接在所述傳動結構的另一側;至少部分所述驅動電機經所述安裝孔伸出至所述底盤的上側。
15、結合上述實現方式,在某些可能的實現方式中,所述底盤具有容納所述傳動結構的凹陷部;
16、所述清潔機器人還包括:
17、碰撞件,所述碰撞件位于所述清潔機器人的周側,并且所述碰撞件對應所述傳動結構處設置有避讓缺口。
18、結合上述實現方式,在某些可能的實現方式中,還包括:
19、安裝組件,所述安裝組件包括:
20、限位凸緣,形成于所述傳動結構的周側;
21、限位件,可拆卸地設置于所述驅動電機的周側;
22、其中,所述限位凸緣和所述限位件的輪廓均大于所述安裝孔的孔徑,以限制所述擺動機構沿所述安裝孔的軸線移動。
23、結合上述實現方式,在某些可能的實現方式中,所述限位件為環形件,所述限位件套設在所述驅動電機的外周;
24、所述限位件的外周開設有弧形缺口,以形成所述突出部。
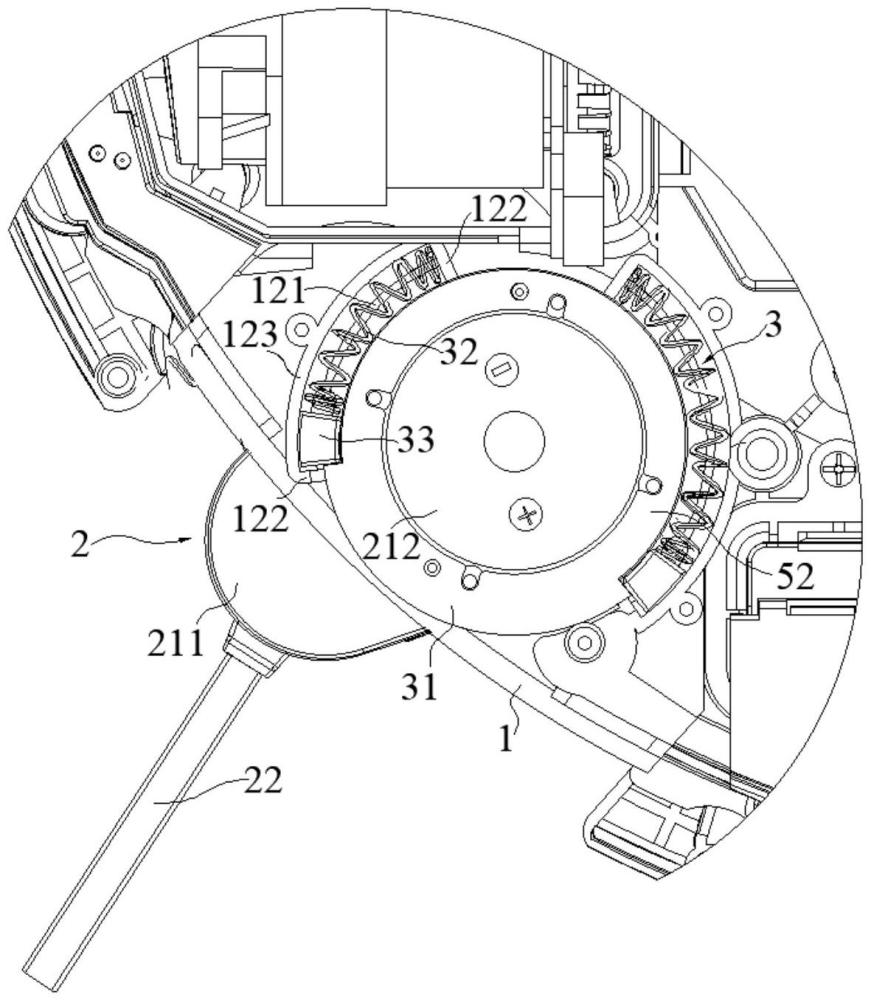
25、結合上述實現方式,在某些可能的實現方式中,所述外擴機構還包括:
26、滑塊,與所述彈性件的第二端相連,所述滑塊抵靠所述突出部。
27、結合上述實現方式,在某些可能的實現方式中,沿所述滑塊的運動軌跡,所述滑塊或所述底盤中的一者設有導向凹槽,另一者設有與所述導向凹槽相適配地導向凸起。
28、結合上述實現方式,在某些可能的實現方式中,所述底盤上對應所述導向凹槽或導向凸起的兩端分別設有一個止擋部。
29、結合上述實現方式,在某些可能的實現方式中,所述底盤上位于所述滑塊遠離所述驅動電機的一側設有擋板,所述擋板的兩端與兩個所述止擋部相連。
30、結合上述實現方式,在某些可能的實現方式中,所述擺動機構還包括:
31、保護殼,罩設于所述驅動電機且與所述底盤固定連接。
32、結合上述實現方式,在某些可能的實現方式中,所述保護殼的端部設有端蓋凸緣;
33、所述端蓋凸緣扣設在所述止擋部和所述擋板上,以包裹所述滑塊、所述導向凹槽和所述導向凸起。
技術特征:
1.一種清潔機器人,其特征在于,包括:
2.如權利要求1所述的清潔機器人,其特征在于,所述外擴機構(3)包括:
3.如權利要求2所述的清潔機器人,其特征在于,所述底盤(1)開設有安裝孔(111);
4.如權利要求3所述的清潔機器人,其特征在于,所述底盤(1)具有容納所述傳動結構(211)的凹陷部(112);
5.如權利要求3所述的清潔機器人,其特征在于,還包括:
6.如權利要求5所述的清潔機器人,其特征在于,所述限位件(52)為環形件,所述限位件(52)套設在所述驅動電機(212)的外周;
7.如權利要求3至6任一項所述的清潔機器人,其特征在于,所述外擴機構(3)還包括:
8.如權利要求7所述的清潔機器人,其特征在于,沿所述滑塊(33)的運動軌跡,所述滑塊(33)或所述底盤(1)中的一者設有導向凹槽(331),另一者設有與所述導向凹槽(331)相適配地導向凸起(121)。
9.如權利要求8所述的清潔機器人,其特征在于,所述底盤(1)上對應所述導向凹槽(331)或導向凸起(121)的兩端分別設有一個止擋部(122)。
10.如權利要求9所述的清潔機器人,其特征在于,所述底盤(1)上位于所述滑塊(33)遠離所述驅動電機(212)的一側設有擋板(123),所述擋板(123)的兩端與兩個所述止擋部(122)相連。
11.如權利要求10所述的清潔機器人,其特征在于,所述擺動機構(21)還包括:
12.如權利要求11所述的清潔機器人,其特征在于,所述保護殼(23)的端部設有端蓋凸緣(231);
技術總結
本申請提供一種清潔機器人,該清潔機器人包括底盤、清潔裝置及外擴機構;清潔裝置包括相連的清潔件和擺動機構,所述擺動機構轉動設置于所述底盤的底部;所述擺動機構具有外擴位置及所述外擴位置兩側的第一隱藏位置和第二隱藏位置;外擴機構分別與所述底盤和所述擺動機構相連,在不受外力的情況下,所述外擴機構能夠使所述擺動機構保持在所述外擴位置;其中,在外力和所述外擴機構的共同作用下,所述擺動機構能夠在所述外擴位置與所述第一隱藏位置之間以及所述外擴位置與所述第二隱藏位置之間移動。通過本申請能夠準確、及時、高效地實現墻角等障礙物周邊清潔死區的清潔。
技術研發人員:李江,賀志武
受保護的技術使用者:安克創新科技股份有限公司
技術研發日:20240710
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!