一種基于AI人工智能的泛科技信息服務機器人的制作方法
本發明涉及機器人裝置,具體為一種基于ai人工智能的泛科技信息服務機器人,屬于機器人設備。
背景技術:
1、服務機器人是機器人家族中的一個年輕成員,到目前為止尚沒有一個嚴格的定義。不同國家對服務機器人的認識不同。可以分為專業領域服務機器人和個人/家庭服務機器人,服務機器人的應用范圍很廣,主要從事維護保養、修理、運輸、清洗、保安、救援、監護等工作。
2、經檢索,中國專利號cn110815256a公開了一種基于ai人工智能的泛科技信息服務機器人,根據控制箱的四側壁上分別對稱安裝有兩個熱感傳感器,可通過熱感傳感器捕捉室內的人或者熱感設備的蹤跡,根據預設程序,移動到所在熱感探測對象的位置進行工作,而超聲波傳感器則能夠通過探測進行避障,麥克風的設置,可通過語音識別進行程序控制。但工廠環境復雜,在使用信息服務機器人時,由于工人較多以及環境噪音多,在對信息服務機器人通過麥克風下達指令時,周圍環境較為吵鬧,機器人存在無法識別或識別不清晰的問題,導致操作緩慢,影響工作進度。
技術實現思路
1、本發明的目的就在于為了解決上述問題而提供一種基于ai人工智能的泛科技信息服務機器人。
2、本發明通過以下技術方案來實現上述目的,一種基于ai人工智能的泛科技信息服務機器人,包括機器人主體,所述機器人主體包括硬件設備以及軟件系統,所述硬件設備包括可視化組件、放置組件、多傳感器融合組件以及移動組件;
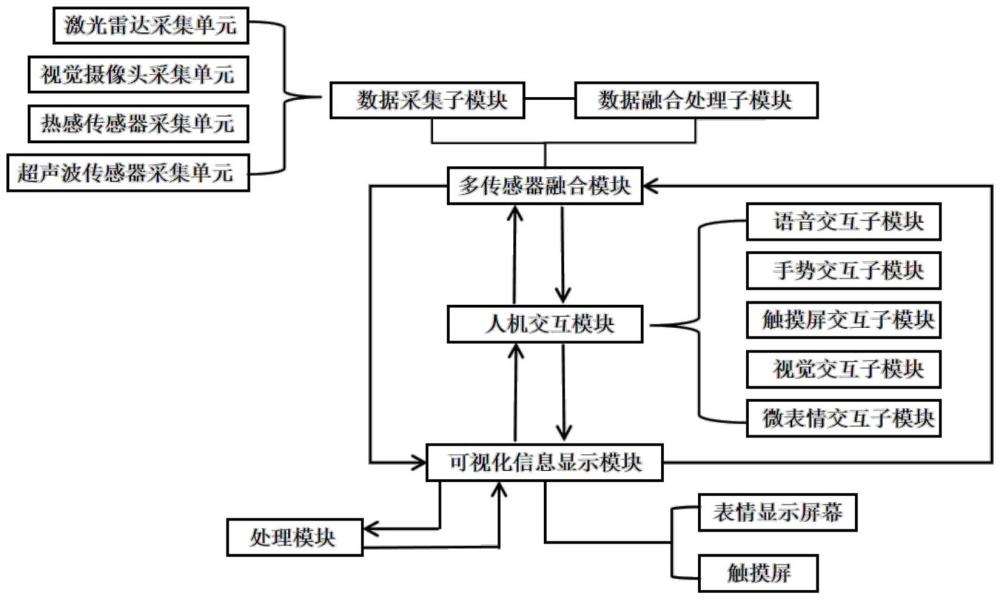
3、所述軟件系統包括多傳感器融合模塊、人機交互模塊、可視化信息顯示模塊以及處理模塊;
4、所述多傳感器融合模塊用于使所述機器人主體能精準感知環境全貌、賦能所述機器人主體的智能決策,通過所述多傳感器融合組件采集到的數據進行處理,再通過可視化信息顯示模塊進行展示,所述多傳感器融合模塊包括數據采集子模塊以及數據融合處理子模塊,所述數據采集子模塊包括激光雷達采集單元、視覺攝像頭采集單元、熱傳感器采集單元以及超聲波傳感器采集單元;
5、所述人機交互模塊用于提升客戶的使用需求,所述人機交互模塊包括語音交互子模塊、手勢交互子模塊、觸摸屏交互子模塊、視覺交互子模塊以及微表情交互子模塊;
6、所述可視化信息顯示模塊用于將抽象知識具象化呈現,同時能更進行異常預警與故障排查,所述可視化信息顯示模塊能夠增強所述人機交互模塊的體驗。
7、優選的,所述可視化組件用于提高使用者的交互性,所述可視化組件包括立板、支撐板、顯示主機、表情顯示屏幕以及觸摸顯示屏,所述機器人主體的一側設有立板,所述立板的頂端設有支撐板,所述支撐板的頂端設有顯示主機,所述立板遠離所述機器人主體的一側設有觸摸顯示屏,所述顯示主機靠近所述觸摸顯示屏的一側設有表情顯示屏幕;
8、所述移動組件用于所述機器人主體在使用過程中進行位移和多角度轉動,所述移動組件包括底座、萬向輪、驅動電機以及放置塊,所述機器人主體的底端設有底座,所述底座的底端且位于四個拐角處均設有萬向輪,所述底座的頂端中間設有驅動電機,所述驅動電機的執行端連接有放置塊;
9、所述放置組件用于使用者在使用過程中將一些物品放置在所述機器人主體上進行傳送,所述放置組件包括豎板、斜板、限位桿以及放置框,所述立板遠離所述觸摸顯示屏的一側且位于所述放置塊的頂端設有豎板,所述豎板的底端連接有斜板,所述放置塊遠離所述斜板的一側頂端設有限位桿,所述限位桿自上而下依序設有多個放置框;
10、所述多傳感器融合組件配合所述可視化組件用于提高使用者的交互性,同時使所述機器人主體能更對環境進行判斷,規避風險并進行預警,所述多傳感器融合組件包括激光雷達、視覺攝像頭、熱感傳感器以及超聲波傳感器,所述顯示主機的頂端設有激光雷達,所述觸摸顯示屏的頂端設有視覺攝像頭,所述放置塊的四個面以及所述顯示主機的兩側均設有熱感傳感器,所述底座的底端四周靠近所萬向輪位置處設有激光雷達。
11、優選的,所述語音交互子模塊基于語音識別算法以及語音合成算法,所述手勢交互子模塊基于手勢識別算法以及手勢交互反饋算法,所述觸摸屏交互子模塊基于觸摸操作響應算法和任務進度顯示算法,所述視覺交互子模塊基于表情動畫生成算法以及知識可視化展示算法,所述微表情交互子模塊基于微表情捕捉算法、微表情識別算法和微表情交互應用算法。
12、優選的,所述激光雷達采集單元基于激光發射與接收控制算法、點云數據構建算法,所述視覺攝像頭采集單元基于自動對焦與曝光控制算法、數據壓縮算法,所述熱傳感器采集單元基于溫度計算與補償算法、濾波與去噪算法、圖像重建與增強算法以及目標識別與跟蹤算法,所述超聲波傳感器采集單元基于渡越時間算法以及多次測量取平均值算法。
13、優選的,所述多傳感器融合模塊中的激光雷達采集單元、視覺攝像頭采集單元、熱傳感器采集單元以及超聲波傳感器采集單元同步啟動數據采集工作。
14、優選的,所述支撐板設置在所述豎板以及所述斜板的頂端,所述支撐板、豎板以及斜板呈三角形狀設置。
15、優選的,所述豎板以及斜板內部設有喇叭,所述觸摸顯示屏的側面設有麥克風。
16、優選的,所述放置框遠離所述限位桿的一側與所述斜板固定連接。
17、優選的,所述底座以及所述放置塊呈矩形設置,所述底座以及所述放置塊矩形四個拐角均為圓弧狀設置。
18、本發明具有以下有益效果:
19、1、在機器人身上搭載高精度麥克風陣列,不僅用于語音識別,還能通過分析語音的音調、語速、音量變化等特征,判斷用戶的情緒狀態,同時,配備視覺攝像頭,引入面部表情識別技術、手勢分析技術,利用深度學習模型識別用戶的面部肌肉運動,精準判斷喜怒哀樂等情緒,實現多模態情感信息融合感知,在環境較為嘈雜時通過使用者的手勢對機器人下達指令,提高機器人的人機交互;
20、2、引入激光雷達技術,利用激光束對周圍環境進行高精度掃描,構建三維環境地圖;結合視覺攝像頭,運用深度學習算法對圖像進行實時分析,識別物體的形狀、類別與運動狀態;通過將熱感、超聲、激光雷達、視覺等多傳感器數據進行融合處理,運用貝葉斯估計、卡爾曼濾波等算法實現更精準的環境感知與定位,讓機器人能在復雜環境中自如穿梭;
21、3、機器人通過語音交互子模塊、手勢交互子模塊、觸摸屏交互子模塊、視覺交互子模塊以及微表情交互子模塊的緊密配合,全方位適應不同用戶需求與場景,極大提升了服務質量,拉近了與用戶的距離,為用戶帶來卓越的智能交互體驗;
22、4、在機器人頂端增設表情顯示屏幕,用于顯示豐富的表情動畫,當機器人與用戶交流時,根據語音語調、語義內容等信息,實時生成對應的開心、疑惑、思考等表情,讓用戶能直觀感受到機器人的“情緒”變化,增強人機交互的趣味性與親近感;
23、5、在機器人上增設放置框,使機器人在移動的過程中能更對物品進行搬運和移動,提高使用者的使用便捷性。
技術特征:
1.一種基于ai人工智能的泛科技信息服務機器人,包括機器人主體(1),其特征在于:所述機器人主體(1)包括硬件設備以及軟件系統,所述硬件設備包括可視化組件(2)、放置組件(3)、多傳感器融合組件(4)以及移動組件(5);
2.根據權利要求1所述的一種基于ai人工智能的泛科技信息服務機器人,其特征在于:所述可視化組件(2)用于提高使用者的交互性,所述可視化組件(2)包括立板(201)、支撐板(202)、顯示主機(203)、表情顯示屏幕(204)以及觸摸顯示屏(205),所述機器人主體(1)的一側設有立板(201),所述立板(201)的頂端設有支撐板(202),所述支撐板(202)的頂端設有顯示主機(203),所述立板(201)遠離所述機器人主體(1)的一側設有觸摸顯示屏(205),所述顯示主機(203)靠近所述觸摸顯示屏(205)的一側設有表情顯示屏幕(204);
3.根據權利要求1所述的一種基于ai人工智能的泛科技信息服務機器人,其特征在于:所述語音交互子模塊基于語音識別算法以及語音合成算法,所述手勢交互子模塊基于手勢識別算法以及手勢交互反饋算法,所述觸摸屏交互子模塊基于觸摸操作響應算法和任務進度顯示算法,所述視覺交互子模塊基于表情動畫生成算法以及知識可視化展示算法,所述微表情交互子模塊基于微表情捕捉算法、微表情識別算法和微表情交互應用算法。
4.根據權利要求3所述的一種基于ai人工智能的泛科技信息服務機器人,其特征在于:所述激光雷達采集單元基于激光發射與接收控制算法、點云數據構建算法,所述視覺攝像頭采集單元基于自動對焦與曝光控制算法、數據壓縮算法,所述熱傳感器采集單元基于溫度計算與補償算法、濾波與去噪算法、圖像重建與增強算法以及目標識別與跟蹤算法,所述超聲波傳感器采集單元基于渡越時間算法以及多次測量取平均值算法。
5.根據權利要求4所述的一種基于ai人工智能的泛科技信息服務機器人,其特征在于:所述多傳感器融合模塊中的激光雷達采集單元、視覺攝像頭采集單元、熱傳感器采集單元以及超聲波傳感器采集單元同步啟動數據采集工作。
6.根據權利要求2所述的一種基于ai人工智能的泛科技信息服務機器人,其特征在于:所述支撐板(202)設置在所述豎板(301)以及所述斜板(302)的頂端,所述支撐板(202)、豎板(301)以及斜板(302)呈三角形狀設置。
7.根據權利要求6所述的一種基于ai人工智能的泛科技信息服務機器人,其特征在于:所述豎板(301)以及斜板(302)內部設有喇叭(6),所述觸摸顯示屏(205)的側面設有麥克風(7)。
8.根據權利要求7所述的一種基于ai人工智能的泛科技信息服務機器人,其特征在于:所述放置框(304)遠離所述限位桿(303)的一側與所述斜板(302)固定連接。
9.根據權利要求7所述的一種基于ai人工智能的泛科技信息服務機器人,其特征在于:所述底座(501)以及所述放置塊(504)呈矩形設置,所述底座(501)以及所述放置塊(504)矩形四個拐角均為圓弧狀設置。
技術總結
本發明公開了一種基于AI人工智能的泛科技信息服務機器人,包括機器人主體,機器人主體包括硬件設備以及軟件系統,硬件設備包括可視化組件、放置組件、多傳感器融合組件以及移動組件;軟件系統包括多傳感器融合模塊、人機交互模塊、可視化信息顯示模塊以及處理模塊。本發明通過在機器人身上搭載高精度麥克風陣列,不僅用于語音識別,還能通過分析語音的音調、語速、音量變化等特征,判斷用戶的情緒狀態,同時,配備視覺攝像頭,引入面部表情識別技術、手勢分析技術,利用深度學習模型識別用戶的面部肌肉運動,精準判斷喜怒哀樂等情緒,實現多模態情感信息融合感知,在環境較為嘈雜時通過使用者的手勢對機器人下達指令,提高機器人的人機交互。
技術研發人員:袁振朋
受保護的技術使用者:安徽企記科技有限公司
技術研發日:
技術公布日:2025/4/6
- 還沒有人留言評論。精彩留言會獲得點贊!