一種助力機(jī)器人關(guān)節(jié)電機(jī)柔順控制方法
本發(fā)明涉及機(jī)器人關(guān)節(jié)電機(jī)控制領(lǐng)域,具體是一種助力機(jī)器人關(guān)節(jié)電機(jī)柔順控制方法。
背景技術(shù):
1、助力機(jī)器人是一種能夠增強(qiáng)人類(lèi)工作能力的機(jī)械裝置,廣泛應(yīng)用于工業(yè)、醫(yī)療和服務(wù)等領(lǐng)域。它通過(guò)動(dòng)力系統(tǒng)、傳感器與控制系統(tǒng)實(shí)現(xiàn)精準(zhǔn)操作,可協(xié)助完成重復(fù)性、繁瑣或高精度工作。助力機(jī)器人具有提高工作效率、降低人力成本和提高安全性的優(yōu)勢(shì),但也面臨技術(shù)成熟度、成本及倫理法律等方面的挑戰(zhàn)。其中外骨骼機(jī)器人是一種高度集成的生機(jī)電一體化系統(tǒng),它巧妙融合了計(jì)算機(jī)、機(jī)械工程等多領(lǐng)域技術(shù),能夠根據(jù)人體運(yùn)動(dòng)信息智能驅(qū)動(dòng)動(dòng)力系統(tǒng),實(shí)現(xiàn)信息的實(shí)時(shí)交換與感知,以及精準(zhǔn)的人機(jī)協(xié)同。這種系統(tǒng)通過(guò)為穿戴者提供運(yùn)動(dòng)輔助,顯著增強(qiáng)了人類(lèi)的物理效能,拓展了人體能力邊界。下肢外骨骼機(jī)器人作為其中的代表,廣泛應(yīng)用于軍事、醫(yī)療康復(fù)和工業(yè)等多個(gè)領(lǐng)域,不僅減輕了軍人的作戰(zhàn)負(fù)擔(dān)、提升了殘障人士的康復(fù)效果,還有效保護(hù)了工業(yè)作業(yè)人員的脊椎和腰椎健康,充分展現(xiàn)了其在增強(qiáng)人體機(jī)能、提高工作效率和保障人體安全方面的巨大潛力。
2、外骨骼機(jī)器人關(guān)節(jié)的柔順性控制能夠一邊控制外骨骼按期望的方向與位置進(jìn)行運(yùn)動(dòng),一邊根據(jù)接觸力產(chǎn)生位置的剛度,調(diào)整關(guān)節(jié)的位置增益,使外骨骼關(guān)節(jié)角度控制與力的剛度相適應(yīng)。這種控制方法能夠使外骨骼在運(yùn)動(dòng)過(guò)程中更加靈活,減少與穿戴者之間的干涉力,提高穿戴者的舒適度,進(jìn)而幫助神經(jīng)損傷或肢體殘疾的患者進(jìn)行康復(fù)訓(xùn)練,恢復(fù)運(yùn)動(dòng)機(jī)能。在康復(fù)過(guò)程中,外骨骼能夠根據(jù)患者的運(yùn)動(dòng)意圖和受力情況,提供適當(dāng)?shù)闹椭巍?/p>
3、主動(dòng)助力下肢康復(fù)外骨骼機(jī)器人是一種協(xié)助殘障患者進(jìn)行下肢康復(fù)訓(xùn)練的設(shè)備,它使用先進(jìn)的機(jī)器人技術(shù)和智能控制系統(tǒng),通過(guò)提供動(dòng)力和助力來(lái)幫助患者進(jìn)行步態(tài)訓(xùn)練和肌肉力量恢復(fù),從而提高患者的行走能力和生活質(zhì)量。目前針對(duì)外骨骼機(jī)器人的關(guān)節(jié)助力曲線的生成主要依托于人體下肢關(guān)節(jié)的生物力矩,人體在行走過(guò)程中,關(guān)節(jié)力矩在一個(gè)步態(tài)周期中也會(huì)存在著周期性的變化,使用高斯模型在線擬合助力曲線對(duì)數(shù)據(jù)分布要求較為嚴(yán)格,異常值影響明顯,計(jì)算復(fù)雜度高,因此本發(fā)明使用正弦曲線對(duì)其進(jìn)行簡(jiǎn)單的擬合,可快速得到下肢外骨骼的助力軌跡。而且傳統(tǒng)的助力策略通常需要手動(dòng)調(diào)節(jié)參數(shù)以滿足不同場(chǎng)景或運(yùn)動(dòng)狀態(tài)的需求,本發(fā)明可根據(jù)人體不同狀態(tài)自動(dòng)調(diào)整助力曲線。
4、疲勞會(huì)導(dǎo)致人體肌肉力量和耐力下降,從而增加對(duì)外骨骼機(jī)器人關(guān)節(jié)助力的需求。在疲勞狀態(tài)下,人體為了維持正常的運(yùn)動(dòng)功能,需要更多的外部支持。疲勞會(huì)改變?nèi)梭w的運(yùn)動(dòng)模式,包括關(guān)節(jié)角度、肌肉活動(dòng)方式和力量輸出等。這些變化可能導(dǎo)致外骨骼的助力效果降低,使原有的助力曲線可能不再與人體運(yùn)動(dòng)模式相匹配。疲勞還可能導(dǎo)致人體與外骨骼之間的協(xié)調(diào)性下降,使人體反應(yīng)速度和判斷能力受到影響,從而難以準(zhǔn)確地控制外骨骼的運(yùn)動(dòng)。這都將導(dǎo)致助力曲線與實(shí)際需求之間的偏差增大,甚至可能導(dǎo)致外骨骼的運(yùn)動(dòng)與人體運(yùn)動(dòng)產(chǎn)生沖突。為了確保助力效果,外骨骼的助力曲線需要能夠根據(jù)人體的疲勞狀態(tài)進(jìn)行動(dòng)態(tài)調(diào)整。
5、為了實(shí)現(xiàn)助力機(jī)器人關(guān)節(jié)電機(jī)的柔順控制,當(dāng)前下肢外骨骼助力策略的研究大多聚焦于人體正常狀態(tài),鮮少探討肌肉疲勞對(duì)助力曲線的影響。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明的目的是提供一種助力機(jī)器人關(guān)節(jié)電機(jī)柔順控制方法,包括以下步驟:
2、1)利用imu單元和足底壓力傳感器獲取人體運(yùn)動(dòng)數(shù)據(jù);
3、2)對(duì)人體運(yùn)動(dòng)數(shù)據(jù)進(jìn)行處理,預(yù)測(cè)人體當(dāng)前步態(tài)周期;
4、3)基于人體當(dāng)前步態(tài)周期,生成期望助力曲線,并以期望助力曲線的最大值作為期望助力基礎(chǔ)值;
5、4)計(jì)算肌電信號(hào)模糊增量熵;
6、5)根據(jù)肌電信號(hào)模糊增量熵確定人體疲勞階段;
7、6)基于人體疲勞階段,對(duì)期望助力基礎(chǔ)值進(jìn)行調(diào)整,生成期望助力值;
8、7)基于期望助力值,生成外骨骼機(jī)器人關(guān)節(jié)電機(jī)控制量;
9、8)基于外骨骼機(jī)器人關(guān)節(jié)電機(jī)控制量,驅(qū)動(dòng)電機(jī)進(jìn)行外骨骼機(jī)器人關(guān)節(jié)控制。
10、進(jìn)一步,所述人體運(yùn)動(dòng)數(shù)據(jù)包括足底壓力信息、人體關(guān)節(jié)的姿態(tài)角度、人體左右腿的髖關(guān)節(jié)、膝關(guān)節(jié)和踝關(guān)節(jié)的角速度、加速度。
11、進(jìn)一步,步驟1)中,獲取人體運(yùn)動(dòng)數(shù)據(jù)的步驟包括:
12、1.1)利用分別貼置于人體左右腿髖關(guān)節(jié)、膝關(guān)節(jié)和踝關(guān)節(jié)的imu單元采集各關(guān)節(jié)的角速度、加速度;利用足底壓力傳感器采集足底壓力信息;
13、1.2)利用卡爾曼濾波或互補(bǔ)濾波方法對(duì)角速度、加速度進(jìn)行處理,得到人體關(guān)節(jié)的姿態(tài)角度。
14、進(jìn)一步,一個(gè)步態(tài)周期是指下肢同一側(cè)肢體連續(xù)兩次髖關(guān)節(jié)伸展角度達(dá)到最大的時(shí)間節(jié)點(diǎn)之差。
15、進(jìn)一步,步驟2)中,預(yù)測(cè)人體當(dāng)前步態(tài)周期的步驟包括:
16、2.1)計(jì)算步態(tài)周期ti-j,即:
17、ti-j=si-j-si-j-1??(1)
18、式中,si-j為i-j步達(dá)到最大髖伸角度的時(shí)間;si-j-1為i-j-1步達(dá)到最大髖伸角度的時(shí)間;j初始值為1;
19、2.2)判斷j≥m是否成立,若否,則令j=j(luò)+1,并返回步驟2.1),若是,則進(jìn)入步驟2.3);
20、2.3)預(yù)測(cè)人體當(dāng)前步態(tài)周期ti,即:
21、ti=ω1ti-1+ω2ti-2+...+ωnti-n??(2)
22、式中,ωj為權(quán)重系數(shù);j=1,2,…,m。
23、進(jìn)一步,期望助力曲線f如下所示:
24、
25、式中,fn為期望助力曲線的最大值;to為助力開(kāi)始時(shí)間,te為助力曲線的結(jié)束時(shí)間,x為時(shí)間變量。
26、進(jìn)一步,步驟4)中,計(jì)算肌電信號(hào)模糊增量熵的步驟包括:
27、4.1)將第i個(gè)動(dòng)作信號(hào)段(肌電信號(hào)動(dòng)作活動(dòng)段)作為單獨(dú)的時(shí)間序列{u1(i):1≤i≤n1};所述第i個(gè)動(dòng)作信號(hào)段包括髖關(guān)節(jié)信息;
28、時(shí)間序列中的一個(gè)向量序列表示為,即:
29、
30、其中,u0為肌電信號(hào)幅值時(shí)間序列;
31、4.2)計(jì)算時(shí)間序列中向量序列與向量序列之間的距離即:
32、
33、4.4)計(jì)算向量序列與向量序列之間相似度即:
34、
35、式中,r=k·std(t)代表定容差值;k為大于0的常數(shù);函數(shù)std(·)代表時(shí)間序列的標(biāo)準(zhǔn)差;
36、4.5)計(jì)算函數(shù)φm(r),即:
37、
38、式中,為與之間的相似度;
39、4.6)構(gòu)建時(shí)間序列的近似熵fapen(m,r)表達(dá)式,即:
40、fapen(m,r,n)=φm(r)-φm+1(r)??(9)
41、4.7)采用高斯函數(shù)作為模糊隸屬度函數(shù)求解公式(9),得到第i個(gè)動(dòng)作信號(hào)段對(duì)應(yīng)的近似熵fi,即:
42、
43、4.8)構(gòu)建具有n-1個(gè)0值的時(shí)間序列x1,即:
44、x1={f1,0,…,0}??(11)
45、4.9)對(duì)時(shí)間序列x1估計(jì)fapen值,得出模糊增量熵序列的h1;
46、4.10)重復(fù)步驟4.1)-4.9),得到由n個(gè)模糊增量熵組成的模糊增量熵序列h1,h2,…,hn。
47、進(jìn)一步,所述人體疲勞階段包括輕微疲勞階段、中度疲勞階段和力竭階段;
48、當(dāng)模糊增量熵滿足α≤hi≤β1時(shí),人體疲勞階段為輕微疲勞階段;
49、當(dāng)模糊增量熵滿足β1≤hi≤β2時(shí),人體疲勞階段為中度疲勞階段;
50、當(dāng)模糊增量熵滿足β2≤hi≤γ時(shí),人體疲勞階段為力竭階段。
51、進(jìn)一步,當(dāng)人體疲勞階段為輕微疲勞階段時(shí),期望助力值為fn1=fn+10%fn;
52、當(dāng)人體疲勞階段為中度疲勞階段時(shí),期望助力值為fn1=fn+15%fn;
53、人體疲勞階段為力竭階段時(shí),期望助力值為fn1=fn+30%fn。
54、進(jìn)一步,步驟7)中,生成外骨骼機(jī)器人關(guān)節(jié)電機(jī)控制量的步驟包括:
55、1)獲取期望助力和外骨骼實(shí)際助力的誤差ef;
56、2)利用導(dǎo)納控制器求解誤差與位移調(diào)整量的關(guān)系方程,得到位移調(diào)整量δx,將位移調(diào)整量作為外骨骼機(jī)器人關(guān)節(jié)電機(jī)控制量;
57、誤差與位移調(diào)整量的關(guān)系方程如下所示:
58、
59、其中,m為慣性參數(shù);b為阻尼參數(shù);k為剛度參數(shù)。
60、本發(fā)明的技術(shù)效果是毋庸置疑的,本發(fā)明生成符合人體自然運(yùn)動(dòng)規(guī)律的人機(jī)系統(tǒng)期望助力曲線,確保外骨骼的助力與穿戴者的運(yùn)動(dòng)意圖保持高度一致,同時(shí)采集肌電信號(hào),并運(yùn)用模糊增量熵算法對(duì)信號(hào)進(jìn)行處理,以量化評(píng)估穿戴者的疲勞程度。
61、根據(jù)這一評(píng)估結(jié)果,將整個(gè)疲勞過(guò)程科學(xué)地劃分為三種不同的疲勞程度類(lèi)別。這一分類(lèi)有助于在外骨骼機(jī)器人控制過(guò)程中,針對(duì)不同疲勞階段提供精準(zhǔn)的補(bǔ)償信號(hào),從而優(yōu)化助力效果,達(dá)到更好的人機(jī)協(xié)同目的。最后,基于上述的步態(tài)周期預(yù)測(cè)、疲勞程度評(píng)估以及期望助力曲線的生成,本發(fā)明會(huì)根據(jù)不同的助力需求,向驅(qū)動(dòng)器發(fā)送相應(yīng)的控制信號(hào),驅(qū)動(dòng)電機(jī)進(jìn)行精確的外骨骼控制。這一過(guò)程不僅確保了外骨骼機(jī)器人關(guān)節(jié)的助力效果與穿戴者的實(shí)際需求相匹配,還通過(guò)靈活的調(diào)整策略,實(shí)現(xiàn)了助力機(jī)器人關(guān)節(jié)的柔順控制,極大地提升了穿戴者的舒適度和使用體驗(yàn)。
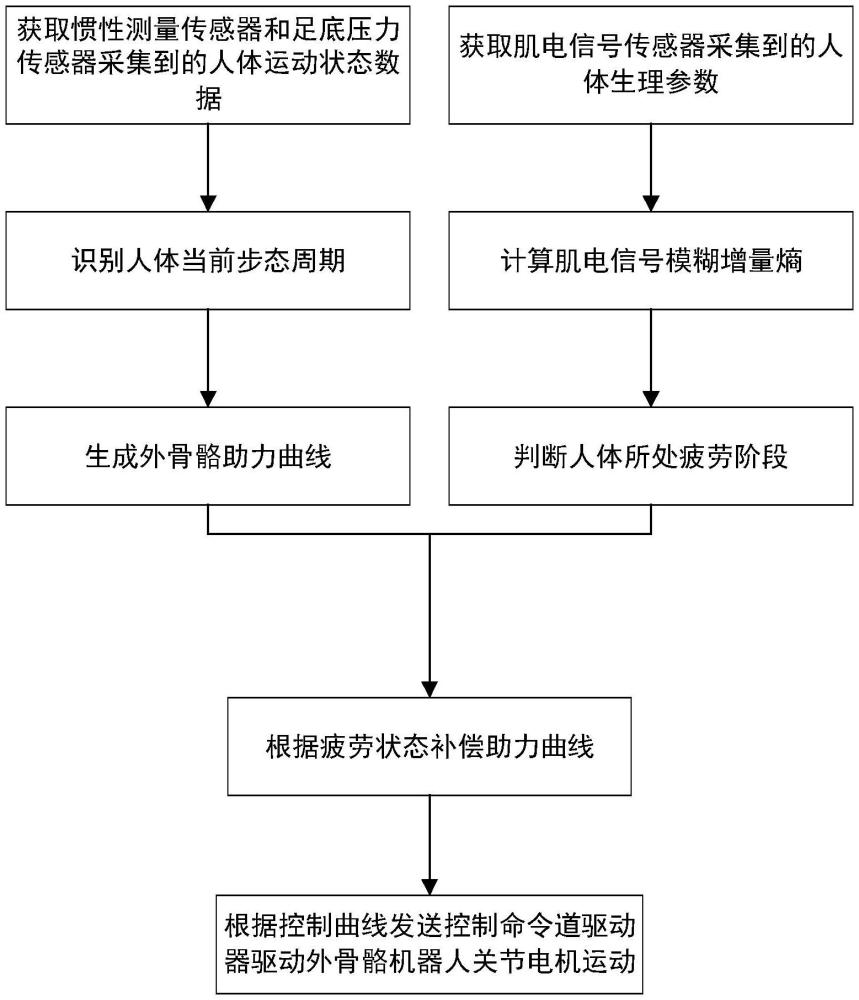
62、本發(fā)明通過(guò)獲取慣性測(cè)量傳感器和足底壓力傳感器采集到的人體運(yùn)動(dòng)狀態(tài)數(shù)據(jù),包括左右腿髖關(guān)節(jié)、膝關(guān)節(jié)和踝關(guān)節(jié)的加速度、角速度數(shù)值和足底壓力信息,識(shí)別人體當(dāng)前步態(tài)周期的運(yùn)動(dòng)意圖,包括步態(tài)事件識(shí)別、步態(tài)周期劃分和步態(tài)周期預(yù)測(cè),進(jìn)而生成外骨骼機(jī)器人關(guān)節(jié)電機(jī)助力曲線。同時(shí)采集人體肌電信號(hào),通過(guò)計(jì)算其模糊增量熵識(shí)別當(dāng)前肌肉所處的疲勞狀態(tài),選擇相應(yīng)的助力模式,調(diào)整原始的助力值,最后根據(jù)不同的助力模式發(fā)送控制信號(hào)到驅(qū)動(dòng)器驅(qū)動(dòng)電機(jī)進(jìn)行外骨骼控制,實(shí)現(xiàn)機(jī)器人關(guān)節(jié)電機(jī)的柔順控制。
63、本發(fā)明中對(duì)外骨骼機(jī)器人關(guān)節(jié)電機(jī)助力曲線的生成采用使用imu和足底壓力傳感器來(lái)識(shí)別步態(tài)周期,通過(guò)分析周期內(nèi)的角度變化和力矩變化,確定了助力機(jī)器人電機(jī)的助力時(shí)機(jī)和助力大小,通過(guò)正弦函數(shù)擬合生成了期望的助力曲線。精確的助力時(shí)機(jī)和大小可以減少人體在運(yùn)動(dòng)過(guò)程中的沖擊和震動(dòng),從而降低運(yùn)動(dòng)損傷的風(fēng)險(xiǎn)。特別是在步態(tài)轉(zhuǎn)換等關(guān)鍵階段,合適的助力可以有效緩解關(guān)節(jié)和肌肉的負(fù)擔(dān)。該發(fā)明能夠較好地解決人機(jī)之間的交互力,提高了人機(jī)協(xié)同性。
64、本發(fā)明中對(duì)人體肌肉疲勞狀態(tài)的識(shí)別采用基于模糊增量熵的疲勞表征算法,能夠?qū)ζ陔A段進(jìn)行客觀有效的劃分,以便于在外骨骼機(jī)器人電機(jī)控制中根據(jù)不同疲勞階段提供相應(yīng)的補(bǔ)償信號(hào),以更好地達(dá)到柔順控制和人機(jī)融合的目的。
65、本發(fā)明提出的助力機(jī)器人關(guān)節(jié)電機(jī)柔順控制方法,在生成基本助力曲線和精準(zhǔn)識(shí)別人體疲勞階段基礎(chǔ)上,為外骨骼電機(jī)提供了符合人體運(yùn)動(dòng)意圖的助力曲線,減少了人體運(yùn)動(dòng)消耗,消除了人機(jī)不匹配導(dǎo)致的安全隱患,提高了關(guān)節(jié)柔順性,具有更好的助力效果和安全性。
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!