基于掃描測量的機器人快換盤快速智能示教系統及示教方法與流程
本發明涉及機器人快換盤自動示教系統,尤其涉及一種基于掃描測量的機器人快換盤快速智能示教系統及示教方法。
背景技術:
1、快換盤作為多品種混線生產線自動化產線工具切換關鍵零件,廣泛應用于汽車焊裝生產線焊槍工位焊槍和焊裝夾具等多任務切換中,通常以工位配備的工作站機器人作為運動執行機構,末端快換盤包含子母盤(r側、t側)兩個部分,分別包含機械對接鎖緊機構和電氣液接口,母盤(r側)為公用部分,與機器人末端法蘭連接;子盤(t側)為工作部件,對應多任務的工裝夾具、焊槍、擰緊槍等執行部件;工作時,工作站機器人帶動快換盤母盤與各任務工作部件配備的子盤對接,通過快換母盤和子盤的孔銷配合的機械對接進行子母盤連接初定位,再通過鎖緊機構實現可靠連接,進而保證電氣接口的精確配合,實現工作部件的電氣連接。其關鍵是如何快速規劃多任務工作站機器人的運行軌跡、完成機器人末端r側和t側兩端子母盤的精準對接,進而保證多任務切換過程中快換子盤和母盤的對接精度,以減小多任務切換過程中,由于工作部在停放站上浮動定位偏差導致的擠壓、碰撞乃至對接失效。
2、當前,汽車焊裝生產線機器人示教還依賴人工現場目視輔助的手持示教模式,示教時間長、工作量大,而且由于采用目視示教方法,示教軌跡精度低;此外,由于人工、環境等不確定因素的影響,導致不同示教對接精度一致性較差。
技術實現思路
1、本發明的目的在于克服現有技術的不足,提供了一種基于掃描測量的機器人快換盤快速智能示教系統及示教方法。
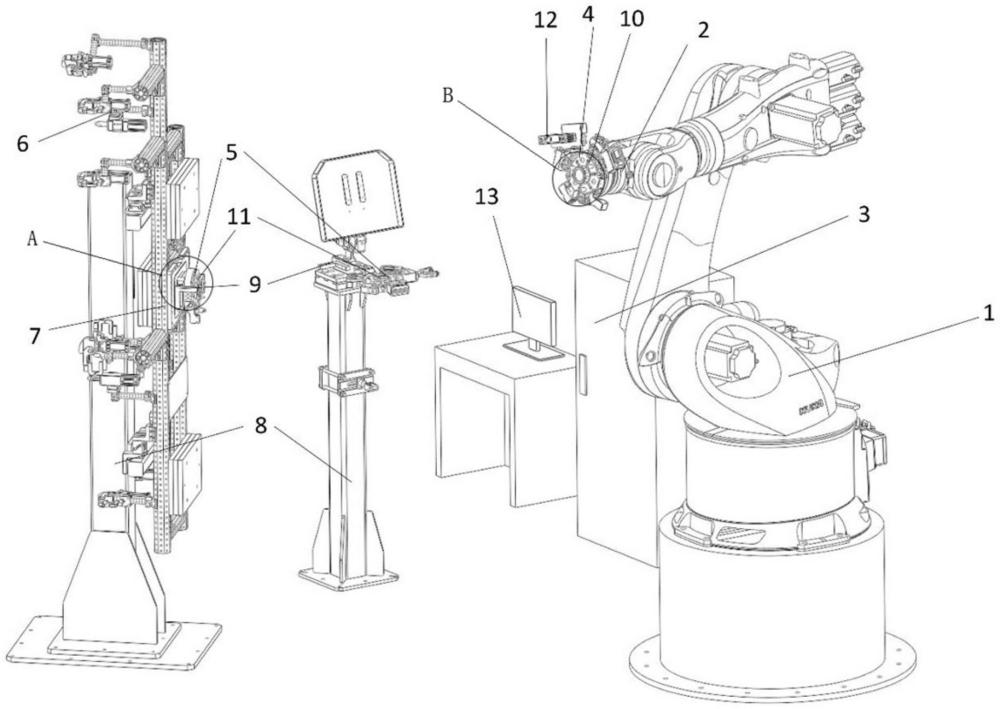
2、為實現上述發明目的,本發明提供一種基于掃描測量的機器人快換盤快速智能示教系統,其特征在于,包括工作站機器人模塊、設置在工作站機器人模塊一側的工作站停放架和中央ecu端;所述工作站機器人模塊包括第一控制器和機械臂,所述機械臂末端設有法蘭盤,所述法蘭盤上連接有快換盤母盤及激光掃描模塊,所述激光掃描模塊包括第二控制器和激光掃描測頭;所述工作站停放架包括停放支架,所述停放支架朝向工作站機器人一側置有若干具有快換盤子盤的工作端執行部件;所述中央ecu端分別與第一控制器、第二控制器相連,分別實現對工作站機器人模塊以及激光掃描模塊的控制。
3、優選地,所述停放支架上靠近所述工作端執行部件處還固定有標定塊,所述標定塊用于對快換盤子盤的測量點云進行標定。
4、優選地,所述工作端執行部件通過工裝夾具連接快換盤子盤,且所述工裝夾具停放站支架上以實現工作端執行部件的定位存儲。
5、優選地,所述快換盤母盤上設有導向銷,所述快換盤子盤上設有對應導向孔。
6、優選地,所述中央ecu端包括上位機系統和人機交互界面。
7、本發明還提供一種基于掃描測量的機器人快換盤快速智能示教系統的示教方法,其特征在于,包括以下步驟:
8、步驟一、將激光掃描模塊掃描得到的包含標定塊和快換盤子盤表面的測量點云轉換為以機器人工作坐標系表達的點云,以作為快換盤母盤和子盤對接軌跡規劃的基準坐標系;
9、步驟二、通過標定塊點云與快換盤子盤表面點云計算獲得局部坐標系轉換矩陣,然后結合測量點云到機器人工作坐標系的變換矩陣,將測量的快換盤子盤點云原點轉換至以機器人工作坐標系表達的位姿,并通過對測量獲得的快換盤子盤點云進行轉化,獲得相對理論標定塊的快換盤子盤和母盤對接的運動軌跡的實際偏轉矩陣,從而確定機器人工作坐標系表達的快換盤子盤對接特征矢量及位置信息;
10、步驟三,規劃快換盤對接軌跡,以轉換的標定塊測量點云為基準,計算快換盤母盤中心相對測量的快換盤子盤對應對接特征的運動軌跡,由中央ecu端生成相應的機器人控制程序,進而控制工作站機器人完成快換盤子母盤的對接動作。
11、優選地,激光掃描模塊掃描得到的包含標定塊和快換盤子盤表面的測量點云的過程包括以下子步驟:
12、測量前:首先將待取用的工作端執行部件停放至工作站停放架的停放支架上,并調整標定塊使其與工作端執行部件相連的快換盤子盤位于激光掃描測頭測量的同一視場內;然后,以快換盤子盤導向孔位與激光掃描測頭測量視場為基準,以此初始定位關系為基礎設計掃描測量路徑;掃描策略設計,以標定塊和末端快換盤子盤處于同一測量數據設計掃描軌跡起始點和終止點;
13、測量執行:測量時采用工作站機器人與激光掃描測頭聯動控制的方式進行掃描測量,首先,工作站機器人帶動激光掃描測頭運動到測量起始點,中央ecu端與第二控制器通信,控制激光掃描測頭數據傳輸啟動;然后工作站機器人帶動激光掃描測頭以定速運動方式完成對快換盤子盤的掃描測量,從而獲得包含標定塊和快換盤子盤表面的點云數據集{{b0}0~l,{b子盤}0~l}。
14、優選地,所述步驟一具體包括:設計以工作坐標系表達的標準標定塊cad模型,并生成標準標定塊cad模型提取的點云{{q0}0~l};然后,將測量的標定塊點云{{b0}0~l}與cad模型提取的點云{{q0}0~l}的點云進行匹配,獲得cad模型到測量點云的變換矩陣t測→cad,即測量點云到機器人工作坐標系的變換矩陣,由此,將激光掃描測頭測量的點云數據轉換為以機器人工作坐標系表達的點云,記為{{b0}0~l,{b子盤}0~l}cad=t測→cad{{b0}0~l,{b子盤}0~l}。
15、優選地,所述步驟二中局部坐標系轉換矩陣的獲得包括以下子步驟:
16、通過標定塊定位點云進行快換盤子盤表面定位特征的位置信息提取,首先,通過中央ecu端的上位機系統的人機交互界面,選取標定塊點云{{b0}0~l},提取其表面定位特征和坐標原點;然后,通過中央ecu端的上位機系統的人機交互界面,選取快換盤子盤表面點云{{b子盤}0~l},分別提取表面特征法矢量以及子盤導向孔特征的坐標信息;標定塊點云{{b0}0~l}與快換盤子盤表面點云{{b子盤}0~l}相對位置計算,進而獲得二者局部坐標系轉換矩陣,記為t0→子盤。
17、與現有技術相比,本發明的有益效果是:
18、1、本發明提出基于掃描測量的機器人快換盤快速智能示教系統,通過集成機器人末端母盤上的激光掃描在位測量,識別停放站工作端快換盤子盤的定位特征信息,可準確提取目標匹配特征的端面法矢量及定位孔特征的位置信息,避免人工目視示教的非精確定位對接,可有效提高快換盤子母盤對接的精度和可靠性;
19、2、本發明提出通過標定塊進行待對接工作端快換盤子盤的位置識別,解決了手眼標定過程中機器人的運動精度影響,可有效提高末端快換盤對接精度;通過對末端快換盤子盤位置的識別,進而自動生成機器人對接軌跡及相應的執行程序,在提高快換盤對接精度的基礎上,可以大大提高人工示教效率。
技術特征:
1.一種基于掃描測量的機器人快換盤快速智能示教系統,其特征在于,包括工作站機器人模塊、設置在工作站機器人模塊一側的工作站停放架和中央ecu端;所述工作站機器人模塊包括第一控制器和機械臂,所述機械臂末端設有法蘭盤,所述法蘭盤上連接有快換盤母盤及激光掃描模塊,所述激光掃描模塊包括第二控制器和激光掃描測頭;所述工作站停放架包括停放支架,所述停放支架朝向工作站機器人一側置有若干具有快換盤子盤的工作端執行部件;所述中央ecu端分別與第一控制器、第二控制器相連,分別實現對工作站機器人模塊以及激光掃描模塊的控制。
2.根據權利要求1所述的一種基于掃描測量的機器人快換盤快速智能示教系統,其特征在于,所述停放支架上靠近所述工作端執行部件處還固定有標定塊,所述標定塊用于對快換盤子盤的測量點云進行標定。
3.根據權利要求1或2所述的一種基于掃描測量的機器人快換盤快速智能示教系統,其特征在于,所述工作端執行部件通過工裝夾具連接快換盤子盤,且所述工裝夾具停放站支架上以實現工作端執行部件的定位存儲。
4.根據權利要求1或2所述的一種基于掃描測量的機器人快換盤快速智能示教系統,其特征在于,所述快換盤母盤上設有導向銷,所述快換盤子盤上設有對應導向孔。
5.根據權利要求1或2所述的一種基于掃描測量的機器人快換盤快速智能示教系統,其特征在于,所述中央ecu端包括上位機系統和人機交互界面。
6.一種基于掃描測量的機器人快換盤快速智能示教系統的示教方法,其特征在于,包括以下步驟:
7.根據權利要求6所述的一種基于掃描測量的機器人快換盤快速智能示教系統的示教方法,其特征在于,激光掃描模塊掃描得到的包含標定塊和快換盤子盤表面的測量點云的過程包括以下子步驟:
8.根據權利要求7所述的一種基于掃描測量的機器人快換盤快速智能示教系統的示教方法,其特征在于,所述步驟一具體包括:設計以工作坐標系表達的標準標定塊cad模型,并生成標準標定塊cad模型提取的點云{{q0}0~l};然后,將測量的標定塊點云{{b0}0~l}與cad模型提取的點云{{q0}0~l}的點云進行匹配,獲得cad模型到測量點云的變換矩陣t測→cad,即測量點云到機器人工作坐標系的變換矩陣,由此,將激光掃描測頭測量的點云數據轉換為以機器人工作坐標系表達的點云,記為{{b0}0~l,{b子盤}0~l}cad=t測→cad{{b0}0~l,{b子盤}0~l}。
9.根據權利要求7或8所述的一種基于掃描測量的機器人快換盤快速智能示教系統的示教方法,其特征在于,所述步驟二中局部坐標系轉換矩陣的獲得包括以下子步驟:
技術總結
本發明公開了一種基于掃描測量的機器人快換盤快速智能示教系統及示教方法,屬于機器人快換盤自動示教系統領域。本發明通過在母盤上設置聯動的激光掃描模塊,實現對子盤盤面和特征的精度測量,并通過測量的目標盤面點云構造出精準的盤面對接特征幾何形貌和位置信息,結合交互式的智能特征識別算法確定不同姿態下的目標盤面幾何特征,自適應的完成機器人R側母盤和工作站T側子盤精準對接。本發明可實現合理規劃機器人軌跡、保證機器人尋位精度,解決人工示教效率低、精度不穩定、易磨損的問題,提升末端執行器對接精度和穩定性、降低磨損損耗。
技術研發人員:潘鵬勝,劉順,劉棟,顧群飛,劉繆根,李奧南,劉靖豪,張俊磊,尹朝新
受保護的技術使用者:上海橋田智能設備有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!