一種AI智能型教育機器人
本發明涉及機器人,具體而言,涉及一種ai智能型教育機器人。
背景技術:
1、教育機器人是由生產廠商專門開發而用來激發學生學習興趣和培養學生綜合能力為目標的機器人成品、套裝或散件。
2、經檢索,中國發明專利cn117351816b公開了一種教育機器人,屬于操縱裝置技術領域,包括底座以及底座上方的機器人本體,底座的外側彈性連接有多個第一支桿,第一支桿的外側轉動套設有套筒,且套筒內部位于第一支桿的下方設置有滑桿,滑桿的底端安裝有支撐輪,所述底座處設置有連接帶;通過設置的連接帶一方面有利于調節第一支桿相對于底座的位置,從而提高底座移動的穩定性,另一方面,利用連接帶能夠提高設備整體的避開障礙物的能力,此外,當支撐輪卡入坑洞處時,利用連接帶能夠帶動套筒旋轉,從而帶動滑桿向上移動使得支撐輪移出坑洞,有利于裝置整體的正常行駛,實際使用時,連接帶采用塑料或者纖維等材料制成。
3、上述裝置通過連接帶配合滑桿來使支撐輪離開坑洞,但這種方式對于支撐面積的調整較為簡單和局限,當支撐輪卡入坑洞時,僅依靠連接帶帶動套筒旋轉使滑桿向上移動讓支撐輪移出坑洞,這種方式對于較大或較復雜的凹坑可能效果不佳,在應對復雜環境和任務時的能力有限,難以滿足多樣化的教育應用場景需求。
4、如何發明一種ai智能型教育機器人來解決這些問題,成為了本領域技術人員亟待解決的問題。
技術實現思路
1、為了彌補以上不足,本發明提供了一種ai智能型教育機器人,旨在解決上述背景中所提到的問題。
2、本發明是這樣實現的:
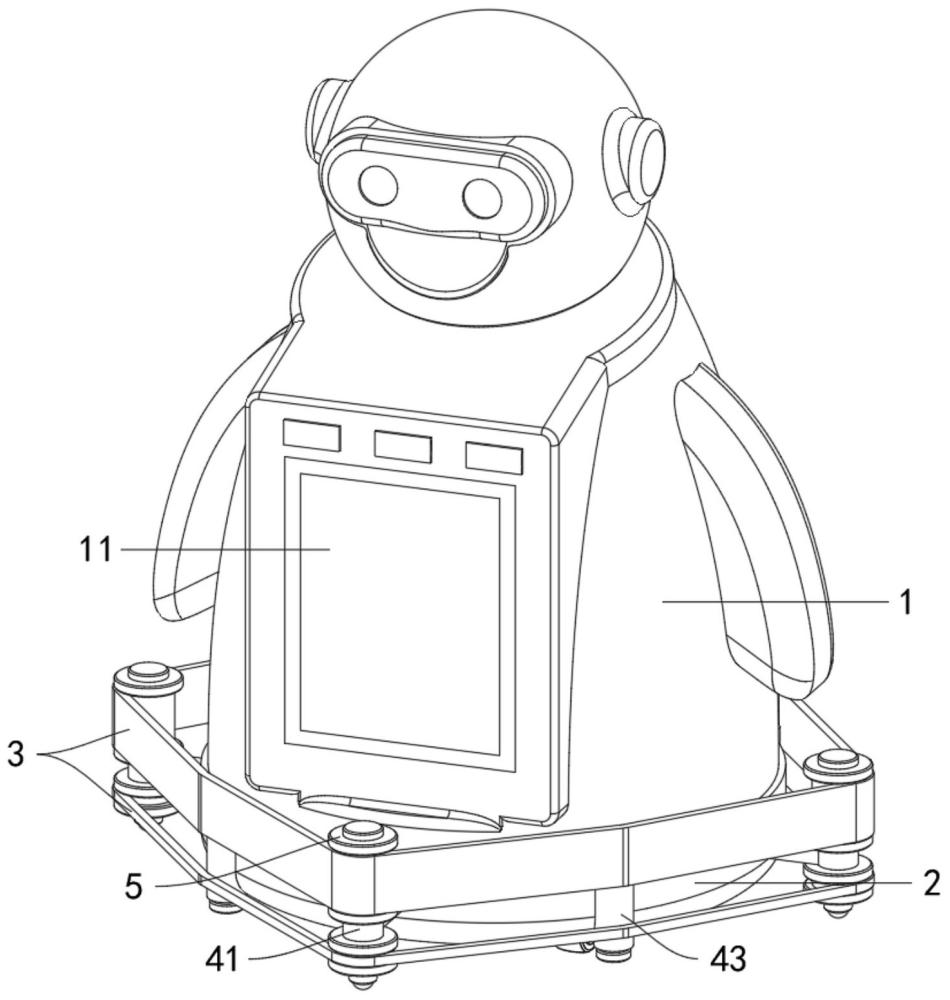
3、本發明提供一種ai智能型教育機器人,包括機器人本體和機器人本體底部設置的底盤,所述底盤的底部設有電動輪,所述電動輪基座的上方連接有轉臺,所述機器人本體的前側設置有顯示屏,還包括:
4、移動支撐組件:所述移動支撐組件設置于底盤上;
5、感應頂升組件:所述感應頂升組件設置于機器人本體和底盤內。
6、優選的,所述底盤的邊緣對稱安裝有支撐桿,所述支撐桿用于對底盤進行支撐固定。
7、優選的,所述移動支撐組件包括彈性繃帶、滑塊、轉輪和電機,所述滑塊的一端連接有固定筒,所述電機安裝在機器人本體的底部,所述底盤的內部設有多個與滑塊相匹配的滑槽,位于滑槽內部的所述滑塊的端部與滑槽之間通過彈簧一彈性連接,所述固定筒的內部設有滑動腔,所述滑動腔的頂部安裝有電磁鐵和彈簧二,所述彈簧二的下端連接有磁筒,所述磁筒與滑動腔之間滑動連接,所述磁筒的下端轉動卡接有滾球。
8、優選的,所述電機的輸出端連接有卡盤,所述底盤的內部設有與卡盤相匹配的安裝腔,位于滑槽內部的所述滑塊的端部還連接有連接繩和距離傳感器,所述連接繩和距離傳感器均位于固定筒的內側,所述底盤的內部設有與連接繩相匹配的通路,所述連接繩的一端穿過該通路后延伸至安裝腔內,并卡接安裝在卡盤上。
9、優選的,所述固定筒的外側轉動卡接有兩個轉輪,兩個所述轉輪分別分布在滑塊的上、下側,同一平面上的所述轉輪之間通過彈性繃帶傳動連接。
10、優選的,多個所述滑槽繞底盤的中軸線呈環形等距分布,靠近安裝腔的所述通路的端部為倒圓角設置,所述固定筒的下端與底盤的底部齊平,電磁鐵通電時的所述電磁鐵與磁筒的相對面為不同極磁性設置,所述距離傳感器、電機與電磁鐵電性連接。
11、優選的,安裝后的所述彈性繃帶截面輪廓大于底盤的截面輪廓。
12、優選的,所述感應頂升組件包括機器人本體內安裝的數個液壓缸,所述液壓缸的數量與電動輪的數量相等,所述液壓缸的輸出端貫穿底盤的頂壁,并與轉臺的頂部固定連接,所述液壓缸與距離傳感器電性連接。
13、本發明的有益效果是:
14、借助電機、卡盤、連接繩、滑塊和彈簧等部件的配合,機器人能根據不同地形靈活改變底盤的支撐面積,在平坦道路上,縮小支撐面積使機器人在狹窄空間和轉向時更靈活;在不平整地面,增大支撐面積可分散重量,提高穩定性,防止側翻和顛簸;遇到凹坑時,移動支撐組件會先進行調整,如提起滾球避免卡住,縮小支撐面積減少碰撞風險,若仍無法脫離,感應頂升組件啟動,通過液壓缸增加底盤高度,為跨越凹坑提供更充足空間,改善受力分布,提高跨越的穩定性和成功率,兩種組件相互配合,形成多層次的地形適應機制,在實際教育應用場景中,機器人可能會在教室、走廊、戶外等多種環境下移動,通過靈活調整支撐面積和高度,它能夠更好地適應不同環境,確保教學任務的順利進行,為用戶提供更可靠的服務,拓寬了機器人的使用場景。
15、磁筒下端的滾球在機器人移動過程中起到輔助支撐的作用,尤其是在轉彎或經過不平整地面時,能減少電動輪所承受的壓力,增強機器人的穩定性,彈性繃帶環繞在機器人外側,其截面輪廓大于底盤,能率先接觸外物,利用彈性特性緩沖沖擊力,吸收能量,保護機器人內部精密部件和外殼,同時避免異物進入影響正常運行,距離傳感器實時監測滑塊位置信息,當遇到異常情況時,能自動將信號傳遞給電磁鐵、電機和液壓缸等部件,控制它們做出相應動作,實現機器人對不同地形和障礙的智能判斷和自動調整,減少人工干預,提高自主運行能力和工作效率。
技術特征:
1.一種ai智能型教育機器人,包括機器人本體(1)和機器人本體(1)底部設置的底盤(2),所述底盤(2)的底部設有電動輪(92),所述電動輪(92)基座的上方連接有轉臺(91),所述機器人本體(1)的前側設置有顯示屏(11),其特征在于,還包括:
2.根據權利要求1所述的一種ai智能型教育機器人,其特征在于,所述底盤(2)的邊緣對稱安裝有支撐桿(43),所述支撐桿(43)用于對底盤(2)進行支撐固定。
3.根據權利要求1所述的一種ai智能型教育機器人,其特征在于,所述移動支撐組件包括彈性繃帶(3)、滑塊(4)、轉輪(5)和電機(8),所述滑塊(4)的一端連接有固定筒(41),所述電機(8)安裝在機器人本體(1)的底部,所述底盤(2)的內部設有多個與滑塊(4)相匹配的滑槽(22),位于滑槽(22)內部的所述滑塊(4)的端部與滑槽(22)之間通過彈簧一(42)彈性連接,所述固定筒(41)的內部設有滑動腔(411),所述滑動腔(411)的頂部安裝有電磁鐵(413)和彈簧二(412),所述彈簧二(412)的下端連接有磁筒(414),所述磁筒(414)與滑動腔(411)之間滑動連接,所述磁筒(414)的下端轉動卡接有滾球(415)。
4.根據權利要求3所述的一種ai智能型教育機器人,其特征在于,所述電機(8)的輸出端連接有卡盤(81),所述底盤(2)的內部設有與卡盤(81)相匹配的安裝腔(21),位于滑槽(22)內部的所述滑塊(4)的端部還連接有連接繩(6)和距離傳感器(7),所述連接繩(6)和距離傳感器(7)均位于固定筒(41)的內側,所述底盤(2)的內部設有與連接繩(6)相匹配的通路,所述連接繩(6)的一端穿過該通路后延伸至安裝腔(21)內,并卡接安裝在卡盤(81)上。
5.根據權利要求3所述的一種ai智能型教育機器人,其特征在于,所述固定筒(41)的外側轉動卡接有兩個轉輪(5),兩個所述轉輪(5)分別分布在滑塊(4)的上、下側,同一平面上的所述轉輪(5)之間通過彈性繃帶(3)傳動連接。
6.根據權利要求4所述的一種ai智能型教育機器人,其特征在于,多個所述滑槽(22)繞底盤(2)的中軸線呈環形等距分布,靠近安裝腔(21)的所述通路的端部為倒圓角設置,所述固定筒(41)的下端與底盤(2)的底部齊平,電磁鐵(413)通電時的所述電磁鐵(413)與磁筒(414)的相對面為不同極磁性設置,所述距離傳感器(7)、電機(8)與電磁鐵(413)電性連接。
7.根據權利要求5所述的一種ai智能型教育機器人,其特征在于,安裝后的所述彈性繃帶(3)截面輪廓大于底盤(2)的截面輪廓。
8.根據權利要求4所述的一種ai智能型教育機器人,其特征在于,所述感應頂升組件包括機器人本體(1)內安裝的數個液壓缸(9),所述液壓缸(9)的數量與電動輪(92)的數量相等,所述液壓缸(9)的輸出端貫穿底盤(2)的頂壁,并與轉臺(91)的頂部固定連接,所述液壓缸(9)與距離傳感器(7)電性連接。
技術總結
本發明提供了一種AI智能型教育機器人,屬于機器人技術領域,該發明包括機器人本體和機器人本體底部設置的底盤,所述底盤的底部設有電動輪,所述電動輪基座的上方連接有轉臺,還包括:移動支撐組件,感應頂升組件;借助電機、卡盤、連接繩等部件的配合,機器人能根據不同地形靈活改變底盤的支撐面積,在平坦道路上,縮小支撐面積使機器人在狹窄空間和轉向時更靈活;在不平整地面,增大支撐面積可分散重量,提高穩定性,防止側翻和顛簸;遇到凹坑時,移動支撐組件會先進行調整,若仍無法脫離,感應頂升組件啟動,通過液壓缸增加底盤高度,為跨越凹坑提供更充足空間,提高跨越的穩定性和成功率,兩種組件相互配合,形成多層次的地形適應機制。
技術研發人員:馬小琴,王成寶,趙盼,陸克中,張欽禮,柯萬超,張百順,朱玉榮,湯鵬飛
受保護的技術使用者:池州學院
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!