一種智能工廠用自動抓取轉運車
本發明涉及轉運車,尤其是涉及一種智能工廠用自動抓取轉運車。
背景技術:
1、塑料周轉箱是一種由聚丙烯、聚乙烯等制成的可重復使用的物流容器,廣泛應用于物流、制造、倉儲、醫療等多個領域;用于盛放食品、工業產品等,具有清潔方便,零件周轉便捷、堆放整齊,便于管理等優點。
2、在智能工廠中,塑料周轉箱通常采用自動抓取轉運車進行轉運,以降低人工勞動強度,提高搬運效率;在自動抓取轉運車搬運過程中,轉運車中的夾板夾持在塑料周轉箱中的外壁,將塑料周轉箱轉運至目的地;但金屬材料的夾板施加夾持力時,如果力度過大或夾持方式不當,對塑料周轉箱造成擠壓,導致周轉箱損壞或箱內產品損壞;為了解決金屬材質夾板對周轉箱的損傷,部分夾板采用柔性的橡膠制成,橡膠具有高彈性和適用性,但長期的使用中橡膠疲勞性降低,導致夾持力變弱,夾持的穩定性差,周轉箱在搬運過程中向下滑落或偏沉的情況出現,嚴重時周轉箱掉落等風險,橡膠疲勞性降低可通過更換橡膠或增加夾持力來解決周轉箱滑落、偏沉的問題,該更換維護方式增加了勞動力和維護成本,夾持力的調整需實時觀察實時調整,費事費力、操作繁瑣等問題。
3、因此,本發明提供了一種智能工廠用自動抓取轉運車,以解決上述背景技術中提出的問題。
技術實現思路
1、本發明的目的在于提供一種智能工廠用自動抓取轉運車,解決現有抓取轉運車中金屬材料的夾板,易造成塑料周轉箱變形,損壞塑料周轉箱內的產品,具有柔性的橡膠夾板在長期的使用中橡膠疲疲勞性降低、導致夾持力變弱,夾持的穩定性差,造成周轉箱滑落、偏沉和掉落風險,而更換橡膠夾板,作業人員費事費力、操作繁瑣,增加了勞動力和維護成本等問題。
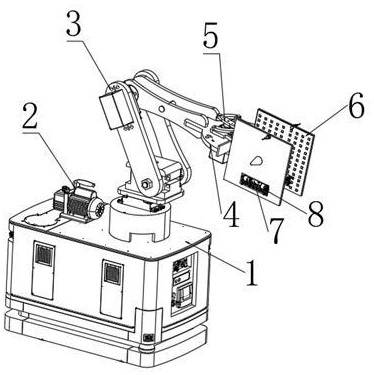
2、為解決上述技術問題,本發明提供一種智能工廠用自動抓取轉運車,包括轉運車車體,轉運車車體頂面設置機械臂和電動氣泵,機械臂的末端卡接水平的支撐板,支撐板上設置驅動裝置,驅動裝置的兩端分別設置豎直的夾板組件;兩夾板組件相對面的氣囊層分別抵貼于塑料周轉箱兩側壁,對塑料周轉箱夾持轉運;夾板組件的下部設置方形孔,方形孔內設置滾動機構,滾動機構用于防止夾板組件發生故障,在夾持塑料周轉箱過程中,塑料周轉箱向下掉落。
3、本發明技術方案的進一步改進在于:支撐板本體包括卡接于機械臂末端水平的異形板,異形板的外端設置豎直的限位板。
4、本發明技術方案的進一步改進在于:驅動裝置包括異形板中部底面設置的第一旋轉電機,第一旋轉電機的輸出軸連接減速機,減速機貫穿異形板,減速機的輸出軸固定連接旋轉塊的中部,旋轉塊的兩端分別固定連接第一連接軸,第一連接軸轉動連接弧形的推動塊,推動塊的端部轉動連接第二連接軸,第二連接軸固定連接豎直的夾板組件。
5、本發明技術方案的進一步改進在于:夾板組件中靠近支撐板的側端面的中部設置限位件,限位件中水平的桿部固定連接第二連接軸,限位件本體下部的桿部設置限位槽,限位槽內適配套裝限位板。
6、本發明技術方案的進一步改進在于:夾板組件還包括與限位件固定連接的夾板層,夾板層內側壁抵貼設置氣囊層,氣囊層本體的側壁上均勻設置若干個凸塊,凸塊抵貼塑料周轉箱的側壁。
7、本發明技術方案的進一步改進在于:夾板層的外側壁設置進氣管,進氣管為喇叭形狀,進氣管的大的開口處貫穿夾板層并與氣囊層連通連接,進氣管的小的開口處通過軟管與電動氣泵連接。
8、本發明技術方案的進一步改進在于:兩夾板組件的相對的內側壁上邊緣均設置位移傳感器,兩個位移傳感器發射信號位置低于塑料周轉箱頂面至少1毫米。
9、本發明技術方案的進一步改進在于:滾動機構包括固定于方形孔頂面的頂板,頂板兩端分別設置豎直的豎板,豎板底面固定于方形孔的底面,豎板的內側面固定第二旋轉電機,第二旋轉電機輸出軸貫穿豎板,并在端部套裝主動輪。
10、本發明技術方案的進一步改進在于:滾動機構還包括兩豎板之間位于第二旋轉電機的斜下方設置轉動軸,轉動軸上均勻套裝若干個轉動輪,轉動輪的外圈面均勻設置若干條防滑條;防滑條與塑料周轉箱抵貼接觸。
11、本發明技術方案的進一步改進在于:兩豎板的下部設置軸承,軸承套裝轉動軸的兩端,轉動軸的兩端延伸出軸承,并在端部套裝從動輪,從動輪與主動輪外周套裝皮帶傳動;從動輪直徑大于主動輪的直徑。
12、采用上述技術方案,本發明具有如下有益效果:
13、1、本發明提供的一種智能工廠用自動抓取轉運車,通過夾板組件與塑料周轉箱側壁形成柔性接觸,減少塑料周轉箱在夾持轉運中變形以及損壞塑料周轉箱內的產品,提高了夾持轉運的質量,具體地說,夾板組件中的夾板層提供剛性的夾持力,夾板層抵貼設置的氣囊層膨脹產生均勻的柔性夾持力,與塑料周轉箱側面形成柔性接觸,減少夾板組件對塑料周轉箱夾持時產生變形,實現無痕、無損夾取或搬運,降低了對塑料周轉箱造成損傷的風險,另外,氣囊層的膨脹產生均勻的夾持力,提高了夾持的穩定性。
14、2、本發明提供的一種智能工廠用自動抓取轉運車,通過滾動裝置能夠有效的避免塑料周轉箱在夾持搬運過程中向下滑落或偏沉,甚至出現周轉箱掉落等風險,提高了轉運車夾持搬運過程中的安全性和夾持轉運的穩定性,具體地說,滾動機構中的第二旋轉電機帶動主動輪轉動,主動輪通過皮帶傳動帶動從動輪轉動,從動輪帶動轉動軸轉動,轉動軸帶動轉動輪向塑料周轉箱向上移動的方向移動,使周裝箱向上移動,不再向下掉落;使轉運車中的夾板組件夾持的塑料周轉箱轉運至目的地,防止塑料周轉箱在夾持過程中,向下掉落,造成塑料周轉箱和周裝箱內的物體損壞,提高夾持過程中的安全性。
15、3、本發明提供的一種智能工廠用自動抓取轉運車,驅動裝置中的第一旋轉電機連接減速機,將第一旋轉電機的高轉速轉變低轉速,防止夾板在夾持時運動過快產生位置上的反彈,造成夾板的位置定位不精準,夾板對塑料周轉箱夾持的牢固性差;通過設置第一旋轉電機連接減速機,減少夾持時運動過快產生反彈,提高夾持的精度,另外,減速機能夠將電機的扭矩放大,提高夾板的夾持力,進而提高夾緊效果。
16、4、本發明提供的一種智能工廠用自動抓取轉運車,通過驅動裝置中弧形的推動塊,帶動限位件移動,相對于水平的直行程的夾持機構,增加了夾板組件之間的夾持的距離,適應不同尺寸的塑料周轉箱。
17、5、本發明提供的一種智能工廠用自動抓取轉運車,夾板組件側面靠近支撐板的側端面的中部設置限位件,限位件中的限位槽適配套裝限位板,使夾板組件在張開和夾持時能夠沿著限位板水平的滑動且能夠對夾板組件進行支撐,提高夾板組件水平張開和夾持的移動的精度。
18、6、本發明提供的一種智能工廠用自動抓取轉運車,該轉運車通過設置的位移傳感器,能夠檢測塑料周轉箱的下落,使轉運車可以啟動滾動裝置,使塑料周裝箱向上移動不掉落,防止塑料周轉箱在夾持過程中,向下掉落,造成塑料周轉箱和周裝箱內的物體損壞,提高夾持過程中的安全性。
技術特征:
1.一種智能工廠用自動抓取轉運車,其特征在于,包括轉運車車體(1),轉運車車體(1)頂面設置機械臂(3)和電動氣泵(2),機械臂(3)的末端卡接水平的支撐板(4),支撐板(4)上設置驅動裝置(5),驅動裝置(5)的兩端分別設置豎直的夾板組件(6);兩夾板組件(6)相對面的氣囊層(62)分別抵貼于塑料周轉箱兩側壁,對塑料周轉箱夾持轉運;夾板組件(6)的下部設置方形孔(7),方形孔(7)內設置滾動機構(8),滾動機構(8)用于防止夾板組件(6)發生故障,在夾持塑料周轉箱過程中,塑料周轉箱向下掉落。
2.根據權利要求1所述的一種智能工廠用自動抓取轉運車,其特征在于,支撐板(4)本體包括卡接于機械臂(3)末端水平的異形板(41),異形板(41)的外端設置豎直的限位板(42)。
3.根據權利要求2所述的一種智能工廠用自動抓取轉運車,其特征在于,驅動裝置(5)包括異形板(41)中部底面設置的第一旋轉電機(51),第一旋轉電機(51)的輸出軸連接減速機(56),減速機(56)貫穿異形板(41),減速機(56)的輸出軸固定連接旋轉塊(55)的中部,旋轉塊(55)的兩端分別固定連接第一連接軸(511),第一連接軸(511)轉動連接弧形的推動塊(52),推動塊(52)的端部轉動連接第二連接軸(512),第二連接軸(512)固定連接豎直的夾板組件(6)。
4.根據權利要求3所述的一種智能工廠用自動抓取轉運車,其特征在于,夾板組件(6)中靠近支撐板(4)的側端面的中部設置限位件(53),限位件(53)中水平的桿部固定連接第二連接軸(512),限位件(53)本體下部的桿部設置限位槽(54),限位槽(54)內適配套裝限位板(42)。
5.根據權利要求4所述的一種智能工廠用自動抓取轉運車,其特征在于,夾板組件(6)還包括與限位件(53)一體成型連接的夾板層(61),夾板層(61)內側壁抵貼設置氣囊層(62),氣囊層(62)本體的表面均勻設置若干個凸塊(63),凸塊(63)抵貼塑料周轉箱的側壁。
6.根據權利要求5所述的一種智能工廠用自動抓取轉運車,其特征在于,夾板層(61)的外側壁設置進氣管(64),進氣管(64)為喇叭形狀,進氣管(64)的大的開口處貫穿夾板層(61)并與氣囊層(62)連通連接,進氣管(64)的小的開口處通過軟管與電動氣泵(2)連接。
7.根據權利要求6所述的一種智能工廠用自動抓取轉運車,其特征在于,兩夾板組件(6)的相對的內側壁上邊緣均設置位移傳感器(65),兩個位移傳感器(65)發射信號位置低于塑料周轉箱頂面至少1毫米。
8.根據權利要求1所述的一種智能工廠用自動抓取轉運車,其特征在于,滾動機構(8)包括固定于方形孔(7)頂面的頂板(81),頂板(81)兩端分別設置豎直的豎板(82),豎板(82)底面固定于方形孔(7)的底面,豎板(82)的內側面固定第二旋轉電機(83),第二旋轉電機(83)輸出軸貫穿豎板(82),并在端部套裝主動輪(88)。
9.根據權利要求8所述的一種智能工廠用自動抓取轉運車,其特征在于,滾動機構(8)還包括兩豎板(82)之間位于第二旋轉電機(83)的斜下方設置轉動軸(84),轉動軸(84)上均勻套裝若干個轉動輪(85),轉動輪(85)的外圈面均勻設置若干條防滑條(851);防滑條(851)與塑料周轉箱抵貼接觸。
10.根據權利要求9所述的一種智能工廠用自動抓取轉運車,其特征在于,兩豎板(82)的下部設置軸承(87),軸承(87)套裝轉動軸(84)的兩端,轉動軸(84)的兩端延伸出軸承(87),并在端部套裝從動輪(86),從動輪(86)與主動輪(88)外周套裝皮帶(89)傳動;從動輪(86)直徑大于主動輪(88)的直徑。
技術總結
本發明涉及轉運車技術領域,尤其是涉及一種智能工廠用自動抓取轉運車,包括轉運車車體,轉運車車體頂面設置機械臂和電動氣泵,機械臂的末端卡接水平的支撐板,支撐板上設置驅動裝置,驅動裝置的兩端分別設置豎直的夾板組件;兩夾板組件相對面的氣囊層分別抵貼于塑料周轉箱兩側壁,對塑料周轉箱夾持轉運;夾板組件的下部設置方形孔,方形孔內設置滾動機構,用于防止夾板組件發生故障,在夾持塑料周轉箱過程中,塑料周轉箱向下掉落;該抓取轉運車,對塑料周轉箱夾持受力均勻,減少夾板組件對塑料周轉箱夾持時產生變形,操作簡單,提高了夾持過程中的穩定性和安全性。
技術研發人員:周燕,趙娟,張然,張軍凱
受保護的技術使用者:河北機電職業技術學院
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!