一種用于確定晶棒等徑部分的裝置和方法與流程
本公開涉及半導體制造,尤其涉及一種用于確定晶棒等徑部分的裝置和方法。
背景技術:
1、目前用于制造半導體器件的單晶硅片主要是通過拉晶、滾磨、切割、研磨、腐蝕、清洗和拋光等一系列工藝步驟制造得到。在拉晶工藝中,采用直拉法拉制單晶硅棒(也可稱之為晶棒)的過程依次可以包括:引晶生長(neck?growth)、晶冠生長(grown?growth)、晶體生長(body?growth)以及尾部生長(tail?growth)。對應于上述過程,拉晶工藝得到的晶棒包括引晶部分、晶冠部分、等徑部分以及尾部部分。在這些部分中,通常會切除引晶部分、晶冠部分以及尾部部分之后,僅保留等徑部分進行后續的切割工藝。
2、然而,拉晶工藝得到的晶棒通常為直徑不規則的圓柱體,需要通過滾磨加工至統一的標準直徑。經過滾磨加工之后,晶棒中的晶冠部分和尾部部分中的一部分會被滾磨成與等徑部分的直徑相同,并在滾磨之后被誤認為等徑部分而被保留進行切割等后續工藝,從而導致原本不應進行后續加工工藝的部分進行加工,浪費了加工資源。
技術實現思路
1、本公開提供了一種用于確定晶棒等徑部分的裝置和方法;能夠在滾磨之后避免被誤認為等徑部分的情況出現,節省了加工資源。
2、本公開的技術方案是這樣實現的:
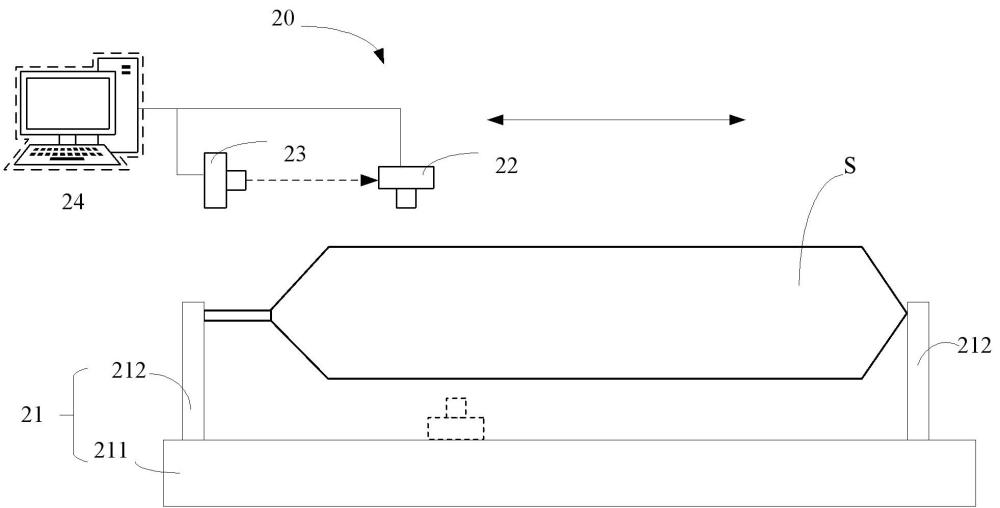
3、第一方面,本公開提供了一種用于確定晶棒等徑部分的裝置,所述裝置包括:
4、用于固定晶棒的支撐組件;
5、能夠沿所述晶棒的長度方向移動的第一測量部,用于量測所述第一測量部自身所處位置至所述晶棒在滾磨前的外周面的垂直距離;
6、第二測量部,用于量測所述第一測量部沿所述晶棒的長度方向的移動距離;
7、確定部,用于根據所述移動距離以及所述垂直距離確定所述晶棒在滾磨前的等徑部分;以及,根據所述晶棒在滾磨前的等徑部分確定所述晶棒在滾磨后的等徑部分。
8、在一些示例中,所述確定部,用于在所述晶棒滾磨前,接收第一測量部傳輸的垂直距離以及所述第二測量部所傳輸的移動距離;
9、當所述垂直距離下降至一固定距離值,且所述垂直距離隨第一測量部的移動所出現的偏差小于距離閾值時,根據所述第二測量部所量測的第一移動距離確定所述晶棒在滾磨前的等徑部分的起點;
10、當所述垂直距離開始大于該固定距離值時,根據所述第二測量部所量測的第二移動距離確定所述晶棒在滾磨前的等徑部分的終點。
11、在一些示例中,所述確定部,用于根據所述晶棒在滾磨前的等徑部分的起點和所述晶棒在滾磨前的等徑部分的終點在滾磨之后的所述晶棒上確定滾磨前原屬于等徑部分的區域。
12、在一些示例中,所述支撐組件包括:
13、基座或支架;
14、沿所述基座或支架的長度方向對稱設置的兩個夾持部,用于相對抵壓所述晶棒的兩端以夾持所述晶棒。
15、在一些示例中,所述裝置還包括:沿所述晶棒的長度方向布設的滑動導軌,用以承載所述第一測量部移動。
16、在一些示例中,所述第一測量部包括無線測距傳感器或接觸式位移傳感器。
17、在一些示例中,所述第二測量部,用于朝向所述第一測量部進行量測以得到所述第一測量部沿所述晶棒的長度方向的移動距離。
18、在一些示例中,所述裝置還包括:標記部,用于在滾磨后的所述晶棒上,根據所述確定部所確定的所述晶棒在滾磨后的等徑部分進行標記。
19、第二方面,本公開提供了一種用于確定晶棒等徑部分的方法,所述方法應用于如第一方面及其示例中的任一項所述的用于確定晶棒等徑部分的裝置,所述方法包括:
20、通過第一測量部沿所述晶棒的長度方向移動并量測所述第一測量部自身所處位置至所述晶棒在滾磨前的外周面的垂直距離;
21、通過第二測量部量測所述第一測量部沿所述晶棒的長度方向的移動距離;
22、通過確定部根據所述移動距離以及所述垂直距離確定所述晶棒在滾磨前的等徑部分;
23、通過確定部根據所述晶棒在滾磨前的等徑部分確定所述晶棒在滾磨后的等徑部分。
24、在一些示例中,所述通過確定部根據所述移動距離以及所述垂直距離確定所述晶棒在滾磨前的等徑部分,包括:
25、當所述垂直距離下降至一固定距離值,且所述垂直距離隨第一測量部的移動所出現的偏差小于距離閾值時,根據所述第二測量部所量測的第一移動距離確定所述晶棒在滾磨前的等徑部分的起點;
26、當所述垂直距離開始大于該固定距離值時,根據所述第二測量部所量測的第二移動距離確定所述晶棒在滾磨前的等徑部分的終點;
27、根據所述晶棒在滾磨前的等徑部分的起點和所述晶棒在滾磨前的等徑部分的終點在滾磨之后的所述晶棒上確定滾磨前原屬于等徑部分的區域。
28、本公開提供了一種用于確定晶棒等徑部分的裝置和方法;利用第一測量部沿晶棒的長度方向移動并測量垂直距離,并且根據垂直距離以及第一測量部的移動距離確定晶棒在滾磨前的等徑部分,接著在晶棒完成滾磨之后,根據晶棒在滾磨前的等徑部分確定晶棒在滾磨后的等徑部分,從而避免出現原屬于晶冠部分以及尾部部分的部分區域被誤認為等徑部分的情況,節省了加工資源,提高了最終產出的單晶硅片的整體品質。
技術特征:
1.一種用于確定晶棒等徑部分的裝置,其特征在于,所述裝置包括:
2.根據權利要求1所述的裝置,其特征在于,所述確定部,用于在所述晶棒滾磨前,接收第一測量部傳輸的垂直距離以及所述第二測量部所傳輸的移動距離;
3.根據權利要求2所述的裝置,其特征在于,所述確定部,用于根據所述晶棒在滾磨前的等徑部分的起點和所述晶棒在滾磨前的等徑部分的終點在滾磨之后的所述晶棒上確定滾磨前原屬于等徑部分的區域。
4.根據權利要求1所述的裝置,其特征在于,所述支撐組件包括:
5.根據權利要求1所述的裝置,其特征在于,所述裝置還包括:沿所述晶棒的長度方向布設的滑動導軌,用以承載所述第一測量部移動。
6.根據權利要求1所述的裝置,其特征在于,所述第一測量部包括無線測距傳感器或接觸式位移傳感器。
7.根據權利要求1所述的裝置,其特征在于,所述第二測量部,用于朝向所述第一測量部進行量測以得到所述第一測量部沿所述晶棒的長度方向的移動距離。
8.根據權利要求1所述的裝置,其特征在于,所述裝置還包括:標記部,用于在滾磨后的所述晶棒上,根據所述確定部所確定的所述晶棒在滾磨后的等徑部分進行標記。
9.一種用于確定晶棒等徑部分的方法,其特征在于,所述方法應用于如權利要求1至8任一項所述的用于確定晶棒等徑部分的裝置,所述方法包括:
10.根據權利要求9所述的方法,其特征在于,所述通過確定部根據所述移動距離以及所述垂直距離確定所述晶棒在滾磨前的等徑部分,包括:
技術總結
本公開提供了一種用于確定晶棒等徑部分的裝置和方法;該裝置包括:用于固定晶棒的支撐組件;能夠沿所述晶棒的長度方向移動的第一測量部,用于量測所述第一測量部自身所處位置至所述晶棒在滾磨前的外周面的垂直距離;第二測量部,用于量測所述第一測量部沿所述晶棒的長度方向的移動距離;確定部,用于根據所述移動距離以及所述垂直距離確定所述晶棒在滾磨前的等徑部分;以及,根據所述晶棒在滾磨前的等徑部分確定所述晶棒在滾磨后的等徑部分。
技術研發人員:房大偉
受保護的技術使用者:西安奕斯偉材料科技股份有限公司
技術研發日:
技術公布日:2025/3/10
- 還沒有人留言評論。精彩留言會獲得點贊!