車輛控制方法及裝置與流程
本技術涉及汽車安全,特別涉及一種車輛控制方法及裝置。
背景技術:
1、隨著新能源汽車的不斷技術迭代,為了解決新能源汽車的駐車安全問題,哨兵模式在新能源汽車中被廣泛應用。其中,哨兵模式是指車輛能夠通過感知系統(tǒng)(比如車輛上設置的傳感器和攝像頭等),來感知并記錄車輛周邊的危險因素以及車輛發(fā)生的諸如碰撞或擦刮等事故,進而為用戶提供可供追溯的證明。然而,目前車輛駐車后便開啟哨兵模式,即攝像頭和傳感器等在駐車后會處于持續(xù)工作的狀態(tài),車輛功耗較大。
技術實現(xiàn)思路
1、本技術實施例提供了一種車輛控制方法及裝置。所述技術方案如下:
2、一方面,提供了一種車輛控制方法,所述方法包括:
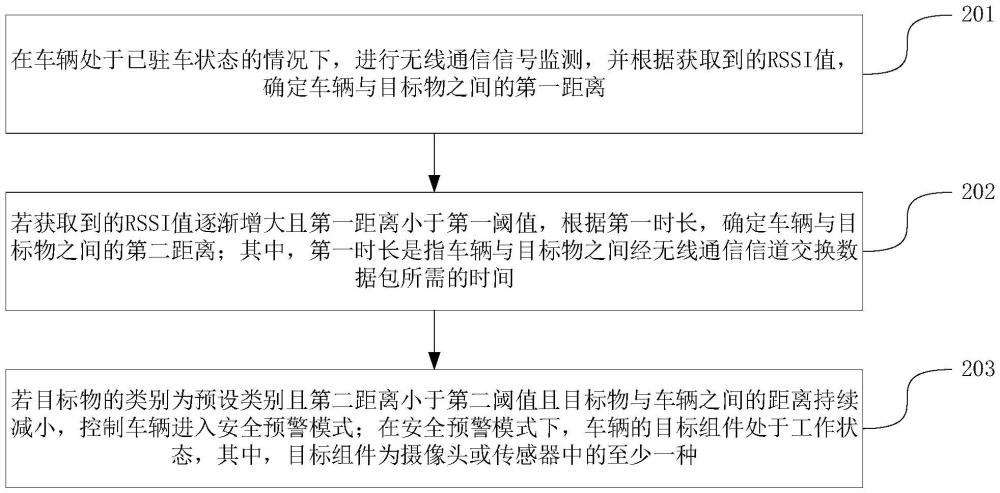
3、在車輛處于已駐車狀態(tài)的情況下,進行無線通信信號監(jiān)測,并根據(jù)獲取到的rssi(received?signal?strength?indication,接收信號強度指示)值,確定所述車輛與目標物之間的第一距離;其中,所述rssi值用于衡量接收到的所述無線通信信號的強度;
4、若獲取到的rssi值逐漸增大且所述第一距離小于第一閾值,根據(jù)第一時長,確定所述車輛與所述目標物之間的第二距離;其中,所述第一時長是指所述車輛與所述目標物之間經(jīng)無線通信信道交換數(shù)據(jù)包所需的時間;
5、若所述目標物的類別為預設類別且所述第二距離小于第二閾值且所述目標物與所述車輛之間的距離持續(xù)減小,控制所述車輛進入安全預警模式;
6、其中,在所述安全預警模式下,所述車輛的目標組件處于工作狀態(tài),所述目標組件為攝像頭或傳感器中的至少一種。
7、在一些實施例中,所述控制所述車輛進入安全預警模式,包括:
8、啟動所述目標組件,并獲取所述目標組件采集到的數(shù)據(jù);
9、根據(jù)所述目標組件采集到的數(shù)據(jù),確定所述目標物的運動特征;其中,所述運動特征包括運動速度、運動軌跡或運動趨勢中的至少一種;
10、若基于所述目標物的運動特征確定所述車輛存在安全風險,控制所述車輛發(fā)出告警。
11、在另一些實施例中,所述方法還包括:
12、獲取所述車輛的駐車位置和駐車環(huán)境;
13、若所述駐車環(huán)境下的環(huán)境亮度小于亮度閾值,啟動所述車輛的外部照明組件,并根據(jù)所述駐車位置對應的安全風險等級,控制所述車輛上安裝在目標位置上的攝像頭進行數(shù)據(jù)采集。
14、在另一些實施例中,所述方法還包括:
15、獲取所述車輛的駐車位置;
16、根據(jù)所述駐車位置的障礙物情況,控制所述車輛上目標類型的傳感器進行數(shù)據(jù)采集;
17、其中,所述障礙物情況包括障礙物相對所述車輛的位置、障礙物類型或障礙物體積中的至少一種。
18、在另一些實施例中,所述若基于所述目標物的運動特征確定所述車輛存在安全風險,控制所述車輛發(fā)出告警,包括以下至少一項:
19、若基于所述目標物的運動特征確定所述車輛存在安全風險,控制所述車輛輸出語音告警并控制所述車輛的外部燈光組件閃爍;
20、若基于所述目標物的運動特征確定所述車輛存在安全風險,控制所述車輛向目標終端發(fā)送告警通知;其中,所述告警通知中攜帶用于指示所述車輛存在安全風險的多媒體資源。
21、在另一些實施例中,所述根據(jù)第一時長,確定所述車輛與所述目標物之間的第二距離,包括:
22、在以所述車輛作為啟動器、以所述目標物作為反射器的情況下,獲取加密數(shù)據(jù)包的往返時間;其中,所述往返時間是指所述啟動器向所述反射器發(fā)送所述加密數(shù)據(jù)包后,所述啟動器再接收到所述反射器返回的所述加密數(shù)據(jù)包所需的時間;
23、根據(jù)所述往返時間確定所述第一時長,并根據(jù)所述第一時長和光速確定所述第二距離。
24、在另一些實施例中,所述根據(jù)所述往返時間確定所述第一時長,包括:
25、根據(jù)所述往返時間和第二時長,確定所述第一時長;
26、其中,所述第二時長是指所述反射器處理接收到的所述加密數(shù)據(jù)包至向所述啟動器發(fā)送處理后的加密數(shù)據(jù)包所需的時間。
27、在另一些實施例中,在控制所述車輛進入所述安全預警模式后,所述方法還包括:
28、若根據(jù)當前獲取到的第一時長確定當前的第二距離大于所述第二閾值,且持續(xù)時間達到第三閾值,控制所述目標組件關閉。
29、在另一些實施例中,在控制所述車輛進入所述安全預警模式后,所述方法還包括:
30、若根據(jù)當前獲取到的第一時長確定當前的第二距離大于所述第四閾值,且持續(xù)時間達到第五閾值,執(zhí)行根據(jù)獲取到的rssi值確定所述車輛與目標物之間的第一距離的步驟。
31、另一方面,提供了一種車輛控制裝置,所述裝置包括:
32、第一確定模塊,被配置為在車輛處于已駐車狀態(tài)的情況下,進行無線通信信號監(jiān)測,并根據(jù)獲取到的rssi值,確定所述車輛與目標物之間的第一距離;其中,所述rssi值用于衡量接收到的所述無線通信信號的強度;
33、第二確定模塊,被配置為若獲取到的rssi值逐漸增大且所述第一距離小于第一閾值,根據(jù)第一時長,確定所述車輛與所述目標物之間的第二距離;其中,所述第一時長是指所述車輛與所述目標物之間經(jīng)無線通信信道交換數(shù)據(jù)包所需的時間;
34、控制模塊,被配置為若所述目標物的類別為預設類別且所述第二距離小于第二閾值且所述目標物與所述車輛之間的距離持續(xù)減小,控制所述車輛進入安全預警模式;
35、其中,在所述安全預警模式下,所述車輛的目標組件處于工作狀態(tài),所述目標組件為攝像頭或傳感器中的至少一種。
36、在一些實施例中,所述控制模塊,被配置為:
37、啟動所述目標組件,并獲取所述目標組件采集到的數(shù)據(jù);
38、根據(jù)所述目標組件采集到的數(shù)據(jù),確定所述目標物的運動特征;其中,所述運動特征包括運動速度、運動軌跡或運動趨勢中的至少一種;
39、若基于所述目標物的運動特征確定所述車輛存在安全風險,控制所述車輛發(fā)出告警。
40、在另一些實施例中,所述控制模塊,還被配置為:
41、獲取所述車輛的駐車位置和駐車環(huán)境;
42、若所述駐車環(huán)境下的環(huán)境亮度小于亮度閾值,啟動所述車輛的外部照明組件,并根據(jù)所述駐車位置對應的安全風險等級,控制所述車輛上安裝在目標位置上的攝像頭進行數(shù)據(jù)采集。
43、在另一些實施例中,所述控制模塊,還被配置為:
44、獲取所述車輛的駐車位置;
45、根據(jù)所述駐車位置的障礙物情況,控制所述車輛上目標類型的傳感器進行數(shù)據(jù)采集;
46、其中,所述障礙物情況包括障礙物相對所述車輛的位置、障礙物類型或障礙物體積中的至少一種。
47、在另一些實施例中,所述控制模塊,被配置為執(zhí)行以下至少一項:
48、若基于所述目標物的運動特征確定所述車輛存在安全風險,控制所述車輛輸出語音告警并控制所述車輛的外部燈光組件閃爍;
49、若基于所述目標物的運動特征確定所述車輛存在安全風險,控制所述車輛向目標終端發(fā)送告警通知;其中,所述告警通知中攜帶用于指示所述車輛存在安全風險的多媒體資源。
50、在另一些實施例中,所述第二確定模塊,被配置為:
51、在以所述車輛作為啟動器、以所述目標物作為反射器的情況下,獲取加密數(shù)據(jù)包的往返時間;其中,所述往返時間是指所述啟動器向所述反射器發(fā)送所述加密數(shù)據(jù)包后,所述啟動器再接收到所述反射器返回的所述加密數(shù)據(jù)包所需的時間;
52、根據(jù)所述往返時間確定所述第一時長,并根據(jù)所述第一時長和光速確定所述第二距離。
53、在另一些實施例中,所述第二確定模塊,被配置為:
54、根據(jù)所述往返時間和第二時長,確定所述第一時長;
55、其中,所述第二時長是指所述反射器處理接收到的所述加密數(shù)據(jù)包至向所述啟動器發(fā)送處理后的加密數(shù)據(jù)包所需的時間。
56、在另一些實施例中,所述控制模塊,還被配置為:
57、在控制所述車輛進入所述安全預警模式后,若根據(jù)當前獲取到的第一時長確定當前的第二距離大于所述第二閾值,且持續(xù)時間達到第三閾值,控制所述目標組件關閉。
58、在另一些實施例中,所述第一確定模塊,還被配置為:
59、在控制所述車輛進入所述安全預警模式后,若根據(jù)當前獲取到的第一時長確定當前的第二距離大于所述第四閾值,且持續(xù)時間達到第五閾值,執(zhí)行根據(jù)獲取到的rssi值確定所述車輛與目標物之間的第一距離的步驟。
60、另一方面,提供了一種車輛,所述設備包括處理器和存儲器,所述存儲器中存儲有至少一條程序代碼,所述至少一條程序代碼由所述處理器加載并執(zhí)行以實現(xiàn)上述的車輛控制方法。
61、另一方面,提供了一種計算機可讀存儲介質,所述存儲介質中存儲有至少一條程序代碼,所述至少一條程序代碼由處理器加載并執(zhí)行以實現(xiàn)上述的車輛控制方法。
62、另一方面,提供了一種計算機程序產品或計算機程序,該計算機程序產品或計算機程序包括計算機程序代碼,該計算機程序代碼存儲在計算機可讀存儲介質中,車輛的處理器從計算機可讀存儲介質讀取該計算機程序代碼,處理器執(zhí)行該計算機程序代碼,使得車輛執(zhí)行上述的車輛控制方法。
63、本技術實施例提供了一種基于無線通信信號感知的車輛控制方案。該方案能夠通過監(jiān)測無線通信信號來激活或關閉哨兵模式,即哨兵模式的激活需要滿足一定的激活條件。詳細來說,在駐車后首先進行無線通信信號監(jiān)測,并基于rssi值的測距方式來初步檢測車輛周邊的動態(tài)環(huán)境。之后,該方案會再基于無線通信信號的強度變化和初步測定的距離,來判定是否切換至更為精準的基于信道探測的測距方式。若基于信道探測的測距方式完成測距后,確定當前滿足哨兵模式的激活條件,則激活哨兵模式,該方案實現(xiàn)了在必要時才激活哨兵模式,有效地降低了監(jiān)測成本,車輛功耗低。另外,雙重測距方式也確保了車輛控制的準確性,同時由于攝像頭或傳感器等不是處于持續(xù)工作的狀態(tài),因此也間接降低了侵犯他人的個人隱私的風險。
- 還沒有人留言評論。精彩留言會獲得點贊!