一種全地形無人車輛的懸架系統的制作方法
本發明涉及無人車輛懸架的,具體涉及一種全地形無人車輛的懸架系統。
背景技術:
1、隨著自動駕駛技術的快速發展,無人車輛在智能交通、物流運輸、軍事偵察以及復雜地形探測等領域的應用日益廣泛。無人車輛憑借其自主決策和智能控制能力,已逐漸成為現代交通和工業的重要組成部分。然而,無人車輛在行駛過程中需要面對復雜多變的地形環境,如泥濘道路、沙石路面、崎嶇山地和城市工地等,這對車輛的懸架系統提出了更高的要求。
2、現在已經開發出了很多無人車輛的懸架系統,經過我們大量的檢索與參考,發現現有技術的無人車輛的懸架系統有如公開號為cn112874255a、cn113978196a、cn113071279a、us20160297065a1所公開的無人車輛的懸架系統,這些無人車輛的懸架系統一般包括:數據獲取終端、懸架本體和調控分析終端;數據獲取終端用于獲取無人車輛和懸架本體的工作參數;調控分析終端用于根據工作參數進行分析并生成調控指令,懸架本體用于實現基礎功能并基于調控指令進行工作狀態調節。由于上述無人車輛的懸架系統的工作過程較為單一,缺少對于不同路況的自適應調節,造成了無人車輛懸架系統的準確性和穩定性下降的缺陷。
技術實現思路
1、本發明的目的在于,針對上述無人車輛的懸架系統存在的不足,提出一種全地形無人車輛的懸架系統。
2、本發明采用如下技術方案:
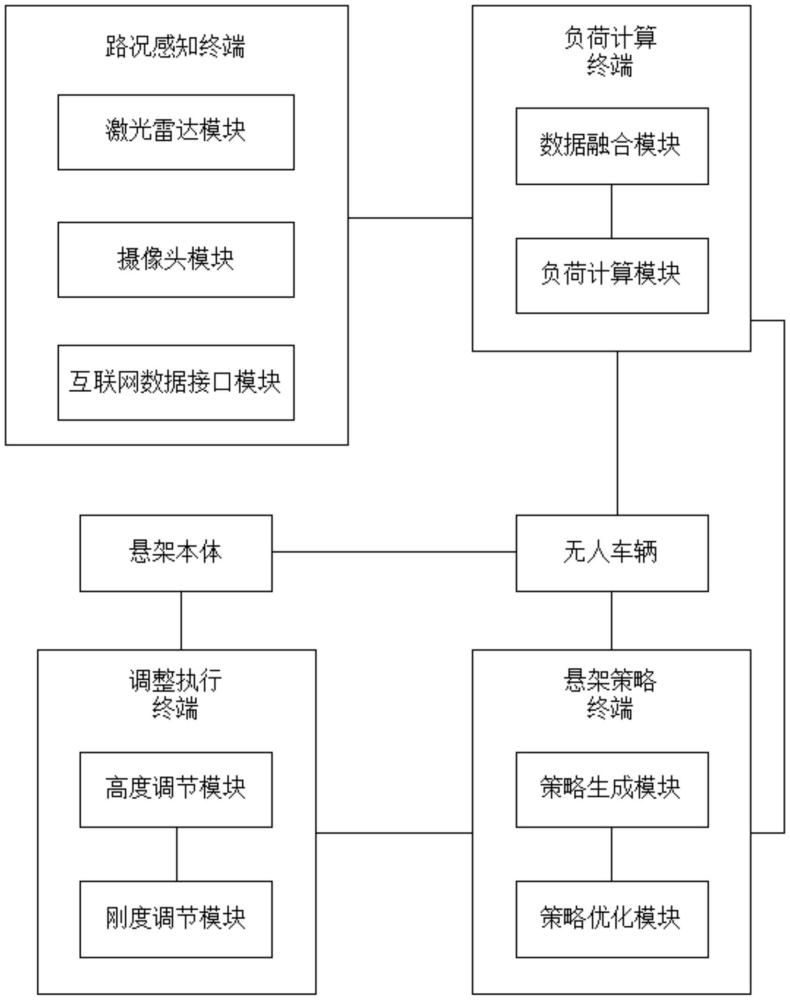
3、一種全地形無人車輛的懸架系統,包括懸架本體、路況感知終端、負荷計算終端、懸架策略終端和調整執行終端;所述懸架本體用于支撐車身,為無人車輛提供車輛懸架的基礎功能;所述路況感知終端用于實時采集無人車輛行駛路段的路況數據;所述負荷計算終端用于根據路況數據和無人車輛的狀態數據,生成無人車輛負荷信息;所述懸架策略終端用于根據無人車輛負荷信息,生成懸架調整策略信息;所述調整執行終端用于根據懸架調整策略信息執行調整操作,控制所述懸架本體執行對應的調整策略;
4、所述路況感知終端包括激光雷達模塊、攝像頭模塊和互聯網數據接口模塊;所述激光雷達模塊用于獲取無人車輛行駛路段的路面高度變化和地形特征;所述攝像頭模塊用于采集無人車輛前方路段的圖像數據,提取路面紋理和障礙物信息;所述互聯網數據接口模塊用于獲取未來路段的實時交通和路況信息。
5、可選的,所述負荷計算終端包括數據融合模塊和負荷計算模塊;所述數據融合模塊用于接收并整合來自所述路況感知終端的路況數據;所述負荷計算模塊用于基于路況數據和無人車輛的狀態數據,生成無人車輛負荷信息。
6、可選的,所述懸架策略終端包括策略生成模塊和策略優化模塊;所述策略生成模塊用于根據無人車輛負荷信息,制定懸架調整的初步策略;所述策略優化模塊用于基于實際工作環境和懸架性能,對初步策略進行優化,生成懸架調整策略信息。
7、可選的,所述調整執行終端包括高度調節模塊和剛度調節模塊;所述高度調節模塊用于執行所述懸架調整策略信息中的高度調整操作,改變所述懸架本體的高度以適應路面變化;所述剛度調節模塊用于執行所述懸架調整策略信息中的剛度調整操作。
8、可選的,所述負荷計算模塊包括懸掛負荷指數計算子模塊和無人車輛負荷信息生成子模塊;所述懸掛負荷指數計算子模塊用于根據路況數據和無人車輛的狀態數據計算懸掛負荷指數;所述無人車輛負荷信息生成子模塊用于根據懸掛負荷指數生成無人車輛負荷信息。
9、可選的,所述策略優化模塊包括策略優化子模塊、高度調節計算子模塊、剛度調節計算子模塊和懸架調整策略信息生成子模塊;所述策略優化子模塊用于基于實際工作環境和懸架性能,對初步策略中的車速和路徑選擇進行優化;所述高度調節計算子模塊用于根據初步策略計算懸架的高度調節值;所述剛度調節計算子模塊用于根據初步策略計算懸架的剛度調節值;所述懸架調整策略信息生成子模塊用于根據優化后的車速、路徑選擇、高度調節值和剛度調節值,生成懸架調整策略信息。
10、一種全地形無人車輛的懸架系統調節方法,應用于如上述的一種全地形無人車輛的懸架系統,所述懸架系統調節方法包括:
11、s1,實時采集無人車輛行駛路段的路況數據;
12、s2,根據路況數據和無人車輛的狀態數據,生成無人車輛負荷信息;
13、s3,根據無人車輛負荷信息,生成懸架調整策略信息;
14、s4,根據懸架調整策略信息執行調整操作,控制所述懸架本體執行對應的調整策略。
15、本發明所取得的有益效果是:
16、1、通過懸架本體、路況感知終端、負荷計算終端、懸架策略終端和調整執行終端的設置,實現了對無人車輛行駛路段的路況數據、車輛狀態數據和懸架調整策略的高效處理,有利于動態調整懸架系統的性能,進而提高無人車輛在全地形條件下的穩定性、準確性和通過性,從而有利于提升無人車輛的綜合適應能力。
17、2、通過數據融合模塊和負荷計算模塊的設置,實現了對路況數據和車輛狀態數據的整合處理,有利于全面反映無人車輛當前行駛狀態下的負荷情況,進而生成準確的負荷信息,從而有利于為懸架策略的制定提供精準的數據支持。
18、3、通過策略生成模塊和策略優化模塊的設置,實現了懸架調整策略從初步生成到針對實際工作環境優化的閉環控制,有利于提升懸架調整策略的科學性和適用性,進而優化無人車輛的懸架性能,從而有利于確保車輛在復雜地形環境下的高效運行。
19、4、通過高度調節模塊和剛度調節模塊的設置,實現了懸架系統高度和剛度的動態調整,有利于根據路況和車輛狀態快速適應不同的地形條件,進而提升懸架系統對地形沖擊的響應能力,從而有利于增強車輛在全地形條件下的穩定性和舒適性。
20、5、通過懸掛負荷指數計算子模塊和無人車輛負荷信息生成子模塊的設置,實現了對懸掛負荷指數的精確計算和無人車輛負荷信息的生成,有利于全面評估車輛在當前路況下的懸掛負荷狀態,進而為懸架調整策略提供精準的基礎數據,從而有利于提升懸架系統的動態調節性能。
21、6、通過策略優化子模塊、高度調節計算子模塊、剛度調節計算子模塊和懸架調整策略信息生成子模塊的設置,實現了對懸架調整策略的全面優化,包括車速、路徑選擇、高度調節值和剛度調節值的多維參數優化,有利于提升懸架調整策略的全面性和精確性,進而增強車輛在復雜地形環境下的綜合適應能力,從而有利于實現無人車輛在全地形條件下的智能懸架控制。
22、7、通過懸掛負荷指數的計算模型的設置,綜合考慮了路面數據、車輛動態數據和懸架工作狀態,實現了對懸掛系統負荷狀態的精確量化,有利于實時評估懸架系統的當前工作狀態,進而為懸架調整策略的制定提供精準的基礎數據,從而有利于提高無人車輛在復雜地形環境下的穩定性、舒適性和通過性。
23、8、通過基于多源信息融合的路面智能識別與懸架自適應調節算法的設置,結合激光雷達、攝像頭和互聯網路況數據,實現了對路面特征的全面識別,并生成精準的懸架調整策略;同時,通過調節值限定機制,有利于確保調整策略的可執行性,避免調節值超出懸架系統實際工作范圍,進而提升懸架系統的動態適應性和調節精度,從而有利于保障無人車輛在全地形條件下的綜合性能和智能控制能力。
24、為使能更進一步了解本發明的特征及技術內容,請參閱以下有關本發明的詳細說明與附圖,然而所提供的附圖僅用于提供參考與說明,并非用來對本發明加以限制。
- 還沒有人留言評論。精彩留言會獲得點贊!