基于C-V2X的汽車哨兵監(jiān)控方法、系統(tǒng)、電子設(shè)備及存儲(chǔ)介質(zhì)與流程
本公開屬于智能汽車,尤其涉及基于c-v2x的汽車哨兵監(jiān)控方法、系統(tǒng)、電子設(shè)備及存儲(chǔ)介質(zhì)。
背景技術(shù):
1、隨著汽車智能化的發(fā)展,汽車的安全防護(hù)需求日益增長(zhǎng)。傳統(tǒng)的汽車哨兵模式主要依賴車載攝像頭和傳感器進(jìn)行監(jiān)測(cè)。主要側(cè)重于車輛在停車狀態(tài)下對(duì)自身周邊環(huán)境的監(jiān)測(cè),重點(diǎn)是防止車輛在停放期間受到碰撞、刮擦、非法入侵等損害。
2、傳統(tǒng)的哨兵模式在對(duì)自身周邊環(huán)境監(jiān)測(cè)并受到威脅時(shí),會(huì)發(fā)動(dòng)汽車的警報(bào)或大音量播放音樂,并且車輛鳴笛、閃燈,對(duì)潛在的威脅者起到警示,然而受到威脅發(fā)出警示的車輛僅僅只是當(dāng)前受到威脅的車輛,周圍環(huán)境沒有任何信息交互和反饋,使得哨兵模式下根據(jù)環(huán)境信息較為局限的同時(shí)監(jiān)控報(bào)警的安全防護(hù)性能有待改進(jìn)。
技術(shù)實(shí)現(xiàn)思路
1、為解決上述問題,本公開提供了基于c-v2x的汽車哨兵監(jiān)控方法、系統(tǒng)、電子設(shè)備及存儲(chǔ)介質(zhì),通過c-v2x與汽車哨兵技術(shù)結(jié)合,使得車輛可以與周邊車輛和基礎(chǔ)設(shè)施進(jìn)行信息交互,獲取更廣泛的環(huán)境信息,有助于提高哨兵監(jiān)控策略的感知范圍和響應(yīng)能力,從而提高車輛的安全防護(hù)性能。
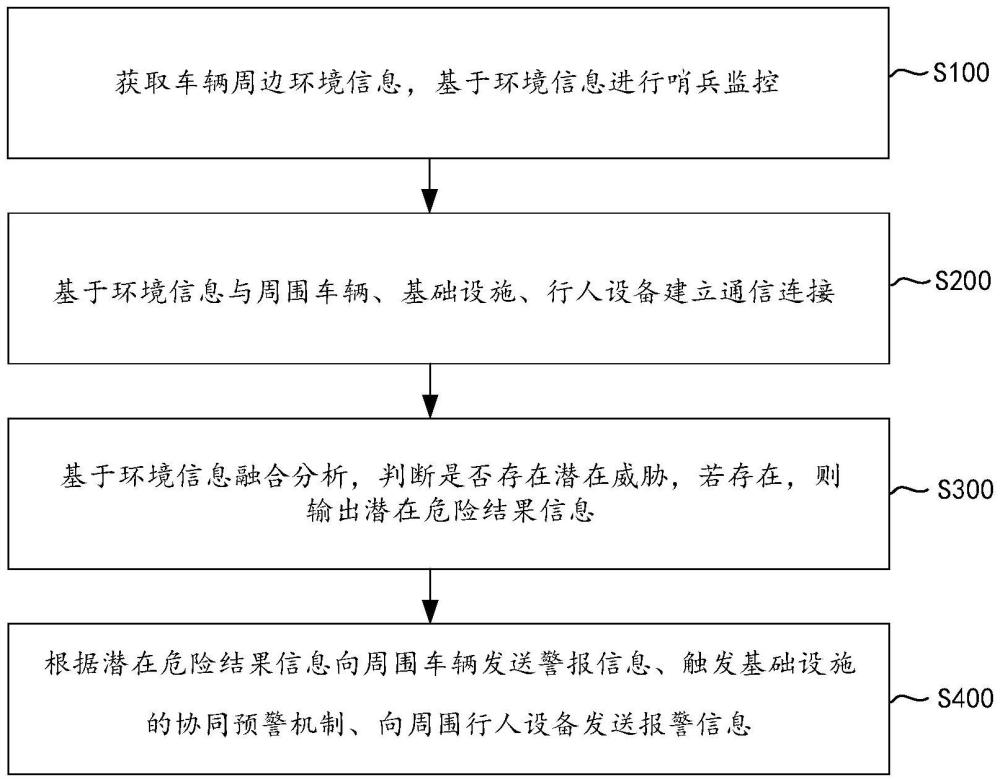
2、本公開第一方面提供基于c-v2x的汽車哨兵監(jiān)控方法,方法包括:獲取車輛周邊環(huán)境信息,基于所述環(huán)境信息進(jìn)行哨兵監(jiān)控;基于所述環(huán)境信息與周圍車輛、基礎(chǔ)設(shè)施及行人設(shè)備建立通信連接;基于所述環(huán)境信息融合分析,判斷是否存在潛在威脅,若存在,則輸出潛在危險(xiǎn)結(jié)果信息;根據(jù)所述潛在危險(xiǎn)結(jié)果信息向周圍車輛發(fā)送警報(bào)信息、觸發(fā)基礎(chǔ)設(shè)施的協(xié)同預(yù)警機(jī)制、向周圍行人設(shè)備發(fā)送報(bào)警信息。
3、如此設(shè)置,當(dāng)車輛處于哨兵模式下,若檢測(cè)到潛在威脅,可通過c-v2x迅速向周邊車輛、基礎(chǔ)設(shè)施及行人設(shè)備發(fā)送警報(bào)信息,實(shí)現(xiàn)協(xié)同預(yù)警,以監(jiān)控車輛周圍異常活動(dòng)的同時(shí)拓展感知范圍和響應(yīng)能力,并結(jié)合周圍的車輛、基礎(chǔ)設(shè)施及行人設(shè)備進(jìn)行報(bào)警,以將周圍環(huán)境中基礎(chǔ)設(shè)施和行人設(shè)備進(jìn)行信息交互并形成報(bào)警反饋,增大哨兵模式下監(jiān)控的范圍,使得車輛哨兵架空?qǐng)?bào)警的策略更加完善,從而提高車輛的安全防護(hù)性能。
4、在一些實(shí)施例中,所述環(huán)境信息包括圖像信息和距離速度信息,所述圖像信息由車輛周圍環(huán)境數(shù)據(jù)生成,所述距離速度信息由車速數(shù)據(jù)和雷達(dá)數(shù)據(jù)生成。
5、如此設(shè)置,以便于根據(jù)車輛周圍的圖像、車輛自身的車速,以及車輛距離周圍物體的距離綜合監(jiān)控,增強(qiáng)哨兵監(jiān)控的精細(xì)度,提升哨兵監(jiān)控的準(zhǔn)確性。
6、在一些實(shí)施例中,所述獲取車輛周邊環(huán)境信息,基于所述環(huán)境信息進(jìn)行哨兵監(jiān)控包括:獲取車輛周邊環(huán)境中物體特征的圖像數(shù)據(jù)、車輛車速數(shù)據(jù)和雷達(dá)數(shù)據(jù);基于所述車速數(shù)據(jù)、圖像數(shù)據(jù)和雷達(dá)數(shù)據(jù)進(jìn)行ai算法分析處理,生成分析結(jié)果;根據(jù)所述分析結(jié)果判斷是否開啟哨兵監(jiān)控。
7、如此設(shè)置,通過ai算法訓(xùn)練收集到的圖像數(shù)據(jù)、車速數(shù)據(jù)和雷達(dá)數(shù)據(jù),綜合判斷當(dāng)前車輛周圍條件是否滿足開啟哨兵監(jiān)控的條件,并預(yù)測(cè)可能的碰撞風(fēng)險(xiǎn),進(jìn)而開啟哨兵監(jiān)控進(jìn)行精準(zhǔn)檢測(cè)。
8、在一些實(shí)施例中,所述基于所述圖像信息和距離速度信息進(jìn)行ai算法分析處理,生成分析結(jié)果包括:對(duì)所述車速數(shù)據(jù)判斷是否低于設(shè)定的閾值,輸出車速判斷結(jié)果;分析所述圖像數(shù)據(jù)中的物體特征和運(yùn)動(dòng)趨勢(shì),以及雷達(dá)數(shù)據(jù)中的物體距離和速度變化,綜合判斷環(huán)境是否復(fù)雜,輸出環(huán)境判斷結(jié)果;基于所述車速判斷結(jié)果和所述環(huán)境判斷結(jié)果生成分析結(jié)果。
9、如此設(shè)置,通過ai算法判斷車速數(shù)據(jù)低于設(shè)定的閾值,輸出車速較低的判斷結(jié)果,通過ai算法判斷圖像數(shù)據(jù)中的物體特征較多、運(yùn)動(dòng)趨勢(shì)明顯,以及雷達(dá)數(shù)據(jù)中的距離較近、速度變化較快,等綜合判斷環(huán)境復(fù)雜,輸出環(huán)境復(fù)雜的判斷結(jié)果,滿足車速較低的判斷結(jié)果和環(huán)境復(fù)雜的判斷結(jié)果其中之一,則生成ai算法對(duì)圖像數(shù)據(jù)、車速數(shù)據(jù)及雷達(dá)數(shù)據(jù)的分析結(jié)果,有助于精確判斷開啟哨兵監(jiān)控。
10、在一些實(shí)施例中,所述根據(jù)所述分析結(jié)果判斷是否開啟哨兵監(jiān)控包括:若所述車速判斷結(jié)果為低于設(shè)定的閾值,則開啟哨兵監(jiān)控;若所述環(huán)境判斷結(jié)果為復(fù)雜,則開啟哨兵監(jiān)控。
11、如此設(shè)置,滿足車速低于設(shè)定的閾值或滿足環(huán)境復(fù)雜的情況,二者滿足其一就開啟哨兵監(jiān)控,使得哨兵監(jiān)控的開啟更加合理,并減少哨兵監(jiān)控的誤開啟情況。
12、在一些實(shí)施例中,所述方法還包括;基于所述環(huán)境信息與云端服務(wù)器建立通信連接;將車輛自身狀態(tài)數(shù)據(jù)和實(shí)時(shí)數(shù)據(jù)上傳至所述云端服務(wù)器。
13、如此設(shè)置,通過與云端服務(wù)器進(jìn)行連接,實(shí)現(xiàn)遠(yuǎn)程監(jiān)控和數(shù)據(jù)存儲(chǔ)。
14、在一些實(shí)施例中,所述車輛的自身狀態(tài)數(shù)據(jù)包括車速數(shù)據(jù)、位置數(shù)據(jù)、哨兵監(jiān)控觸發(fā)狀態(tài),所述車輛實(shí)時(shí)數(shù)據(jù)包括圖像數(shù)據(jù)和雷達(dá)數(shù)據(jù)。
15、如此設(shè)置,通過將車輛自身狀態(tài)數(shù)據(jù)和實(shí)時(shí)數(shù)據(jù)上傳至云端,以便于通過移動(dòng)終端隨時(shí)查看車輛狀態(tài),同時(shí)云端的智能算法可對(duì)數(shù)據(jù)進(jìn)行分析,為后續(xù)的安全決策提供依據(jù)。
16、本公開第二方面提供基于c-v2x的汽車哨兵監(jiān)控系統(tǒng),所述系統(tǒng)包括監(jiān)控模塊,用于獲取車輛周邊環(huán)境信息,基于所述環(huán)境信息進(jìn)行哨兵監(jiān)控;通信模塊,用于基于所述環(huán)境信息與周圍車輛、基礎(chǔ)設(shè)施、行人設(shè)備建立通信連接;分析計(jì)算模塊,用于基于所述環(huán)境信息融合分析,判斷是否存在潛在威脅,若存在,則輸出潛在危險(xiǎn)結(jié)果信息;報(bào)警模塊,用于根據(jù)所述潛在危險(xiǎn)結(jié)果信息向周圍車輛發(fā)送警報(bào)信息、觸發(fā)基礎(chǔ)設(shè)施的協(xié)同預(yù)警機(jī)制、向周圍行人設(shè)備發(fā)送報(bào)警信息。
17、如此設(shè)置。以便于車輛向周邊車輛發(fā)送自身的狀態(tài)信息,同時(shí)接收周邊車輛的相關(guān)信息,實(shí)現(xiàn)協(xié)同預(yù)警等功能。與基礎(chǔ)設(shè)施的連接可以使車輛獲取路況信息、交通信號(hào)信息等,從而更好地規(guī)劃行駛路徑。與行人設(shè)備的連接可能用于接收行人的位置和移動(dòng)意圖等信息,提高行人與車輛交互的安全性。
18、本公開第三方面提供一種電子設(shè)備,所述電子設(shè)備包括:存儲(chǔ)器,用于存儲(chǔ)計(jì)算機(jī)程序;處理器,用于執(zhí)行所述計(jì)算機(jī)程序時(shí)實(shí)現(xiàn)如第一方面所述的基于c-v2x的汽車哨兵監(jiān)控方法。
19、第三方面任一種可能實(shí)現(xiàn)方式中所帶來的技術(shù)效果可參見上述第一方面所帶來的技術(shù)效果,此處不在贅述。
20、本公開第四方面提供一種計(jì)算機(jī)存儲(chǔ)介質(zhì),所述計(jì)算機(jī)存儲(chǔ)介質(zhì)上存儲(chǔ)有計(jì)算機(jī)程序,所述計(jì)算機(jī)程序被處理器執(zhí)行時(shí)實(shí)現(xiàn)如第一方面所述的基于c-v2x的汽車哨兵監(jiān)控方法。
21、第四方面任一種可能實(shí)現(xiàn)方式中所帶來的技術(shù)效果可參見上述第一方面所帶來的技術(shù)效果,此處不在贅述。
22、與現(xiàn)有技術(shù)相比,本公開具有如下優(yōu)點(diǎn):
23、1、分析周邊車輛的行駛軌跡趨勢(shì),預(yù)測(cè)可能的碰撞風(fēng)險(xiǎn),進(jìn)而觸發(fā)哨兵模式進(jìn)行精準(zhǔn)監(jiān)測(cè)。
24、2、通過c-v2x迅速向周邊車輛、基礎(chǔ)設(shè)施及行人設(shè)備發(fā)送警報(bào),共同采取應(yīng)對(duì)措施,實(shí)現(xiàn)協(xié)同安全防護(hù)。
25、3、車輛將實(shí)時(shí)數(shù)據(jù)上傳至云端,用戶可通過移動(dòng)終端隨時(shí)查看車輛狀態(tài),同時(shí)云端的智能算法可對(duì)數(shù)據(jù)進(jìn)行分析,為后續(xù)的安全決策提供依據(jù)。
26、本公開的其它特征和優(yōu)點(diǎn)將在隨后的說明書中闡述,并且,部分地從說明書中變得顯而易見,或者通過實(shí)施本公開而了解。本公開的目的和其他優(yōu)點(diǎn)可通過在說明書、權(quán)利要求書以及附圖中所指出的結(jié)構(gòu)來實(shí)現(xiàn)和獲得。
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!