車輛扭矩調節方法、裝置、電子設備和存儲介質與流程
本申請涉及車輛控制,特別是涉及一種車輛扭矩調節方法、裝置、電子設備和存儲介質。
背景技術:
1、目前在車輛的上坡或下坡工況中,車輛的速度由駕駛員控制,也就是說車輛的扭矩控制主要依賴于駕駛員的操作,而人為扭矩調整的精度不高,會導致車速不穩定,可能出現駕駛員判斷不正確導致的車速過低或過高,從而導致頻繁制動或換擋,造成能量浪費,且影響行車安全性。
2、需要說明的是,上述的陳述僅用于提供與本申請有關的背景技術信息,而不必然的構成現有技術。
技術實現思路
1、有鑒于此,本申請的目的在于提出一種車輛扭矩調節方法、裝置、電子設備和存儲介質,本申請能夠針對性的解決現有車輛的上下坡扭矩調節精度不高的問題。
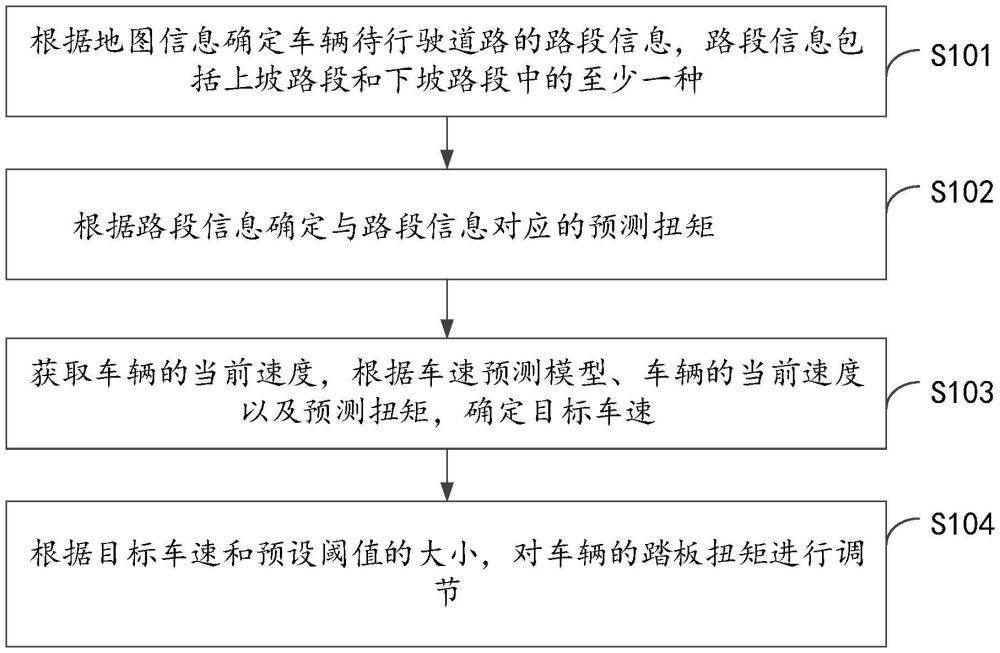
2、基于上述目的,第一方面,本申請提出了一種車輛扭矩調節方法,包括:根據地圖信息確定車輛待行駛道路的路段信息,所述路段信息包括上坡路段和下坡路段中的至少一種;根據所述路段信息確定與所述路段信息對應的預測扭矩;獲取車輛的當前速度,根據車速預測模型、所述車輛的當前速度以及所述預測扭矩,確定目標車速;根據所述目標車速和預設閾值的大小,對所述車輛的踏板扭矩進行調節。
3、可選地,根據所述路段信息確定與各路段信息對應的預測扭矩,包括:根據所述路段信息包括上坡路段,確定所述預測扭矩為第一預測扭矩,所述第一預測扭矩為車輛的最大扭矩;根據所述路段信息包括下坡路段,確定所述預測扭矩為第二預測扭矩,所述第二預測扭矩為零。
4、可選地,所述車速預測模型表征車輛的速度、扭矩以及動力學參數之間的關系,所述根據車速預測模型、所述車輛的當前速度以及所述預測扭矩,確定目標車速,包括:對于所述上坡路段,根據所述車速預測模型、所述車輛的當前速度以及所述第一預測扭矩,得到第一預測車速;根據所述第一預測車速與所述當前車速的大小,確定第一目標車速;對于所述下坡路段,根據所述車速預測模型、所述車輛的當前速度以及所述第二預測扭矩,得到第二預測車速;根據所述第二預測車速與所述當前車速的大小,確定第二目標車速。
5、可選地,所述根據所述第一預測車速與所述當前車速的大小,確定第一目標車速,包括:根據所述第一預測車速大于所述當前車速,確定所述第一目標車速為所述當前車速;根據所述第一預測車速小于或等于所述當前車速,確定所述第一目標車速為所述第一預測車速。
6、可選地,所述根據所述第二預測車速與所述當前車速的大小,確定第二目標車速,包括:根據所述第二預測車速小于所述當前車速,確定所述第二目標車速為所述當前車速;根據所述第二預測車速大于或等于所述當前車速,確定所述第二目標車速為所述第二預測車速。
7、可選地,所述預設閾值包括對應于上坡路段的第一預設閾值和對應于下坡路段的第二預設閾值;根據所述目標車速和預設閾值的大小,對所述車輛的踏板扭矩進行調節,包括:對于所述上坡路段,根據目標車速小于所述第一預設閾值,增加所述車輛的踏板扭矩線性斜率,為車輛的踏板扭矩增加第一修正值,得到修正后的車輛的踏板扭矩;對于所述下坡路段,根據目標車速大于所述第二預設閾值,減小所述車輛的踏板扭矩線性斜率,為車輛的踏板扭矩減小第二修正值,得到修正后的車輛的踏板扭矩。
8、可選地,所述方法還包括:根據車輛的歷史坡度行駛數據,確定踏板扭矩線性斜率變化量,所述踏板扭矩線性斜率變化量用于控制所述車輛的踏板扭矩線性斜率的增加量,或者控制所述車輛的踏板扭矩線性斜率的減小量。
9、第二方面,還提供了一種車輛扭矩調節裝置,包括:路段識別模塊,用于根據地圖信息確定車輛待行駛道路的路段信息,所述路段信息包括上坡路段和下坡路段中的至少一種;第一處理模塊,用于根據所述路段信息確定與所述路段信息對應的預測扭矩;第二處理模塊,用于獲取車輛的當前速度,根據車速預測模型、所述車輛的當前速度以及所述預測扭矩,確定目標車速;調節模塊,用于根據所述目標車速和預設閾值的大小,對所述車輛的踏板扭矩進行調節。
10、第三方面,還提供了一種電子設備,包括存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運行的計算機程序,所述處理器運行所述計算機程序以實現第一方面所述的方法。
11、第四方面,還提供了一種計算機可讀存儲介質,其上存儲有計算機程序,所述程序被處理器執行實現第一方面任一項所述的方法。
12、總的來說,本申請至少存在以下有益效果:
13、本申請實施例提供一種車輛扭矩調節方法,通過地圖信息來確定車輛待行駛道路的路段信息,路段信息包括上坡路段和下坡路段中的至少一種,可快速識別車輛前方是上坡還是下坡,進而根據不同的路段信息確定與路段信息對應的預測扭矩;并基于車速預測模型、車輛的當前速度以及預測扭矩,確定目標車速,可提高車輛速度的控制精度,根據目標車速和預設閾值的大小,對車輛的踏板扭矩進行調節,使得車輛在上坡或下坡時,輸出按照本實施例調節后的扭矩,且按照目標車速行駛,通過精準的車速控制,可減少因車速過高或過低導致的駕駛風險,且通過提前預測車速變化,確保車輛在不同路段的行駛速度更加穩定,避免在下坡時因車速過高而頻繁使用制動,減少能量浪費。
14、上述說明僅是本申請技術方案的概述,為了能夠更清楚了解本申請的技術手段,而可依照說明書的內容予以實施,并且為了讓本申請的上述和其它目的、特征和優點能夠更明顯易懂,以下特舉本申請的具體實施方式。
技術特征:
1.一種車輛扭矩調節方法,其特征在于,所述方法包括:
2.根據權利要求1所述的方法,其特征在于,根據所述路段信息確定與各路段信息對應的預測扭矩,包括:
3.根據權利要求2所述的方法,其特征在于,所述車速預測模型表征車輛的速度、扭矩以及動力學參數之間的關系,所述根據車速預測模型、所述車輛的當前速度以及所述預測扭矩,確定目標車速,包括:
4.根據權利要求3所述的方法,其特征在于,所述根據所述第一預測車速與所述當前車速的大小,確定第一目標車速,包括:
5.根據權利要求3所述的方法,其特征在于,所述根據所述第二預測車速與所述當前車速的大小,確定第二目標車速,包括:
6.根據權利要求1所述的方法,其特征在于,所述預設閾值包括對應于上坡路段的第一預設閾值和對應于下坡路段的第二預設閾值;根據所述目標車速和預設閾值的大小,對所述車輛的踏板扭矩進行調節,包括:
7.根據權利要求6所述的方法,其特征在于,所述方法還包括:
8.一種車輛扭矩調節裝置,其特征在于,包括:
9.一種電子設備,其特征在于,包括存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運行的計算機程序,所述處理器運行所述計算機程序以實現如權利要求1-7任一項所述的方法。
10.一種計算機可讀存儲介質,其上存儲有計算機程序,其特征在于,所述程序被處理器執行實現如權利要求1-7中任一項所述的方法。
技術總結
本申請提供一種車輛扭矩調節方法、裝置、電子設備和存儲介質,涉及車輛控制技術領域。包括:根據地圖信息確定車輛待行駛道路的路段信息,所述路段信息包括上坡路段和下坡路段中的至少一種;根據所述路段信息確定與所述路段信息對應的預測扭矩;獲取車輛的當前速度,根據車速預測模型、所述車輛的當前速度以及所述預測扭矩,確定目標車速;根據所述目標車速和預設閾值的大小,對所述車輛的踏板扭矩進行調節。本申請能夠針對性的解決現有車輛的上下坡扭矩調節精度不高的問題。
技術研發人員:熊嘉偉,黃倩倩,張葉,付文杰
受保護的技術使用者:濰柴動力股份有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!