用于車輛的控制方法、裝置、車輛及存儲介質與流程
本申請涉及車輛,具體涉及一種用于車輛的控制方法、裝置、車輛及存儲介質。
背景技術:
1、隨著汽車駕駛速度的不斷提升,對于汽車安全性要求越來越高。常見的車輛例如輪式起重機目前多采用電控轉向方式,電控轉向方式可有效降低由于固定轉向傳動比所引起的車速對汽車轉向特性的影響,提高車輛的操縱穩定性和主動安全性。然而,現有輪式起重機具有重量大、行駛工況多模式、轉向機構復雜、多軸多模式轉向等特點,施工場地多為山地及低風速區域,施工條件復雜,易出現轉向磨損等故障。現有轉向技術中只考慮采用轉向、車速等因素,未考慮到車輛的不同行駛工況和懸掛高度誤差等因素,導致車輛的轉向控制系統控制轉向時易出現較大偏差。
技術實現思路
1、本申請實施例的目的是提供一種用于車輛的控制方法、裝置、車輛及存儲介質,用以解決現有技術中未考慮到車輛的不同行駛工況和懸掛高度誤差等因素,導致車輛轉向時易出現較大偏差的技術缺陷。
2、為了實現上述目的,本申請第一方面提供一種用于車輛的控制方法,車輛包括底盤,底盤包括主行走輪和從行走輪,主行走輪包括車橋,從行走輪包括電控橋,控制方法包括:
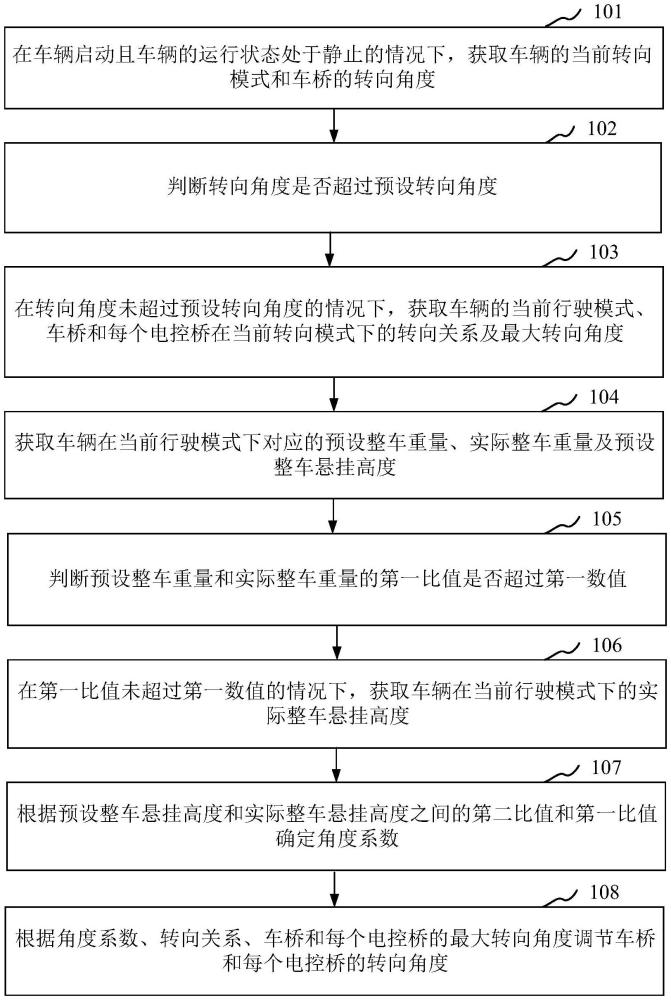
3、在車輛啟動且車輛的運行狀態處于靜止的情況下,獲取車輛的當前轉向模式和車橋的轉向角度;
4、判斷轉向角度是否超過預設轉向角度;
5、在轉向角度未超過預設轉向角度的情況下,獲取車輛的當前行駛模式、車橋和每個電控橋在當前轉向模式下的轉向關系及最大轉向角度;
6、獲取車輛在當前行駛模式下對應的預設整車重量、實際整車重量及預設整車懸掛高度;
7、判斷預設整車重量和實際整車重量之間的第一比值是否超過第一數值;
8、在第一比值未超過第一數值的情況下,獲取車輛在當前行駛模式下的實際整車懸掛高度;
9、根據預設整車懸掛高度和實際整車懸掛高度之間的第二比值和第一比值確定角度系數;
10、根據角度系數、轉向關系、車橋和每個電控橋的最大轉向角度調節車橋和每個電控橋的轉向角度。
11、在本申請的實施例中,根據預設整車懸掛高度和實際整車懸掛高度之間的第二比值和第一比值確定角度系數包括:判斷預設整車懸掛高度和實際整車懸掛高度之間的第二比值是否超過第二數值;在第二比值超過第二數值的情況下,根據第一比值和第二比值之間的第一關系式確定角度系數;在第二比值未超過第二數值的情況下,根據第一比值和第二比值之間的第二關系式確定角度系數。
12、在本申請的實施例中,第一關系式和第二關系式分別為公式(1)和公式(2)所示:
13、
14、其中,β為角度系數,a1、a2、b1、b2為常數,x1為第一比值,x2為第二比值。
15、在本申請的實施例中,根據角度系數、轉向關系、車橋和每個電控橋的最大轉向角度調節車橋和每個電控橋的轉向角度包括:根據角度系數分別與車橋和每個電控橋的最大轉向角度之間的乘積及轉向關系調節車橋和每個電控橋的轉向角度。
16、在本申請的實施例中,控制方法還包括:在轉向角度超過預設轉向角度的情況下,確定車輛無法執行當前轉向模式,并進行報警。
17、在本申請的實施例中,控制方法還包括:在第一比值超過第一數值的情況下,確定車輛過載,并進行報警。
18、本申請第二方面提供一種用于車輛的控制裝置,包括:
19、存儲器,被配置成存儲指令;
20、控制器,被配置成從所述存儲器調用所述指令以及在執行所述指令時能夠實現上述的用于車輛的控制方法。
21、本申請第三方面提供一種車輛,包括:
22、底盤,底盤包括主行走輪和從行走輪,主行走輪包括車橋,從行走輪包括電控橋;
23、上述的用于車輛的控制裝置。
24、在本申請的實施例中,車橋安裝有角度傳感器,角度傳感器用于采集車橋的轉向角度,底盤安裝有懸掛檢測裝置,懸掛檢測裝置用于采集車輛的實際整車懸掛高度。
25、本申請第四方面提供一種機器可讀存儲介質,該機器可讀存儲介質上存儲有指令,該指令在被控制器執行時使得所述控制器被配置成執行上述的用于車輛的控制方法。
26、上述技術方案,通過在車輛啟動且車輛的運行狀態處于靜止的情況下,獲取車輛的當前轉向模式和車橋的轉向角度;判斷轉向角度是否超過預設轉向角度;在轉向角度未超過預設轉向角度的情況下,獲取車輛的當前行駛模式、車橋和每個電控橋在當前轉向模式下的轉向關系及最大轉向角度;獲取車輛在當前行駛模式下對應的預設整車重量、實際整車重量及預設整車懸掛高度;判斷預設整車重量和實際整車重量之間的第一比值是否超過第一數值;在第一比值未超過第一數值的情況下,獲取車輛在當前行駛模式下的實際整車懸掛高度;根據預設整車懸掛高度和實際整車懸掛高度之間的第二比值和第一比值確定角度系數;根據角度系數、轉向關系、車橋和每個電控橋的最大轉向角度調節車橋和每個電控橋的轉向角度。本方法基于行駛模式和整車重量以及整車懸掛位置實現了轉向的精準控制,有效提高了車輛行駛的安全性。
27、本申請實施例的其他特征和優點將在隨后的具體實施方式部分予以詳細說明。
技術特征:
1.一種用于車輛的控制方法,其特征在于,所述車輛包括底盤,所述底盤包括主行走輪和從行走輪,所述主行走輪包括車橋,所述從行走輪包括電控橋,所述控制方法包括:
2.根據權利要求1所述的用于車輛的控制方法,其特征在于,所述根據所述預設整車懸掛高度和所述實際整車懸掛高度之間的第二比值和所述第一比值確定角度系數包括:
3.根據權利要求2所述的用于車輛的控制方法,其特征在于,所述第一關系式和所述第二關系式分別為公式(1)和公式(2)所示:
4.根據權利要求1所述的用于車輛的控制方法,其特征在于,所述根據所述角度系數、所述轉向關系、所述車橋和所述每個電控橋的最大轉向角度調節所述車橋和所述每個電控橋的轉向角度包括:
5.根據權利要求1所述的用于車輛的控制方法,其特征在于,所述控制方法還包括:
6.根據權利要求1所述的用于車輛的控制方法,其特征在于,所述控制方法還包括:
7.一種用于車輛的控制裝置,其特征在于,包括:
8.一種車輛,其特征在于,包括:
9.根據權利要求8所述的車輛,其特征在于,所述車橋安裝有角度傳感器,所述角度傳感器用于采集所述車橋的轉向角度,所述底盤安裝有懸掛檢測裝置,所述懸掛檢測裝置用于采集所述車輛的實際整車懸掛高度。
10.一種機器可讀存儲介質,該機器可讀存儲介質上存儲有指令,其特征在于,該指令在被控制器執行時使得所述控制器被配置成執行根據權利要求1至6中任一項所述的用于車輛的控制方法。
技術總結
本申請實施例提供一種用于車輛的控制方法、裝置、車輛及存儲介質。控制方法包括:在車輛啟動且車輛的運行狀態處于靜止時,獲取車輛的當前轉向模式和車橋的轉向角度;若轉向角度未超過預設轉向角度,獲取車輛的當前行駛模式、車橋和每個電控橋在當前轉向模式下的轉向關系及最大轉向角度;獲取車輛在當前行駛模式下對應的預設整車重量、實際整車重量及預設整車懸掛高度;若預設整車重量和實際整車重量之間的第一比值未超過第一數值,獲取車輛的實際整車懸掛高度;根據預設整車懸掛高度和實際整車懸掛高度之間的第二比值和第一比值確定角度系數;根據角度系數、轉向關系、車橋和每個電控橋的最大轉向角度調節車橋和每個電控橋的轉向角度。
技術研發人員:方杰平,周丹,歐華,劉宇新,高曼,林小珍
受保護的技術使用者:中聯重科股份有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!