一種電動共軸雙旋翼集成驅動裝置的制作方法
本發明涉及航空器設計制造,特別提供了一種電動共軸雙旋翼集成驅動裝置。
背景技術:
1、現有的電動無人直升機/旋翼機驅動裝置,一般是指用電動機作為動力源,為直升機提供升力和推進力,存在結構復雜,能耗高,續航能力差等缺陷。
2、電動無人直升機/旋翼機上的旋翼大部分采用單對/多對對轉雙槳。這是因為單個槳葉的設計會使飛機因旋翼旋轉產生的反向扭轉力矩而反向轉動,單個槳葉的設計需通過尾槳配平這種反轉力矩,所以多旋翼無人機多采用對轉的雙槳抵消互相的反轉力矩,這樣能大大簡化電動無人直升機/旋翼機的結構,同時提高了有效載荷。
3、目前國內、外所采用的電驅動雙螺旋槳裝置主要有三類:
4、由兩臺獨立電機拖動兩組槳葉異向旋轉,這種驅動方式原理比較簡單,但傳動系統成本較高,且體積、重量較大。目前此類驅動裝置在大型船舶推進系統中廣泛使用。
5、由單臺電機通過復雜的行星齒輪傳動系統拖動對轉槳葉旋轉其復雜的齒輪減速器傳動系統既要實現機械減速,又要完成從一個機械口輸入到兩個機械口輸出的“機械裂變”,然后通過內、外推進軸直接帶動對轉螺旋槳旋轉,導致其機械傳動部分比較復雜,且機械傳動效率較低。
6、采用特殊結構的永磁電動機,實現單端雙軸同心式輸出,但是都用于較大的水下推進螺旋槳中,體積較大,不適合用于較小尺寸的多旋翼無人機中。
技術實現思路
1、本申請的目的在于為了提高電能的利用率,簡化驅動裝置,提高驅動裝置的功率重量比,進一步增加電動無人直升機/旋翼機的有效載荷,提出的一種功率密度高、控制簡便、體積小重量輕的驅動裝置。
2、為了實現上述目的,本發明采用如下技術方案:一種電動共軸雙旋翼集成驅動裝置,所述裝置包括共軸對轉永磁同步電機、用于驅動所述共軸對轉永磁同步電機運轉的電機驅動模塊以及安裝在所述共軸對轉永磁同步電機的輸出軸上的兩組槳葉,
3、所述共軸對轉永磁同步電機設有兩個同側的輸出軸,兩個輸出軸間套設,兩個輸出軸的旋轉方向相反,
4、所述兩組槳葉分別安裝在兩個輸出軸上。
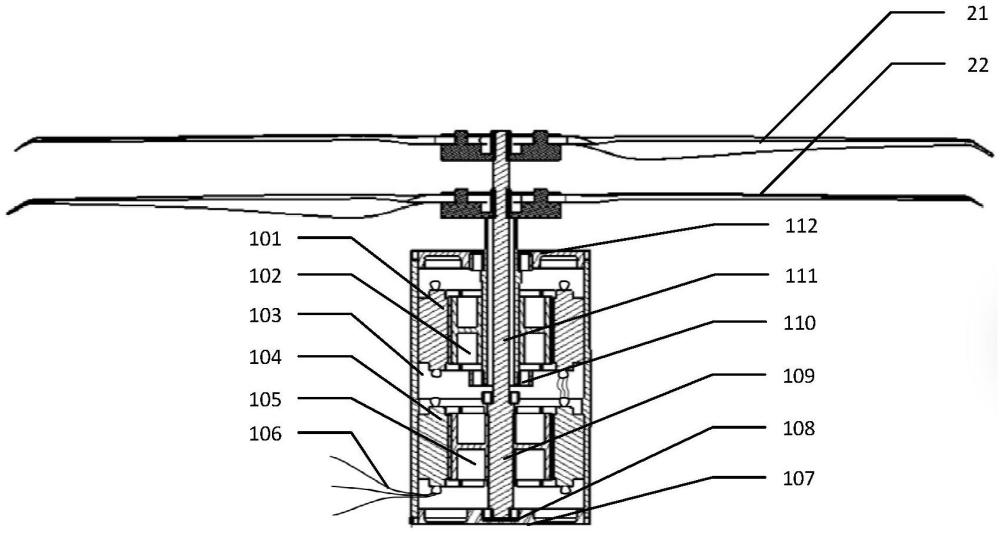
5、本發明所提供的電動共軸雙旋翼集成驅動裝置,還具有這樣的技術特征,所述共軸對轉永磁同步電機包括機殼、設置在機殼內的上定轉子組件、設置在機殼內的下定轉子組件、用于將上定轉子組件固定在機殼內的空心軸軸承、用于將下定轉子組件固定在機殼內的實心軸軸承、機殼上端蓋以及機殼后端蓋。
6、本發明所提供的電動共軸雙旋翼集成驅動裝置,還具有這樣的技術特征,所述上定轉子組件包括上定子、上永磁轉子和空心軸,所述下定轉子組件包括下定子、下永磁轉子和實心軸,所述空心軸和所述實心軸同心,所述空心軸和所述實心軸作為所述共軸對轉永磁同步電機的輸出軸。
7、本發明所提供的電動共軸雙旋翼集成驅動裝置,還具有這樣的技術特征,所述上定子和所述下定子中的線圈串聯連接,并相序相反。
8、本發明所提供的電動共軸雙旋翼集成驅動裝置,還具有這樣的技術特征,若下定子的三相繞組為a1,b1,c1;上定子的三相繞組為a2,b2,c2;as,bs,cs為繞組每相始端;af,bf,cf為繞組每相末端,則,始端as,bs,cs分別連接a1+,b1+,c1+,a1-連接a2+,b1-連接c2+,c1-連接b2+,末端af,bf,cf短接在一起。
9、本發明所提供的電動共軸雙旋翼集成驅動裝置,還具有這樣的技術特征,通過無傳感器控制方法分別在上定子線圈和下定子線圈中產生兩個反向相反的旋轉磁場,分別驅動上永磁轉子和下永磁轉子旋轉,二者轉速相同。
10、有益效果
11、本發明所提出的電動共軸雙旋翼集成驅動裝置,該裝置將雙出軸電機的兩個轉子和定子集成在一個殼體里,連接下永磁轉子的實心軸從連接上永磁轉子的空心軸中穿過,實現了同側共軸雙出的結構,上下定子繞組采用串聯結構,繞組相續相反,通入同一組交流電實現反向旋轉。上下定子繞組只需要一個交流驅動器。電機驅動采用無傳感器控制方法,通過電流判斷轉子位置,不需要采用額外的位置傳感器。控制時以一個轉子的位置作為控制參考,另一個轉子自由跟隨運行。旋翼的載荷主要受轉速的影響,轉速更高旋翼載荷更大,這種特性使上述自由跟隨的控制方案更易實施,不易產生失步的情況。共軸反轉的特點能夠簡化多旋翼無人機共軸雙旋翼動力系統的結構,功率體積比大,功率密度高,提升電動多旋翼無人機的有效載荷,控制簡便,可靠性高且易于實現。因為自身結構簡單集成度高,且能自平衡反扭矩,多旋翼無人機可以匹配單套或者多套共軸雙旋翼動力裝置,總體結構布局更方便。
12、本發明所提供的電動共軸雙旋翼集成驅動裝置功率體積比大,功率密度高,結構簡單,控制簡便,能夠有效提升電動多旋翼無人機的有效載荷,可靠性高且易于實現。因為自身結構簡單集成度高,且能自平衡反扭矩,多旋翼無人機可以匹配單套或者多套共軸雙旋翼動力裝置,總體結構布局更方便。
技術特征:
1.一種電動共軸雙旋翼集成驅動裝置,其特征在于,所述裝置包括共軸對轉永磁同步電機、用于驅動所述共軸對轉永磁同步電機運轉的電機驅動模塊以及安裝在所述共軸對轉永磁同步電機的輸出軸上的兩組槳葉,
2.根據權利要求1所述的電動共軸雙旋翼集成驅動裝置,其特征在于,所述共軸對轉永磁同步電機包括機殼、設置在機殼內的上定轉子組件、設置在機殼內的下定轉子組件、用于將上定轉子組件固定在機殼內的空心軸軸承、用于將下定轉子組件固定在機殼內的實心軸軸承、機殼上端蓋以及機殼后端蓋。
3.根據權利要求2所述的電動共軸雙旋翼集成驅動裝置,其特征在于,所述上定轉子組件包括上定子、上永磁轉子和空心軸,所述下定轉子組件包括下定子、下永磁轉子和實心軸,所述空心軸和所述實心軸同心,所述空心軸和所述實心軸作為所述共軸對轉永磁同步電機的輸出軸。
4.根據權利要求3所述的電動共軸雙旋翼集成驅動裝置,其特征在于,所述上定子和所述下定子中的線圈串聯連接,并相序相反。
5.根據權利要求4所述的電動共軸雙旋翼集成驅動裝置,其特征在于,若下定子的三相繞組為a1,b1,c1;上定子的三相繞組為a2,b2,c2;as,bs,cs為繞組每相始端;af,bf,cf為繞組每相末端,則,始端as,bs,cs分別連接a1+,b1+,c1+,a1-連接a2+,b1-連接c2+,c1-連接b2+,末端af,bf,cf短接在一起。
6.根據權利要求4所述的電動共軸雙旋翼集成驅動裝置,其特征在于,通過無傳感器控制方法分別在上定子線圈和下定子線圈中產生兩個反向相反的旋轉磁場,分別驅動上永磁轉子和下永磁轉子旋轉,二者轉速相同。
技術總結
本申請提供了一種電動共軸雙旋翼集成驅動裝置,涉及航空器設計制造技術領域,所述裝置包括共軸對轉永磁同步電機、用于驅動所述共軸對轉永磁同步電機運轉的電機驅動模塊以及安裝在所述共軸對轉永磁同步電機的輸出軸上的兩組槳葉,所述共軸對轉永磁同步電機設有兩個同側的輸出軸,兩個輸出軸間套設,兩個輸出軸的旋轉方向相反,所述兩組槳葉分別安裝在兩個輸出軸上。該裝置功率體積比大,功率密度高,結構簡單,控制簡便,能夠有效提升電動多旋翼無人機的有效載荷,可靠性高且易于實現。因為自身結構簡單集成度高,且能自平衡反扭矩,多旋翼無人機可以匹配單套或者多套共軸雙旋翼動力裝置,總體結構布局更方便。
技術研發人員:莫勝波,祁劍雄,呂佳,金海俊,蔡興濤
受保護的技術使用者:蘭州飛行控制有限責任公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!