一種無人機用減震型支撐架的制作方法
本技術涉及無人機,具體為一種無人機用減震型支撐架。
背景技術:
1、無人駕駛飛機簡稱無人機,英文縮寫為uav,是利用無線電遙控設備和自備的程序控制裝置操縱的不載人飛機,或者由車載計算機完全地或間歇地自主地操作。
2、無人機底端均會設有支架,支架與無人機一般為剛性連接,剛性連接導致支架降落在地面上時,其落地的震動力會傳導到無人機主體上,影響無人機的使用壽命,且隨著使用時間的增加,支架與無人機的連接處也可能會出現松動的情況。
3、為此,為了解決上述問題,本實用新型提出了一種無人機用減震型支撐架。
技術實現思路
1、本實用新型的目的在于提供一種無人機用減震型支撐架,以解決上述背景技術中提出的問題。
2、為實現上述目的,本實用新型提供如下技術方案:一種無人機用減震型支撐架,包括機體,所述機體底端固定連接有對稱設置的多個立塊,多個所述立塊之間均轉動連接有轉動桿,兩個所述轉動桿外壁均固定連接有支架,多個所述立塊的相遠離面均固定連接有阻擋塊,兩個所述轉動桿對應阻擋塊位置處均固定連接有方形塊,兩個所述轉動桿外壁均固定連接有傳動齒輪,所述機體兩側壁均固定連接有支撐板,兩個所述支撐板均轉動連接有調節絲桿,兩個所述支撐板均滑動連接有對稱設置的限位桿,所述限位桿底端均共同固定連接有調節板,兩個所述調節板均滑動連接有對稱設置的連接桿,所述連接桿底端均共同固定連接有升降板,所述升降板頂端對應連接桿位置處均固定連接有彈簧,所述升降板底端均固定連接有對稱設置的傳動齒條。
3、優選的,所述調節絲桿位于調節板中間位置處,且所述調節絲桿與調節板螺紋連接。
4、優選的,兩個所述連接桿均位于彈簧的中空位置處,且所述彈簧的頂端均與調節板底端固定連接。
5、優選的,所述傳動齒條均與傳動齒輪嚙合連接。
6、優選的,所述調節絲桿的頂端均固定連接有握把,所述握把具體形狀均為圓形設置。
7、與現有技術相比,本實用新型的有益效果是:設置了傳動齒輪、傳動齒條、調節螺栓與彈簧等等,在無人機主體底端的支架落地時,落地的震動力會使傳動齒輪轉動,傳動齒輪的轉動會使各機構進行連動,使得升降板對彈簧進行擠壓,彈簧收縮與彈出的過程可將支架落地的力從剛性轉化為柔性,防止剛性震動力全部轉移到無人機主體上,可穩定提升無人機主體的使用壽命,也可防止支架與無人機主體連接處出現松動情況,且可通過調節螺栓去調節調節板與彈簧的位置,從而達到調節減震力度目的。
技術特征:
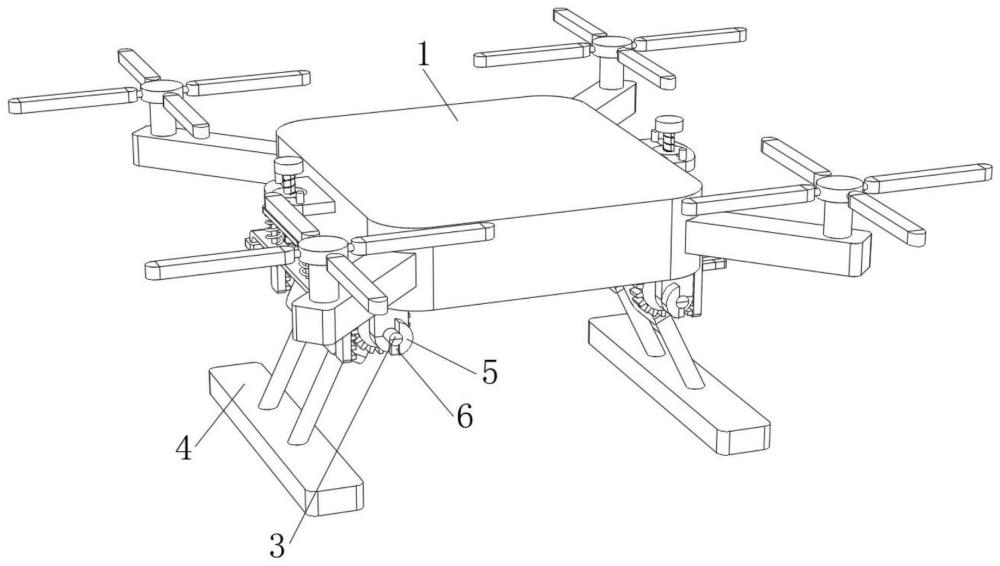
1.一種無人機用減震型支撐架,其特征在于,包括機體(1),所述機體(1)底端固定連接有對稱設置的多個立塊(2),多個所述立塊(2)之間均轉動連接有轉動桿(3),兩個所述轉動桿(3)外壁均固定連接有支架(4),多個所述立塊(2)的相遠離面均固定連接有阻擋塊(5),兩個所述轉動桿(3)對應阻擋塊(5)位置處均固定連接有方形塊(6),兩個所述轉動桿(3)外壁均固定連接有傳動齒輪(7),所述機體(1)兩側壁均固定連接有支撐板(8),兩個所述支撐板(8)均轉動連接有調節絲桿(9),兩個所述支撐板(8)均滑動連接有對稱設置的限位桿(10),所述限位桿(10)底端均共同固定連接有調節板(11),兩個所述調節板(11)均滑動連接有對稱設置的連接桿(12),所述連接桿(12)底端均共同固定連接有升降板(13),所述升降板(13)頂端對應連接桿(12)位置處均固定連接有彈簧(14),所述升降板(13)底端均固定連接有對稱設置的傳動齒條(15)。
2.根據權利要求1所述的一種無人機用減震型支撐架,其特征在于:所述調節絲桿(9)位于調節板(11)中間位置處,且所述調節絲桿(9)與調節板(11)螺紋連接。
3.根據權利要求1所述的一種無人機用減震型支撐架,其特征在于:兩個所述連接桿(12)均位于彈簧(14)的中空位置處,且所述彈簧(14)的頂端均與調節板(11)底端固定連接。
4.根據權利要求1所述的一種無人機用減震型支撐架,其特征在于:所述傳動齒條(15)均與傳動齒輪(7)嚙合連接。
5.根據權利要求1所述的一種無人機用減震型支撐架,其特征在于:所述調節絲桿(9)的頂端均固定連接有握把(16),所述握把(16)具體形狀均為圓形設置。
技術總結
本技術公布了一種無人機用減震型支撐架,包括機體,所述機體底端固定連接有對稱設置的多個立塊,多個所述立塊之間均轉動連接有轉動桿,兩個所述轉動桿外壁均固定連接有支架,多個所述立塊的相遠離面均固定連接有阻擋塊,兩個所述轉動桿對應阻擋塊位置處均固定連接有方形塊,兩個所述轉動桿外壁均固定連接有傳動齒輪,所述機體兩側壁均固定連接有支撐板,兩個所述支撐板均轉動連接有調節絲桿,兩個所述支撐板均滑動連接有對稱設置的限位桿,所述限位桿底端均共同固定連接有調節板,兩個所述調節板均滑動連接有對稱設置的連接桿,本技術的有益效果是:可穩定提升無人機主體的使用壽命,且便于調節支架的減震力度。
技術研發人員:梁合,薛永江,魏崢嶸,郭猛超
受保護的技術使用者:陜西瑞格機械制造有限公司
技術研發日:20240428
技術公布日:2025/3/20
- 還沒有人留言評論。精彩留言會獲得點贊!