一種異形雙索構(gòu)造吊裝系統(tǒng)及吊裝方法與流程
本發(fā)明涉及雙索纜索吊機(jī),特別涉及一種異形雙索構(gòu)造吊裝系統(tǒng)及吊裝方法。
背景技術(shù):
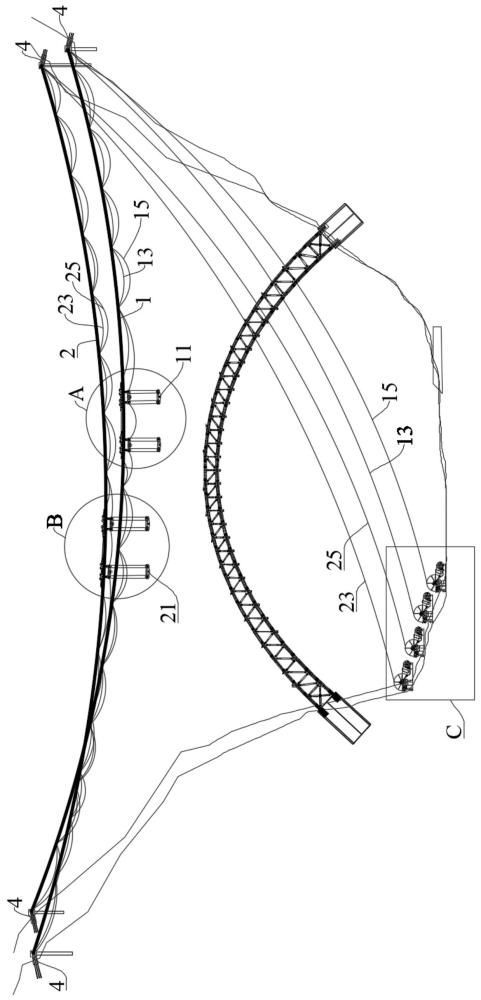
1、在建設(shè)跨越峽谷的橋梁時(shí),為實(shí)現(xiàn)施工材料及設(shè)備的轉(zhuǎn)運(yùn),工程師們選擇在待建橋梁上方布置雙索纜索吊機(jī)系統(tǒng);雙索纜索吊機(jī)系統(tǒng)包括兩根纜索,以及分別滑行于兩根纜索的至少兩個(gè)吊車(chē),纜索的兩端分別固定于峽谷兩岸的纜塔或地錨上,其中部在重力影響下下垂,形成類(lèi)似懸鏈線的形狀,吊車(chē)沿纜索滑行以將與其相連的貨物移動(dòng)至目標(biāo)區(qū)域。
2、現(xiàn)有技術(shù)中,兩根纜索通常對(duì)稱(chēng)設(shè)置于同一豎向平面,這就使得兩根纜索兩端的共計(jì)四個(gè)固定位置需要等高和成矩形分布,為實(shí)現(xiàn)等高,通常的做法是設(shè)置不同高度的纜塔,由纜塔調(diào)平各固定位置點(diǎn)的高度;但是,在復(fù)雜陡峭的地形條件下,修建纜塔需大面積開(kāi)挖山體來(lái)施工纜塔基礎(chǔ),施工成本高昂;且在陡峭地形條件下,纜塔上部距離坡面近,導(dǎo)致纜塔至坡面區(qū)域的邊跨纜索跨度小,不利于纜索吊機(jī)吊重和吊裝安全;部分工況下,由于坡面變化復(fù)雜,兩組纜索錨固結(jié)構(gòu)位置的高差大可能使其中一組的錨固結(jié)構(gòu)修建高度大,極大地提高修建難度、施工成本。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明的目的在于克服背景技術(shù)中所存在的現(xiàn)有的對(duì)稱(chēng)式雙索纜索吊機(jī)系統(tǒng)在復(fù)雜陡峭的地形條件下,施工成本高且困難的問(wèn)題,提供一種異形雙索構(gòu)造吊裝系統(tǒng)及吊裝方法。
2、在第一方面,本發(fā)明提供一種異形雙索構(gòu)造吊裝系統(tǒng),包括兩端固定且中部下垂的第一承重繩和第二承重繩,所述第一承重繩具有第一索形參數(shù),所述第二承重繩具有與所述第一索形參數(shù)不同的第二索形參數(shù);
3、所述第一承重繩所在的豎平面與所述第二承重繩所在的豎平面平行;
4、還包括走行于所述第一承重繩的第一起重小車(chē)組,和走行于所述第二承重繩的第二起重小車(chē)組,所述第一起重小車(chē)組和第二起重小車(chē)組能夠協(xié)同吊運(yùn)。
5、本發(fā)明所述的異形雙索構(gòu)造吊裝系統(tǒng),第一承重繩和第二承重繩分別具有不同的索形參數(shù),使得在施工第一承重繩和第二承重繩時(shí),它們兩端固定位置不再需要完全等高和對(duì)稱(chēng),能夠根據(jù)地形條件進(jìn)行合理選擇,大大降低了承重繩施工難度,能夠較好解決因地形變化復(fù)雜導(dǎo)致纜塔、地錨等結(jié)構(gòu)設(shè)計(jì)、施工難度大的問(wèn)題,能夠較好適應(yīng)復(fù)雜地形;第一承重繩所在的豎平面平行于第二承重繩所在的豎平面,兩承重繩之間的間距沿承重繩長(zhǎng)度方向均等,第一起重小車(chē)組和第二起重小車(chē)組在同向走行時(shí),它們之間的橫向間距不會(huì)發(fā)生大幅度變化,能夠提高協(xié)同吊運(yùn)的橫向平穩(wěn)性,并降低起重小車(chē)組之間發(fā)生碰撞的概率。
6、優(yōu)選地,索形參數(shù)包括承重繩跨度、承重繩兩端高差和承重繩垂度。
7、進(jìn)一步優(yōu)選地,索形參數(shù)僅包括承重繩跨度、承重繩兩端高差和承重繩垂度。
8、優(yōu)選地,所述第一承重繩和第二承重繩能夠橫向平移。
9、優(yōu)選地,所述第一起重小車(chē)組包括相連接的兩個(gè)第一起重小車(chē),每個(gè)所述第一起重小車(chē)均包括上下布置且能夠相互靠近和遠(yuǎn)離的第一走行機(jī)構(gòu)和第一起吊機(jī)構(gòu),所述第一走行機(jī)構(gòu)走行于所述第一承重繩;
10、所述第二起重小車(chē)組包括相連接的兩個(gè)第二起重小車(chē);每個(gè)所述第二起重小車(chē)均包括上下布置且能夠相互靠近和遠(yuǎn)離的第二走行機(jī)構(gòu)和第二起吊機(jī)構(gòu),所述第二走行機(jī)構(gòu)走行于所述第二承重繩。
11、優(yōu)選地,還包括第一牽引設(shè)備和從所述第一牽引設(shè)備引出的第一牽引繩,所述第一牽引繩遠(yuǎn)離所述第一牽引設(shè)備的一端與所述第一走行機(jī)構(gòu)相連;所述第一承重繩端部固定位置設(shè)有第一變向滑輪,所述第一牽引繩與所述第一變向滑輪相配合。
12、優(yōu)選地,還包括第二牽引設(shè)備和從所述第二牽引設(shè)備引出的第二牽引繩,所述第二牽引繩遠(yuǎn)離所述第二牽引設(shè)備的一端與所述第二走行機(jī)構(gòu)相連;所述第二承重繩端部固定位置設(shè)有第二變向滑輪,所述第二牽引繩與所述第二變向滑輪相配合。
13、優(yōu)選地,還包括第一起吊設(shè)備和從所述第一起吊設(shè)備引出的第一起吊繩,所述第一起吊繩遠(yuǎn)離所述第一起吊設(shè)備的一端繞過(guò)所述第一走行機(jī)構(gòu)后與所述第一起吊機(jī)構(gòu)相連;所述第一承重繩端部固定位置設(shè)有第三變向滑輪,所述第一起吊繩與所述第三變向滑輪相配合。
14、優(yōu)選地,還包括第二起吊設(shè)備和從所述第二起吊設(shè)備引出的第二起吊繩,所述第二起吊繩遠(yuǎn)離所述第二起吊設(shè)備的一端繞過(guò)所述第二走行機(jī)構(gòu)后與所述第二起吊機(jī)構(gòu)相連;所述第二承重繩端部固定位置設(shè)有第四變向滑輪,所述第二起吊繩與所述第四變向滑輪相配合。
15、優(yōu)選地,所述第一走行機(jī)構(gòu)與所述第一變向滑輪之間的所述第一牽引繩懸掛于所述第一承重繩。
16、優(yōu)選地,所述第二走行機(jī)構(gòu)與所述第二變向滑輪之間的所述第二牽引繩懸掛于所述第二承重繩。
17、優(yōu)選地,所述第一走行機(jī)構(gòu)與所述第三變向滑輪之間的所述第一起吊繩懸掛于所述第一承重繩。
18、優(yōu)選地,所述第二走行機(jī)構(gòu)與所述第四變向滑輪之間的所述第二起吊繩懸掛于所述第二承重繩。
19、優(yōu)選地,所述第一起吊設(shè)備、第二起吊設(shè)備、第一牽引設(shè)備和第二牽引設(shè)備均為卷?yè)P(yáng)機(jī)。
20、優(yōu)選地,還包括控制指令系統(tǒng),所述控制指令系統(tǒng)用于控制所述第一起吊設(shè)備、第二起吊設(shè)備、第一牽引設(shè)備和第二牽引設(shè)備運(yùn)行。
21、優(yōu)選地,所述第一走行機(jī)構(gòu)、第二走行機(jī)構(gòu)、第一起吊機(jī)構(gòu)和第二起吊機(jī)構(gòu)上均設(shè)置有坐標(biāo)監(jiān)測(cè)設(shè)備,所述坐標(biāo)監(jiān)測(cè)設(shè)備用于實(shí)時(shí)監(jiān)測(cè)各機(jī)構(gòu)坐標(biāo)、位置關(guān)系,用以提供給控制指令系統(tǒng)發(fā)出調(diào)整指令。
22、在第二方面,本發(fā)明提供一種異形雙索構(gòu)造吊裝方法,基于如上所述的異形雙索構(gòu)造吊裝系統(tǒng),所述第一起吊機(jī)構(gòu)和第二起吊機(jī)構(gòu)連接同一待吊裝件;
23、包括如下步驟:
24、s1.調(diào)平所述待吊裝件,并獲取調(diào)平狀態(tài)下所述第一起吊機(jī)構(gòu)和第二起吊機(jī)構(gòu)的初始高程差δh1,以及所述第一走行機(jī)構(gòu)和第二走行機(jī)構(gòu)的初始水平間距差δl1;
25、s2.移動(dòng)所述第一起重小車(chē)組和第二起重小車(chē)組,實(shí)時(shí)獲取所述第一起吊機(jī)構(gòu)和第二起吊機(jī)構(gòu)的實(shí)時(shí)高程差δh2,以及所述第一走行機(jī)構(gòu)和第二走行機(jī)構(gòu)的實(shí)時(shí)水平間距差δl2;
26、若δh1與δh2的差值大于預(yù)設(shè)相對(duì)高程閾值,改變所述第一走行機(jī)構(gòu)和第一起吊機(jī)構(gòu)的間距,和/或,改變所述第二走行機(jī)構(gòu)和第二起吊機(jī)構(gòu)的間距,使δh1與δh2的差值小于或等于所述預(yù)設(shè)相對(duì)高程閾值;
27、若δl1與δl2的差值大于預(yù)設(shè)相對(duì)水平間距閾值,改變所述第一走行機(jī)構(gòu)和/或第二走行機(jī)構(gòu)的走行速率,使δl1與δl2的差值小于或等于所述預(yù)設(shè)相對(duì)水平間距閾值。
28、本發(fā)明所述的一種異形雙索構(gòu)造吊裝方法,基于如上所述的異形雙索構(gòu)造吊裝系統(tǒng),走行機(jī)構(gòu)和起吊機(jī)構(gòu)之間的間距可以改變,使得當(dāng)出現(xiàn)高程差時(shí),可通過(guò)改變走行機(jī)構(gòu)和起吊機(jī)構(gòu)之間的間距,從而在豎向方向上調(diào)平待吊裝件,調(diào)平方式簡(jiǎn)單高效。通過(guò)監(jiān)測(cè)實(shí)時(shí)高程差和實(shí)時(shí)水平間距差,當(dāng)實(shí)時(shí)高程差δh2與初始高程差δh1的差值超過(guò)預(yù)設(shè)相對(duì)高程閾值時(shí),通過(guò)改變一個(gè)或兩個(gè)起重小車(chē)組內(nèi)的走行機(jī)構(gòu)和起吊機(jī)構(gòu)之間的間距,來(lái)減小待吊裝件的豎向傾斜幅度;當(dāng)實(shí)時(shí)水平間距差δl2與初始水平間距差δl1的差值超過(guò)預(yù)設(shè)相對(duì)水平間距閾值時(shí),通過(guò)改變一個(gè)或兩個(gè)起重小車(chē)組的走行速率,來(lái)減小待吊裝件的水平轉(zhuǎn)動(dòng)幅度,從而實(shí)現(xiàn)待吊裝件地平穩(wěn)運(yùn)輸。
29、本發(fā)明所述的異形雙索構(gòu)造吊裝方法,為第一起重小車(chē)組和第二起重小車(chē)組在如上所述異形雙索構(gòu)造上的協(xié)同吊運(yùn)提供控制思路,利于推動(dòng)異形雙索構(gòu)造替代現(xiàn)有的等高和對(duì)稱(chēng)的雙索構(gòu)造,從而解決雙索纜索吊機(jī)系統(tǒng)施工困難、使用局限性大的問(wèn)題。
30、優(yōu)選地,基于如上所述的異形雙索構(gòu)造吊裝系統(tǒng);
31、步驟s2中:在牽引移動(dòng)所述第一起重小車(chē)組時(shí),所述第一起吊設(shè)備保持一定收放繩速率,使所述第一起吊機(jī)構(gòu)與所述第一走行機(jī)構(gòu)間距保持不變,在牽引移動(dòng)所述第二起重小車(chē)組時(shí),所述第二起吊設(shè)備保持一定的收放繩速率,使所述第二起吊機(jī)構(gòu)與所述第二走行機(jī)構(gòu)間距保持不變;
32、當(dāng)δh1與δh2的差值大于預(yù)設(shè)相對(duì)高程閾值時(shí):
33、在調(diào)整所述第一走行機(jī)構(gòu)與第一起吊機(jī)構(gòu)之間間距的情況下,改變所述第一起吊設(shè)備的收放繩速率,直至δh1與δh2的差值小于或等于所述預(yù)設(shè)相對(duì)高程閾值;
34、在調(diào)整第二走行機(jī)構(gòu)與第二起吊機(jī)構(gòu)之間的間距的情況下,改變所述第二起吊設(shè)備的收放繩速率,直至δh1與δh2的差值小于或等于所述預(yù)設(shè)相對(duì)高程閾值;
35、在調(diào)整所述第一走行機(jī)構(gòu)與第一起吊機(jī)構(gòu)之間的間距,和第二走行機(jī)構(gòu)與第二起吊機(jī)構(gòu)之間的間距的情況下,改變所述第一起吊設(shè)備和第二起吊設(shè)備的收放繩速率,直至δh1與δh2的差值小于或等于所述預(yù)設(shè)相對(duì)高程閾值;
36、當(dāng)δl1與δl2的差值大于預(yù)設(shè)相對(duì)水平間距閾值時(shí):
37、在調(diào)整所述第一走行機(jī)構(gòu)的走行速率的情況下,同步改變所述第一牽引設(shè)備和第一起吊設(shè)備的收放繩速率,直至δl1與δl2的差值小于或等于所述預(yù)設(shè)相對(duì)水平間距閾值;
38、在調(diào)整所述第二走行機(jī)構(gòu)的走行速率的情況下,同步改變所述第二牽引設(shè)備和第二起吊設(shè)備的收放繩速率,直至δl1與δl2的差值小于或等于所述預(yù)設(shè)相對(duì)水平間距閾值;
39、在調(diào)整所述第一走行機(jī)構(gòu)和第二走行機(jī)構(gòu)的走行速率的情況下,同步改變所述第一牽引設(shè)備和第一起吊設(shè)備的收放繩速率,以及同步改變所述第二牽引設(shè)備和第二起吊設(shè)備的收放繩速率,直至δl1與δl2的差值小于或等于所述預(yù)設(shè)相對(duì)水平間距閾值。
40、可以理解,由于兩組承重繩的索形不同,兩組起重小車(chē)組的爬坡角度、走行弧長(zhǎng)不同,導(dǎo)致兩組起重小車(chē)組走行過(guò)程中產(chǎn)生前后距離差,導(dǎo)致待吊裝件產(chǎn)生水平轉(zhuǎn)動(dòng);又因兩組承重繩的索形不同,隨著起重小車(chē)組走行,兩組承重繩之間高差逐漸變化,導(dǎo)致待吊裝件豎向傾斜。
41、優(yōu)選的方案中,通過(guò)控制牽引設(shè)備和起吊設(shè)備的收放繩速率,實(shí)現(xiàn)待吊裝件在豎向方向和水平方向上的調(diào)平,結(jié)構(gòu)簡(jiǎn)單、操作靈活。
42、優(yōu)選地,根據(jù)單次吊裝工況下,吊件重量、承重繩重量和空載索形參數(shù),獲得起重小車(chē)組在任意位置時(shí)承重繩的有載索形,并分別建立所述第一承重繩的第一有載索形模型,和所述第二承重繩的第二有載索形模型;
43、所述s2中:
44、根據(jù)所述第一起重小車(chē)組的初始位置、走行路程,結(jié)合所述第一有載索形模型,獲得所述第一走行機(jī)構(gòu)實(shí)時(shí)位置相對(duì)初始位置的高程變化量h21和水平位移變化量l21;
45、根據(jù)所述第二起重小車(chē)組的初始位置、走行路程,結(jié)合所述第二有載索形模型,獲得所述第二走行機(jī)構(gòu)實(shí)時(shí)位置相對(duì)初始位置的高程變化量h22和水平位移變化量l22;
46、所述第一起吊機(jī)構(gòu)和第二起吊機(jī)構(gòu)的實(shí)時(shí)高程差δh2=h22-h21+補(bǔ)正值+δh1;
47、所述第一走行機(jī)構(gòu)和第二走行機(jī)構(gòu)的實(shí)時(shí)水平間距差δl2=l22-l21+δl1;
48、所述補(bǔ)正值為所述第一起吊設(shè)備和第二起吊設(shè)備在繩索拉緊狀態(tài)下的收放繩量差值。
49、與現(xiàn)有技術(shù)相比,本發(fā)明的有益效果:
50、1.本發(fā)明所述的異形雙索構(gòu)造吊裝系統(tǒng),第一承重繩和第二承重繩分別具有不同的索形參數(shù),使得在施工第一承重繩和第二承重繩時(shí),它們兩端固定位置不再需要完全等高和對(duì)稱(chēng),能夠根據(jù)地形條件進(jìn)行合理選擇,大大降低了承重繩施工難度,能夠較好解決因地形變化復(fù)雜導(dǎo)致纜塔、地錨等結(jié)構(gòu)設(shè)計(jì)、施工難度大的問(wèn)題,能夠較好適應(yīng)復(fù)雜地形;第一承重繩所在的豎平面平行于第二承重繩所在的豎平面,兩承重繩之間的間距沿承重繩長(zhǎng)度方向均等,第一起重小車(chē)組和第二起重小車(chē)組在同向走行時(shí),它們之間的橫向間距不會(huì)發(fā)生大幅度變化,能夠提高協(xié)同吊運(yùn)的橫向平穩(wěn)性,并降低起重小車(chē)組之間發(fā)生碰撞的概率。
51、2.本發(fā)明所述的一種異形雙索構(gòu)造吊裝方法,基于如上所述的異形雙索構(gòu)造吊裝系統(tǒng),走行機(jī)構(gòu)和起吊機(jī)構(gòu)之間的間距可以改變,使得當(dāng)出現(xiàn)高程差時(shí),可通過(guò)改變走行機(jī)構(gòu)和起吊機(jī)構(gòu)之間的間距,從而在豎向方向上調(diào)平待吊裝件,調(diào)平方式簡(jiǎn)單高效。通過(guò)監(jiān)測(cè)實(shí)時(shí)高程差和實(shí)時(shí)水平間距差,當(dāng)實(shí)時(shí)高程差δh2與初始高程差δh1的差值超過(guò)預(yù)設(shè)相對(duì)高程閾值時(shí),通過(guò)改變一個(gè)或兩個(gè)起重小車(chē)組內(nèi)的走行機(jī)構(gòu)和起吊機(jī)構(gòu)之間的間距,來(lái)減小待吊裝件的豎向傾斜幅度;當(dāng)實(shí)時(shí)水平間距差δl2與初始水平間距差δl1的差值超過(guò)預(yù)設(shè)相對(duì)水平間距閾值時(shí),通過(guò)改變一個(gè)或兩個(gè)起重小車(chē)組的走行速率,來(lái)減小待吊裝件的水平轉(zhuǎn)動(dòng)幅度,從而實(shí)現(xiàn)待吊裝件地平穩(wěn)運(yùn)輸。本發(fā)明所述的異形雙索構(gòu)造吊裝方法,為第一起重小車(chē)組和第二起重小車(chē)組在如上所述異形雙索構(gòu)造上的協(xié)同吊運(yùn)提供控制思路,利于推動(dòng)異形雙索構(gòu)造替代現(xiàn)有的等高和對(duì)稱(chēng)的雙索構(gòu)造,從而解決雙索纜索吊機(jī)系統(tǒng)施工困難、使用局限性大的問(wèn)題。
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!