一種熱力管道巡檢機器人
本發明涉及巡檢裝置,具體為一種熱力管道巡檢機器人。
背景技術:
1、熱力管道,也稱為熱力管網,是屬于壓力管道的一類,其主要功能是將鍋爐生產的熱能通過蒸汽、熱水等熱媒輸送到室內用熱設備,熱力管道在架設后需要進行巡檢,以排查管道是否出現破損或堵塞,傳統巡檢方式為人工巡檢,這種方式存在勞動強度大、效率低下、易受主觀因素影響且在一些危險或復雜環境下難以實施的問題。隨著自動化技術的發展,巡檢機器人應運而生。
2、然而,現有的熱力管道巡檢機器人在功能和結構上仍存在一定局限性。例如,部分機器人在復雜地形(如存在障礙物、高低不平地面等)的通行能力較差,限制了其應用范圍,同時,在機器視覺檢測方面,一些機器人的視覺模塊視角固定或調整不便,影響了對目標的全面檢測,而且在數據處理和傳輸方面,存在不能實時高效地進行記錄、查看和上傳的問題。
技術實現思路
1、本發明的目的在于提供一種熱力管道巡檢機器人,以解決上述背景技術中提出的問題。
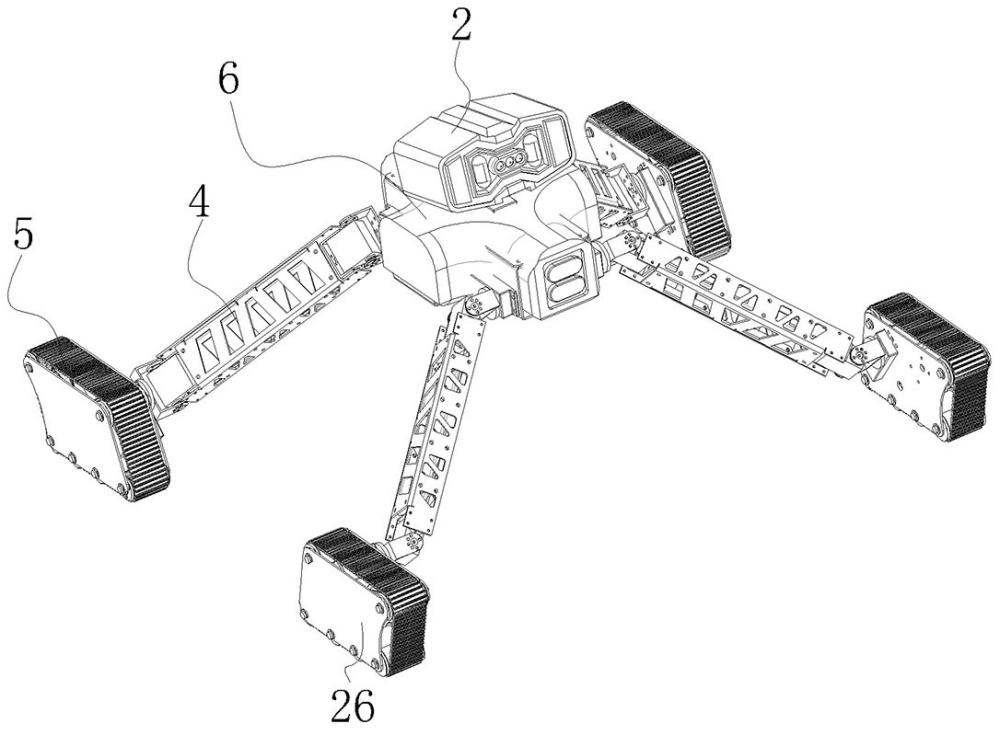
2、為實現上述目的,本發明提供如下技術方案:一種熱力管道巡檢機器人,包括主體框架,所述主體框架的兩側皆安裝有兩個連接件,四個所述連接件的底部皆安裝有腿部框架,所述腿部框架的底部設置有連接件,所述腿部框架底部的連接件一側設置有連接側板,所述連接側板的任意兩個對角位置處均設置有履帶輪,所述連接側板的另外兩個對角位置處皆設置有角滾輪,兩個所述角滾輪和兩個履帶輪的外表面共同連接有行走履帶,位于所述連接側板上方一角位置處履帶輪的一端設置有從動鏈條,所述連接側板表面靠近上方的履帶輪位置處設置有驅動機,所述驅動機的輸出軸上設置有主動鏈輪,靠近所述驅動機位置處的履帶輪一端設置有從動鏈輪,所述主動鏈輪和從動鏈輪的外表面共同連接有鏈條,所述主體框架的頂部設置有支撐框,所述支撐框的內部連接有轉軸,所述轉軸的一端延伸出支撐框,所述轉軸的延伸端設置有從動齒輪,所述從動齒輪的一側嚙合連接有主動齒輪,所述主動齒輪的一端設置有第一直流無刷電機,所述轉軸的中間位置處設置有撐柱,且撐柱的頂部延伸出支撐框的上方,所述撐柱的延伸端設置有第二直流無刷電機,所述第二直流無刷電機的頂部設置有支架,所述支架的頂部設置有機器視覺模塊,所述機器視覺模塊的前端設置有信息采集模塊,所述信息采集模塊的前端中間位置處設置有高清攝像頭。
3、優選的,所述連接件內包含有連接器、鉸接架和支撐架組成,所述支撐架分別安裝在腿部框架的頂部和底部,所述支撐架的連接有鉸接架,所述鉸接架的一端設置有連接器,連接器內部設置有電機,所述連接器分別安裝在主體框架兩側和連接側板的內部,其中四個連接件將腿部框架安裝在主體框架兩側,另外四個連接件將連接連接側板安裝在腿部框架底部,使行走履帶可以驅動主體框架進行移動,連接器內部的電機可驅動鉸接架進行轉動,以實現調節腿部框架進行多自由度運動,使機器人在越障時能靈活調整姿態。
4、優選的,所述主體框架的外表面設置有主體外殼,主體外殼將主體框架包裹住,使主體框架更美觀,同時起到防護效果避免灰塵進入主體框架內部。
5、優選的,所述連接側板的一側底部邊緣處設置有兩個副滾輪,兩個所副滾輪的底端與行走履帶連接,兩個副滾輪對行走履帶的底部進行支撐,保障行走履帶的底端與地面接觸時不會被較小凸起擠壓產生形變,提高行走履帶的行走功能。
6、優選的,兩個所述副滾輪、兩個角滾輪和兩個履帶輪的一端共同連接有防護側板,防護側板和連接側板配合使用,對副滾輪、兩個角滾輪和兩個履帶輪進行防護,使副滾輪、兩個角滾輪和兩個履帶輪不裸露在外界,降低被灰塵卡主的風險。
7、優選的,所述高清攝像頭兩側信息采集模塊的前端設置有兩個輔助照明設備,照明設備為led燈,對周圍環境進行照明,使高清攝像頭可以對環境進行圖像采集。
8、優選的,所述第二直流無刷電機的外表面設置有穩定架,穩定架將第二直流無刷電機支撐穩定,使第二直流無刷電機可以穩定安裝在支撐框外部。
9、與現有技術相比,本發明的有益效果是:
10、1、本熱力管道巡檢機器人,通過設置在主體框架兩側的四個腿部框架和位于每個腿部框架底部的行走履帶,腿部框架與主推框架、腿部框架與行走履帶皆由連接件連接,連接件可通過電機驅動實現多自由度運動,使機器人在越障時能靈活調整姿態,在平地行走時,履帶結構可通過合適的傳動裝置與電機配合,實現穩定的輪式行走。同時,電機的控制可以根據不同熱力管道情況和行走模式通過內置的控制器進行智能切換,控制器根據傳感器反饋的信息判斷地形狀況,使巡檢機器人可同時滿足平地高效行走和復雜地形越障的需求。
11、2、本熱力管道巡檢機器人,通過設置第一直流無刷電機和第二直流無刷電機與支架配合使用,使機器視覺模塊可以進行上下旋轉和左右旋轉,在進行巡檢時機器視覺模塊前端的高清攝像頭可以對多個角度進行圖像采集,提高巡檢范圍。
12、3、本熱力管道巡檢機器人,通過設置數據處理單元,用于實時記錄、查看和上傳數據,數據處理單元包括存儲模塊和無線通信模塊,存儲模塊用于存儲機器視覺模塊采集的圖像數據和傳感器反饋的機器人狀態信息,無線通信模塊可將數據實時上傳至云端服務器,同時也可接收來自遠程終端的遙控指令,在數據傳輸過程中,采用加密算法對數據進行加密,保證數據的安全性,提高效率。
技術特征:
1.一種熱力管道巡檢機器人,包括主體框架(1),其特征在于:所述主體框架(1)的兩側皆安裝有兩個連接件(3),四個所述連接件(3)的底部皆安裝有腿部框架(4),所述腿部框架(4)的底部設置有連接件(3),所述腿部框架(4)底部的連接件(3)一側設置有連接側板(14),所述連接側板(14)的任意兩個對角位置處均設置有履帶輪(12),所述連接側板(14)的另外兩個對角位置處皆設置有角滾輪(7),兩個所述角滾輪(7)和兩個履帶輪(12)的外表面共同連接有行走履帶(5),位于所述連接側板(14)上方一角位置處履帶輪(12)的一端設置有從動鏈條(10),所述連接側板(14)表面靠近上方履帶輪(12)位置處設置有驅動機(8),所述驅動機(8)的輸出軸上設置有主動鏈輪(11),靠近所述驅動機(8)位置處的履帶輪(12)一端設置有從動鏈輪(9),所述主動鏈輪(11)和從動鏈輪(9)的外表面共同連接有鏈條(10),所述主體框架(1)的頂部設置有支撐框(23),所述支撐框(23)的內部連接有轉軸(27),所述轉軸(27)的一端延伸出支撐框(23),所述轉軸(27)的延伸端設置有從動齒輪(22),所述從動齒輪(22)的一側嚙合連接有主動齒輪(25),所述主動齒輪(25)的一端設置有第一直流無刷電機(20),所述轉軸(27)的中間位置處設置有撐柱(19),且撐柱(19)的頂部延伸出支撐框(23)的上方,所述撐柱(19)的延伸端設置有第二直流無刷電機(24),所述第二直流無刷電機(24)的頂部設置有支架(18),所述支架(18)的頂部設置有機器視覺模塊(2),所述機器視覺模塊(2)的前端設置有信息采集模塊(15),所述信息采集模塊(15)的前端中間位置處設置有高清攝像頭(16)。
2.根據權利要求1所述的熱力管道巡檢機器人,其特征在于:所述連接件(3)內包含有連接器(301)、鉸接架(302)和支撐架(303)組成,所述支撐架(303)分別安裝在腿部框架(4)的頂部和底部,所述支撐架(303)的連接有鉸接架(302),所述鉸接架(302)的一端設置有連接器(301),所述連接器(301)分別安裝在主體框架(1)兩側和連接側板(14)的內部。
3.根據權利要求1所述的熱力管道巡檢機器人,其特征在于:所述主體框架(1)的外表面設置有主體外殼(6)。
4.根據權利要求1所述的熱力管道巡檢機器人,其特征在于:所述連接側板(14)的一側底部邊緣處設置有兩個副滾輪(13),兩個所副滾輪(13)的底端與行走履帶(5)連接。
5.根據權利要求4所述的熱力管道巡檢機器人,其特征在于:兩個所述副滾輪(13)、兩個角滾輪(7)和兩個履帶輪(12)的一端共同連接有防護側板(26)。
6.根據權利要求1所述的熱力管道巡檢機器人,其特征在于:所述高清攝像頭(16)兩側信息采集模塊(15)的前端設置有兩個輔助照明設備(17)。
7.根據權利要求1所述的熱力管道巡檢機器人,其特征在于:所述第二直流無刷電機(24)的外表面設置有穩定架(21)。
技術總結
本發明公開了一種熱力管道巡檢機器人,涉及巡檢裝置技術領域,包括主體框架,所述主體框架的兩側皆安裝有兩個連接件,四個所述連接件的底部皆安裝有腿部框架,所述腿部框架的底部設置有連接件,所述腿部框架底部的連接件一側設置有連接側板,所述連接側板的任意兩個對角位置處均設置有履帶輪,所述連接側板的另外兩個對角位置處皆設置有角滾輪,兩個所述角滾輪和兩個履帶輪的外表面共同連接有行走履帶。本發明通過設置,使巡檢機器人可同時滿足平地高效行走和復雜地形越障的需求,在進行巡檢時機器視覺模塊前端的高清攝像頭可以對多個角度進行圖像采集,提高巡檢范圍,在數據傳輸過程中,采用加密算法對數據進行加密,保證數據的安全性。
技術研發人員:邱釗鵬,李雪梅,陳春先
受保護的技術使用者:北京電子科技職業學院
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!