基于自適應事件觸發機制的無人機軌跡控制方法及系統與流程
本發明屬于無人機控制,尤其涉及基于自適應事件觸發機制的無人機軌跡控制方法及系統。
背景技術:
1、本部分的陳述僅僅是提供了與本發明相關的背景技術信息,不必然構成在先技術。
2、四旋翼無人機是當前各國研制的多旋翼無人機中應用領域最廣、功能最豐富、研究最為深入的機型。對于四旋翼無人機而言,實現穩定、高效且精準的控制是提升其任務執行能力的關鍵,這就亟須構建一套滿足多種需求的位置和姿態控制系統加以保證。首先,考慮其在低空飛行過程中常常會受到包含地面效應、陣風以及大氣湍流等各類外部干擾的影響,所設計的控制系統需要具有足夠的魯棒性,以應對外部干擾帶來的不利影響;其次,在實際飛行控制過程中,與之相關的各傳感器數據計算和測量過程可能會出現一定程度的延時,使得控制信號無法及時傳遞給執行機構,進而導致控制器效能的降低;于此同時,作為四旋翼無人機的執行機構,旋翼的轉速通常會被限制在一定范圍內變化,因此在控制器設計過程中需要考慮執行器飽和的問題;最后,考慮四旋翼無人機板載飛控模塊的計算與通信能力有限,在不降低控制器性能的前提下,控制器設計過程中應該注重算法結構的優化,盡量避免因為不必要的采樣導致計算和通信資源的浪費。
3、現有針對四旋翼無人機飛行控制方法的研究,如公開號cn118034068a,專利“一種四旋翼無人機分數階抗飽和滑模控制方法及裝置”;公開號cn117311165a,專利“四旋翼無人機基于干擾觀測器的指定固定時間控制方法”;公開號cn116795124a,專利“一種基于動態事件觸發的四旋翼無人機姿態控制方法”;公開號cn116225037a,專利“一種四旋翼無人機飛行姿態的自適應事件觸發控制方法”等文獻大多集中考慮外部干擾以及執行器飽和影響下的魯棒飛行控制問題,或者考慮事件觸發機制下的四旋翼無人機飛行控制問題。然而,在事件觸發機制下綜合考慮外部干擾、輸入時滯以及輸入飽和影響下的四旋翼無人機魯棒軌跡控制問題的研究還很少。
技術實現思路
1、為了解決上述背景技術中存在的技術問題,本發明提供基于自適應事件觸發機制的無人機軌跡控制方法及系統,設計的自適應事件觸發機制根據姿態子系統控制輸入的變化量自動調整觸發條件,提高了無人機軌跡控制的靈活性和適應性。
2、為了實現上述目的,本發明采用如下技術方案:
3、本發明的第一個方面提供基于自適應事件觸發機制的無人機軌跡控制方法,其包括:
4、獲取位置信號期望值和偏航角參考值;
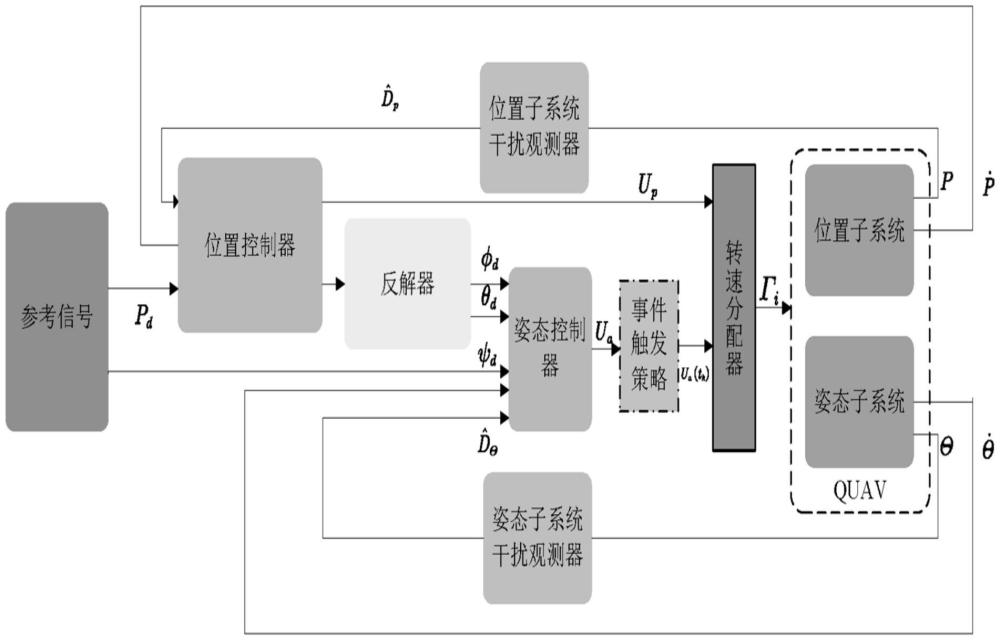
5、基于位置信號期望值,結合外界單位力干擾的估計值和無人機的位置坐標向量的一階導數,通過位置控制器,得到位置子系統的控制輸入;
6、對于位置子系統的控制輸入,通過反解器處理后,結合偏航角參考值、外界力矩干擾估計值和姿態角向量一階導數,通過姿態控制器得到姿態子系統控制輸入,并采用自適應事件觸發機制更新姿態子系統控制輸入;所述自適應事件觸發機制根據姿態子系統控制輸入的變化量調整觸發條件;
7、基于位置子系統的控制輸入,通過位置子系統,更新無人機的位置坐標向量和無人機的位置坐標向量的一階導數,且基于無人機的位置坐標向量,通過位置子系統干擾觀測器更新外界單位力干擾估計值;基于姿態子系統控制輸入,通過姿態子系統,更新姿態角向量和姿態角向量一階導數,且基于姿態角向量,通過姿態子系統干擾觀測器更新外部力矩干擾估計值。
8、進一步地,所述自適應事件觸發機制表示為:
9、
10、其中,t為當前時間,σ和k為設計參數,為k的自適應更新律,e(t)=ua(ti)-ua,ti為采樣的更新時間,ua為姿態子系統的控制輸入,e4為姿態跟蹤誤差,θ為姿態角向量。
11、進一步地,所述位置子系統表示為:
12、
13、其中,up為位置子系統的控制輸入,dp為外部單位力干擾,m是無人機的重量,g為重力加速度,ε=[0,0,1]t,x1表示無人機的位置坐標向量p,x2為無人機的位置坐標向量的一階導數
14、進一步地,所述姿態子系統表示為:
15、
16、其中,xn+1為中間變量,uθ=g(θ)ua,ua為姿態子系統的控制輸入,x3為姿態角向量θ,x4為姿態角向量一階導數sat()為飽和控制輸入函數,dθ為外界力矩干擾。
17、進一步地,所述位置控制器表示為:
18、
19、其中,up為位置子系統的控制輸入,為外界單位力干擾估計值,m是無人機的重量,g為重力加速度,a1和a2為正定參數矩陣,pd為位置信號期望值,e1為位置跟蹤誤差,e2為第一速度跟蹤誤差。
20、進一步地,所述姿態控制器表示為:
21、
22、其中,ua為姿態子系統的控制輸入,θ為姿態角向量,a4為正定參數矩陣,e3為姿態跟蹤誤差,e4為第二速度跟蹤誤差,為外界力矩干擾估計值,uc為補償控制器,x4d為虛擬控制量。
23、進一步地,所述姿態角向量包括滾轉角、俯仰角和偏航角。
24、本發明的第二個方面提供基于自適應事件觸發機制的無人機軌跡控制系統,其包括:
25、信號獲取模塊,其被配置為:獲取位置信號期望值和偏航角參考值;
26、位置控制模塊,其被配置為:基于位置信號期望值,結合外界單位力干擾的估計值和無人機的位置坐標向量的一階導數,通過位置控制器,得到位置子系統的控制輸入;
27、姿態控制模塊,其被配置為:對于位置子系統的控制輸入,通過反解器處理后,結合偏航角參考值、外界力矩干擾估計值和姿態角向量一階導數,通過姿態控制器得到姿態子系統控制輸入,并采用自適應事件觸發機制更新姿態子系統控制輸入;所述自適應事件觸發機制根據姿態子系統控制輸入的變化量調整觸發條件;
28、干擾估計模塊,其被配置為:基于位置子系統的控制輸入,通過位置子系統,更新無人機的位置坐標向量和無人機的位置坐標向量的一階導數,且基于無人機的位置坐標向量,通過位置子系統干擾觀測器更新外界單位力干擾估計值;基于姿態子系統控制輸入,通過姿態子系統,更新姿態角向量和姿態角向量一階導數,且基于姿態角向量,通過姿態子系統干擾觀測器更新外部力矩干擾估計值。
29、本發明的第三個方面提供一種計算機可讀存儲介質,其上存儲有計算機程序,該程序被處理器執行時實現如上述所述的基于自適應事件觸發機制的無人機軌跡控制方法中的步驟。
30、本發明的第四個方面提供一種計算機設備,包括計算機可讀存儲介質、處理器及存儲在計算機可讀存儲介質上并可在處理器上運行的計算機程序,所述處理器執行所述程序時實現如上述所述的基于自適應事件觸發機制的無人機軌跡控制方法中的步驟。
31、與現有技術相比,本發明的有益效果是:
32、本發明設計的自適應事件觸發機制根據姿態子系統控制輸入的變化量自動調整觸發條件,提高了無人機軌跡控制的靈活性和適應性。
33、本發明將干擾觀測器應用到四旋翼無人機中,有效提高了四旋翼無人機控制的抗干擾能力,使其實時監測外界干擾并及時采取措施,提高了四旋翼無人機的穩定性和飛行安全性。
34、本發明有效解決了四旋翼無人機在面臨外部干擾、輸入延遲以及執行器飽和情形下的姿態穩定與軌跡精確跟蹤控制問題。
- 還沒有人留言評論。精彩留言會獲得點贊!