一種半球諧振陀螺慣導(dǎo)系統(tǒng)溫度補(bǔ)償方法及補(bǔ)償系統(tǒng)與流程
本發(fā)明涉及慣性導(dǎo)航系統(tǒng),特別涉及一種半球諧振陀螺慣導(dǎo)系統(tǒng)溫度補(bǔ)償方法及補(bǔ)償系統(tǒng)。
背景技術(shù):
1、隨著慣性導(dǎo)航技術(shù)的不斷發(fā)展,半球諧振陀螺(hrg)因其高精度和高穩(wěn)定性廣泛應(yīng)用于航空航天、海洋探測(cè)、精密武器等領(lǐng)域。然而,hrg在實(shí)際應(yīng)用中經(jīng)常面臨溫度變化對(duì)其性能的影響,尤其是在復(fù)雜環(huán)境下運(yùn)行時(shí),溫度波動(dòng)往往導(dǎo)致hrg輸出信號(hào)的漂移,從而嚴(yán)重影響慣性導(dǎo)航系統(tǒng)的精度和穩(wěn)定性。
2、溫度漂移是影響hrg性能的主要因素之一,通常表現(xiàn)為hrg輸出信號(hào)與環(huán)境溫度之間的強(qiáng)相關(guān)性。具體來說,隨著溫度的升高或降低,hrg的振蕩頻率、靈敏度以及系統(tǒng)的噪聲特性等都會(huì)發(fā)生變化,這種變化會(huì)導(dǎo)致其輸出信號(hào)發(fā)生明顯偏移。為了確保hrg在溫度變化范圍內(nèi)能夠維持高精度的工作性能,溫度補(bǔ)償技術(shù)成為了解決這一問題的關(guān)鍵。
3、傳統(tǒng)的溫度補(bǔ)償方法大多基于線性模型,通過預(yù)先獲取不同溫度下hrg的輸出數(shù)據(jù),并采用線性回歸等方法來建立溫度與hrg漂移之間的關(guān)系。這種線性補(bǔ)償方法雖然在某些溫度范圍內(nèi)能夠提供一定的修正,但其補(bǔ)償精度常常無法滿足高精度導(dǎo)航系統(tǒng)的需求。特別是在溫度變化較為劇烈的環(huán)境中,hrg的溫度漂移往往呈現(xiàn)出高度非線性的特征,傳統(tǒng)的線性模型無法有效捕捉和修正這種非線性變化,從而導(dǎo)致補(bǔ)償效果的嚴(yán)重下降。
4、此外,隨著高精度慣性導(dǎo)航系統(tǒng)的不斷推進(jìn),溫度補(bǔ)償?shù)木纫笠苍絹碓礁摺鹘y(tǒng)線性模型的補(bǔ)償策略未能充分考慮到hrg輸出漂移與溫度之間的復(fù)雜、動(dòng)態(tài)的非線性關(guān)系,導(dǎo)致在不同工作條件下,系統(tǒng)的溫度補(bǔ)償效果往往存在較大的誤差。為了克服這一瓶頸,研究人員亟需探索新的溫度補(bǔ)償方法,尤其是能夠描述hrg輸出漂移的非線性特性,進(jìn)而提高補(bǔ)償精度的先進(jìn)模型和算法。
5、因此,基于半球諧振陀螺(hrg)的溫度漂移具有明顯的非線性特性,傳統(tǒng)的線性模型顯然難以準(zhǔn)確地描述其復(fù)雜的溫度特性,迫切需要建立更為復(fù)雜的非線性模型,以提高溫度補(bǔ)償?shù)木群瓦m應(yīng)性。
技術(shù)實(shí)現(xiàn)思路
1、為了解決以上問題,本發(fā)明提供了一種半球諧振陀螺慣導(dǎo)系統(tǒng)溫度補(bǔ)償方法及補(bǔ)償系統(tǒng)。
2、為實(shí)現(xiàn)上述目的,本發(fā)明所采用的技術(shù)方案如下:
3、一方面,本發(fā)明公開了一種半球諧振陀螺慣導(dǎo)系統(tǒng)溫度補(bǔ)償方法,包括:
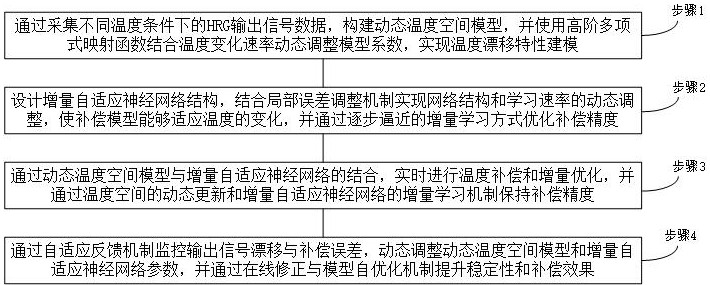
4、步驟1:通過采集不同溫度條件下的hrg輸出信號(hào)數(shù)據(jù),構(gòu)建動(dòng)態(tài)溫度空間模型,并使用高階多項(xiàng)式映射函數(shù)結(jié)合溫度變化速率動(dòng)態(tài)調(diào)整模型系數(shù),實(shí)現(xiàn)溫度漂移特性建模;
5、步驟2:設(shè)計(jì)增量自適應(yīng)神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),結(jié)合局部誤差調(diào)整機(jī)制實(shí)現(xiàn)網(wǎng)絡(luò)結(jié)構(gòu)和學(xué)習(xí)速率的動(dòng)態(tài)調(diào)整,使補(bǔ)償模型能夠適應(yīng)溫度的變化,并通過逐步逼近的增量學(xué)習(xí)方式優(yōu)化補(bǔ)償精度;
6、步驟3:通過動(dòng)態(tài)溫度空間模型與增量自適應(yīng)神經(jīng)網(wǎng)絡(luò)的結(jié)合,實(shí)時(shí)進(jìn)行溫度補(bǔ)償和增量?jī)?yōu)化,并通過溫度空間的動(dòng)態(tài)更新和增量自適應(yīng)神經(jīng)網(wǎng)絡(luò)的增量學(xué)習(xí)機(jī)制保持補(bǔ)償精度;
7、步驟4:通過自適應(yīng)反饋機(jī)制監(jiān)控輸出信號(hào)漂移與補(bǔ)償誤差,動(dòng)態(tài)調(diào)整動(dòng)態(tài)溫度空間模型和增量自適應(yīng)神經(jīng)網(wǎng)絡(luò)參數(shù),并通過在線修正與模型自優(yōu)化機(jī)制提升穩(wěn)定性和補(bǔ)償效果。
8、進(jìn)一步的:所述步驟1包括:
9、獲取在不同溫度條件下hrg的輸出信號(hào)數(shù)據(jù),同時(shí)記錄每個(gè)實(shí)驗(yàn)時(shí)刻的溫度值及其變化速率;
10、通過分析實(shí)驗(yàn)數(shù)據(jù),構(gòu)建隨溫度變化而動(dòng)態(tài)更新的多維動(dòng)態(tài)溫度空間模型,以根據(jù)不同的溫度和變化速率調(diào)整hrg的漂移特性;
11、根據(jù)實(shí)驗(yàn)數(shù)據(jù)的特點(diǎn),考慮溫度及其變化速率對(duì)hrg輸出的影響,通過回歸分析來確定多項(xiàng)式的系數(shù);
12、通過實(shí)時(shí)測(cè)量溫度變化速率和溫度梯度,對(duì)高階多項(xiàng)式模型的系數(shù)進(jìn)行動(dòng)態(tài)調(diào)整,以適應(yīng)溫度的快速變化或緩慢變化,確保溫度補(bǔ)償?shù)木_性。
13、進(jìn)一步的:所述步驟2包括:
14、根據(jù)實(shí)時(shí)輸入信號(hào)動(dòng)態(tài)調(diào)整網(wǎng)絡(luò)結(jié)構(gòu)的增量學(xué)習(xí)神經(jīng)網(wǎng)絡(luò),確保hrg的溫度補(bǔ)償能夠?qū)崟r(shí)適應(yīng)環(huán)境溫度的變化;
15、通過設(shè)計(jì)局部誤差調(diào)整機(jī)制,網(wǎng)絡(luò)能夠根據(jù)溫度變化速率和hrg輸出漂移的變化速率動(dòng)態(tài)調(diào)整學(xué)習(xí)速率,使得補(bǔ)償過程能夠適應(yīng)溫度變化;
16、通過逐步逼近的增量學(xué)習(xí)方式,增量自適應(yīng)神經(jīng)網(wǎng)絡(luò)能夠在每次數(shù)據(jù)到來時(shí)微調(diào)網(wǎng)絡(luò)權(quán)重。
17、進(jìn)一步的:所述步驟3包括:
18、通過將動(dòng)態(tài)溫度空間模型與增量自適應(yīng)神經(jīng)網(wǎng)絡(luò)結(jié)合,在每次溫度變化時(shí),先通過動(dòng)態(tài)溫度空間模型進(jìn)行局部建模,再通過增量自適應(yīng)神經(jīng)網(wǎng)絡(luò)進(jìn)行增量?jī)?yōu)化,最終輸出精確的補(bǔ)償信號(hào);
19、動(dòng)態(tài)溫度空間模型根據(jù)環(huán)境的溫度變化實(shí)時(shí)更新溫度空間的幾何特性;
20、通過增量自適應(yīng)神經(jīng)網(wǎng)絡(luò)的增量學(xué)習(xí)機(jī)制根據(jù)實(shí)時(shí)誤差反饋動(dòng)態(tài)調(diào)整學(xué)習(xí)速率和網(wǎng)絡(luò)權(quán)重,確保補(bǔ)償模型適應(yīng)溫度的變化。
21、進(jìn)一步的,所述步驟4包括:
22、通過實(shí)時(shí)監(jiān)控hrg輸出信號(hào)的漂移和補(bǔ)償誤差,結(jié)合溫度變化的特征,動(dòng)態(tài)調(diào)整動(dòng)態(tài)溫度空間模型和增量自適應(yīng)神經(jīng)網(wǎng)絡(luò)的參數(shù),確保補(bǔ)償精度;
23、通過積累歷史數(shù)據(jù)并定期對(duì)模型進(jìn)行優(yōu)化,逐步提高系統(tǒng)的穩(wěn)定性和補(bǔ)償效果;
24、通過增量學(xué)習(xí)與反饋修正,實(shí)現(xiàn)對(duì)hrg輸出漂移的補(bǔ)償。
25、另一方面,本發(fā)明公開了一種半球諧振陀螺慣導(dǎo)系統(tǒng)溫度補(bǔ)償系統(tǒng),包括:
26、溫度空間建模與初始模型設(shè)定模塊:通過采集不同溫度條件下的hrg輸出信號(hào)數(shù)據(jù),構(gòu)建動(dòng)態(tài)溫度空間模型,并使用高階多項(xiàng)式映射函數(shù)結(jié)合溫度變化速率動(dòng)態(tài)調(diào)整模型系數(shù),實(shí)現(xiàn)溫度漂移特性建模;
27、增量自適應(yīng)神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)模塊:設(shè)計(jì)增量自適應(yīng)神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),結(jié)合局部誤差調(diào)整機(jī)制實(shí)現(xiàn)網(wǎng)絡(luò)結(jié)構(gòu)和學(xué)習(xí)速率的動(dòng)態(tài)調(diào)整,使補(bǔ)償模型能夠適應(yīng)溫度的變化,并通過逐步逼近的增量學(xué)習(xí)方式優(yōu)化補(bǔ)償精度;
28、溫度補(bǔ)償動(dòng)態(tài)優(yōu)化模塊:通過動(dòng)態(tài)溫度空間模型與增量自適應(yīng)神經(jīng)網(wǎng)絡(luò)的結(jié)合,實(shí)時(shí)進(jìn)行溫度補(bǔ)償和增量?jī)?yōu)化,并通過溫度空間的動(dòng)態(tài)更新和增量自適應(yīng)神經(jīng)網(wǎng)絡(luò)的增量學(xué)習(xí)機(jī)制保持補(bǔ)償精度;
29、自適應(yīng)反饋與修正機(jī)制模塊:通過自適應(yīng)反饋機(jī)制監(jiān)控輸出信號(hào)漂移與補(bǔ)償誤差,動(dòng)態(tài)調(diào)整動(dòng)態(tài)溫度空間模型和增量自適應(yīng)神經(jīng)網(wǎng)絡(luò)參數(shù),并通過在線修正與模型自優(yōu)化機(jī)制提升穩(wěn)定性和補(bǔ)償效果。
30、進(jìn)一步的:所述溫度空間建模與初始模型設(shè)定模塊包括:
31、獲取在不同溫度條件下hrg的輸出信號(hào)數(shù)據(jù),同時(shí)記錄每個(gè)實(shí)驗(yàn)時(shí)刻的溫度值及其變化速率;
32、通過分析實(shí)驗(yàn)數(shù)據(jù),構(gòu)建隨溫度變化而動(dòng)態(tài)更新的多維動(dòng)態(tài)溫度空間模型,以根據(jù)不同的溫度和變化速率調(diào)整hrg的漂移特性;
33、根據(jù)實(shí)驗(yàn)數(shù)據(jù)的特點(diǎn),考慮溫度及其變化速率對(duì)hrg輸出的影響,通過回歸分析來確定多項(xiàng)式的系數(shù);
34、通過實(shí)時(shí)測(cè)量溫度變化速率和溫度梯度,對(duì)高階多項(xiàng)式模型的系數(shù)進(jìn)行動(dòng)態(tài)調(diào)整,以適應(yīng)溫度的快速變化或緩慢變化,確保溫度補(bǔ)償?shù)木_性。
35、進(jìn)一步的:所述增量自適應(yīng)神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)模塊包括:
36、根據(jù)實(shí)時(shí)輸入信號(hào)動(dòng)態(tài)調(diào)整網(wǎng)絡(luò)結(jié)構(gòu)的增量學(xué)習(xí)神經(jīng)網(wǎng)絡(luò),確保hrg的溫度補(bǔ)償能夠?qū)崟r(shí)適應(yīng)環(huán)境溫度的變化;
37、通過設(shè)計(jì)局部誤差調(diào)整機(jī)制,網(wǎng)絡(luò)能夠根據(jù)溫度變化速率和hrg輸出漂移的變化速率動(dòng)態(tài)調(diào)整學(xué)習(xí)速率,使得補(bǔ)償過程能夠適應(yīng)溫度變化;
38、通過逐步逼近的增量學(xué)習(xí)方式,增量自適應(yīng)神經(jīng)網(wǎng)絡(luò)能夠在每次數(shù)據(jù)到來時(shí)微調(diào)網(wǎng)絡(luò)權(quán)重。
39、進(jìn)一步的:所述溫度補(bǔ)償動(dòng)態(tài)優(yōu)化模塊包括:
40、通過將動(dòng)態(tài)溫度空間模型與增量自適應(yīng)神經(jīng)網(wǎng)絡(luò)結(jié)合,在每次溫度變化時(shí),先通過動(dòng)態(tài)溫度空間模型進(jìn)行局部建模,再通過增量自適應(yīng)神經(jīng)網(wǎng)絡(luò)進(jìn)行增量?jī)?yōu)化,最終輸出精確的補(bǔ)償信號(hào);
41、動(dòng)態(tài)溫度空間模型根據(jù)環(huán)境的溫度變化實(shí)時(shí)更新溫度空間的幾何特性;
42、通過增量自適應(yīng)神經(jīng)網(wǎng)絡(luò)的增量學(xué)習(xí)機(jī)制根據(jù)實(shí)時(shí)誤差反饋動(dòng)態(tài)調(diào)整學(xué)習(xí)速率和網(wǎng)絡(luò)權(quán)重,確保補(bǔ)償模型適應(yīng)溫度的變化。
43、進(jìn)一步的:所述自適應(yīng)反饋與修正機(jī)制模塊包括:
44、通過實(shí)時(shí)監(jiān)控hrg輸出信號(hào)的漂移和補(bǔ)償誤差,結(jié)合溫度變化的特征,動(dòng)態(tài)調(diào)整動(dòng)態(tài)溫度空間模型和增量自適應(yīng)神經(jīng)網(wǎng)絡(luò)的參數(shù),確保補(bǔ)償精度;
45、通過積累歷史數(shù)據(jù)并定期對(duì)模型進(jìn)行優(yōu)化,逐步提高系統(tǒng)的穩(wěn)定性和補(bǔ)償效果;
46、通過增量學(xué)習(xí)與反饋修正,實(shí)現(xiàn)對(duì)hrg輸出漂移的補(bǔ)償。
47、本發(fā)明與現(xiàn)有技術(shù)相比,所取得的技術(shù)進(jìn)步在于:
48、傳統(tǒng)的線性補(bǔ)償方法由于無法準(zhǔn)確描述hrg溫度漂移的復(fù)雜非線性特性,常常在溫度變化較大時(shí)無法提供足夠的補(bǔ)償精度。本發(fā)明通過引入動(dòng)態(tài)溫度空間模型和增量自適應(yīng)神經(jīng)網(wǎng)絡(luò),結(jié)合溫度與漂移輸出信號(hào)之間復(fù)雜的非線性關(guān)系,能夠準(zhǔn)確地捕捉到溫度變化對(duì)hrg性能的多維影響。通過自定義非線性映射函數(shù),該方法能夠在不同的溫度范圍內(nèi)進(jìn)行有效建模,顯著提高了補(bǔ)償?shù)木龋貏e是在溫度波動(dòng)較大的環(huán)境下,補(bǔ)償效果仍能保持高效穩(wěn)定。
49、本發(fā)明采用了增量自適應(yīng)神經(jīng)網(wǎng)絡(luò),使得系統(tǒng)能夠根據(jù)實(shí)時(shí)的溫度和hrg輸出數(shù)據(jù)自動(dòng)調(diào)整補(bǔ)償模型。與傳統(tǒng)的靜態(tài)訓(xùn)練方法不同,動(dòng)態(tài)溫度空間模型能夠在每一次溫度波動(dòng)后,通過“逐步逼近”的增量學(xué)習(xí)策略對(duì)模型進(jìn)行實(shí)時(shí)優(yōu)化。每當(dāng)新的數(shù)據(jù)到來時(shí),動(dòng)態(tài)溫度空間模型可以根據(jù)當(dāng)前的誤差調(diào)整權(quán)重,動(dòng)態(tài)修正網(wǎng)絡(luò)結(jié)構(gòu),從而不斷提升系統(tǒng)的補(bǔ)償精度,避免了過度依賴歷史數(shù)據(jù)所帶來的滯后效應(yīng)。
50、本發(fā)明的另一個(gè)突出優(yōu)點(diǎn)是設(shè)計(jì)了自適應(yīng)反饋機(jī)制,該機(jī)制通過實(shí)時(shí)監(jiān)控hrg的輸出信號(hào)漂移,結(jié)合模型預(yù)測(cè)值與實(shí)際漂移之間的誤差,自動(dòng)調(diào)整補(bǔ)償策略。當(dāng)系統(tǒng)發(fā)現(xiàn)溫度變化導(dǎo)致的誤差超過預(yù)設(shè)閾值時(shí),自適應(yīng)反饋機(jī)制會(huì)迅速觸發(fā),并根據(jù)誤差大小動(dòng)態(tài)調(diào)整補(bǔ)償模型的參數(shù)。這種反饋機(jī)制不僅在瞬時(shí)誤差出現(xiàn)時(shí)進(jìn)行修正,還能根據(jù)長(zhǎng)時(shí)間積累的反饋數(shù)據(jù)逐步優(yōu)化動(dòng)態(tài)溫度空間模型和動(dòng)態(tài)溫度空間模型的結(jié)構(gòu),提高了系統(tǒng)的長(zhǎng)期穩(wěn)定性。
51、本發(fā)明還結(jié)合了在線修正與模型自優(yōu)化機(jī)制,能夠根據(jù)歷史數(shù)據(jù)和長(zhǎng)期運(yùn)行中的溫度變化特性進(jìn)行自動(dòng)優(yōu)化。在多次運(yùn)行和溫度波動(dòng)后,系統(tǒng)能夠通過對(duì)動(dòng)態(tài)溫度空間模型和動(dòng)態(tài)溫度空間模型的定期修正,使得模型持續(xù)適應(yīng)溫度變化趨勢(shì),并不斷提升補(bǔ)償精度,即便是在復(fù)雜、動(dòng)態(tài)的工作環(huán)境中,系統(tǒng)也能維持較高的精度和穩(wěn)定性,有效避免了傳統(tǒng)溫度補(bǔ)償方法中因長(zhǎng)期運(yùn)行導(dǎo)致的精度下降問題。
52、通過將動(dòng)態(tài)溫度空間模型與動(dòng)態(tài)溫度空間模型相結(jié)合,本發(fā)明能夠在溫度變化的同時(shí)進(jìn)行實(shí)時(shí)的動(dòng)態(tài)補(bǔ)償,當(dāng)系統(tǒng)檢測(cè)到溫度變化時(shí),動(dòng)態(tài)溫度空間模型首先對(duì)當(dāng)前的溫度-漂移關(guān)系進(jìn)行局部建模,然后通過動(dòng)態(tài)溫度空間模型進(jìn)行增量?jī)?yōu)化,最終輸出實(shí)時(shí)的補(bǔ)償信號(hào),這一過程確保了hrg輸出信號(hào)能夠隨著溫度變化精確校正,不僅減少了傳統(tǒng)補(bǔ)償方法中的滯后現(xiàn)象,也提高了補(bǔ)償精度的實(shí)時(shí)性。在極端溫度變化或長(zhǎng)時(shí)間溫度波動(dòng)的環(huán)境中,傳統(tǒng)線性模型往往無法應(yīng)對(duì)溫度變化的劇烈程度,導(dǎo)致補(bǔ)償精度明顯下降。而本發(fā)明通過實(shí)時(shí)調(diào)整補(bǔ)償模型,不僅能夠在正常溫度范圍內(nèi)提供高精度的補(bǔ)償,還能夠在極端環(huán)境條件下進(jìn)行有效的自我修正,極大地提高了系統(tǒng)的環(huán)境適應(yīng)性,確保其在多變的溫度條件下保持穩(wěn)定的性能。
53、綜上所述,本發(fā)明有效解決了傳統(tǒng)補(bǔ)償方法中溫度漂移建模精度不足、適應(yīng)性差和長(zhǎng)時(shí)間運(yùn)行后的補(bǔ)償精度衰減等問題。
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!