一種基于大數據的煤礦井下導航控制系統及裝置的制作方法
本發明涉及井下導航控制,更具體地說,本發明涉及一種基于大數據的煤礦井下導航控制系統及裝置。
背景技術:
1、隨著煤礦井下作業環境日趨復雜和安全標準不斷提高,傳統井下導航系統多采用慣性導航、無線電測距等方法,但在實際應用中,由于巷道彎曲、金屬支護和地質構造等因素影響,無線電信號常受多徑干擾和波導效應干擾,導致定位誤差增大;同時,井下環境中存在結構突變和局部地質異常,傳統單一數據源方法難以實時反映環境變化,使得路徑規劃偏差明顯。
2、為了解決上述問題,現提供一種基于大數據的煤礦井下導航控制系統及裝置。
技術實現思路
1、為了克服現有技術的上述缺陷,本發明的實施例提供一種基于大數據的煤礦井下導航控制系統及裝置以解決上述背景技術中提出的問題。
2、為實現上述目的,本發明提供如下技術方案:
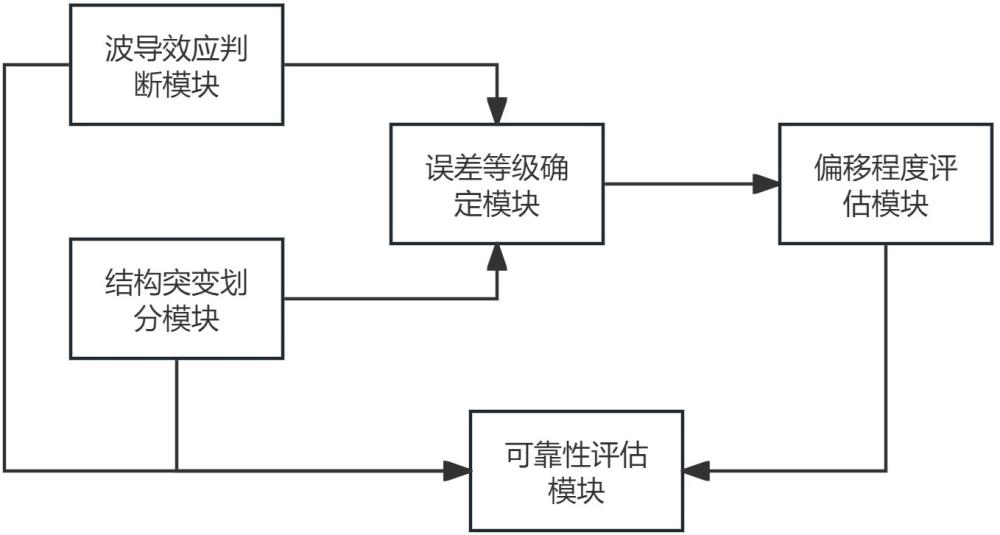
3、一種基于大數據的煤礦井下導航控制系統,包括波導效應判斷模塊、結構突變劃分模塊、誤差等級確定模塊、偏移程度評估模塊以及可靠性評估模塊;
4、波導效應判斷模塊通過實時監測井下巷道中的無線電信號傳播特征,利用小波變換結合卷積神經網絡識別無線電信號反射模式,判斷井下巷道的波導效應等級;
5、結構突變劃分模塊對井下巷道三維點云數據進行多尺度曲率分析,基于dbscan聚類算法劃分井下巷道結構突變區域;
6、誤差等級確定模塊基于井下巷道的波導效應等級和井下巷道結構突變區域劃分結果,確定井下巷道導航誤差等級;
7、當導航誤差等級達到二級或三級時,偏移程度評估模塊通過動態時間規整算法分析歷史導航軌跡數據集合,評估當前導航路徑的偏移程度;
8、可靠性評估模塊將井下巷道的波導效應等級、井下巷道結構突變區域劃分結果以及當前導航路徑的偏移程度輸入深度置信網絡進行綜合分析,評估導航控制系統的可靠性,并判斷是否觸發路徑重新規劃指令。
9、在一個優選的實施方式中,通過實時監測井下巷道中的無線電信號傳播特征,利用小波變換結合卷積神經網絡識別無線電信號反射模式,判斷當前井下巷道的波導效應等級,具體為:
10、實時采集井下無線電信號,獲取幅值、相位及時延數據;
11、對采集的數據進行預處理,降低噪聲;
12、運用小波變換對無線電信號進行時頻分解,提取多尺度特征;
13、構造多維張量,將分解結果輸入卷積神經網絡模型;
14、利用卷積神經網絡識別信號反射模式和干涉特征;
15、根據識別結果判斷井下巷道波導效應等級。
16、在一個優選的實施方式中,根據識別結果判斷井下巷道波導效應等級,具體為:
17、根據決策函數內部包含的預設閾值進行波導效應等級判定:
18、當關鍵特征值的算術平均值大于或等于預設閾值,判定井下巷道的波導效應等級為低波導效應等級;
19、當關鍵特征值的算術平均值小于預設閾值,判定井下巷道的波導效應等級為高波導效應等級。
20、在一個優選的實施方式中,對井下巷道三維點云數據進行多尺度曲率分析,基于dbscan聚類算法劃分井下巷道結構突變區域,具體為:
21、采集并對三維點云數據;
22、選定多層尺度,計算局部曲率值;
23、在各尺度上提取超閾值曲率區域;
24、將多尺度曲率特征構建為聚類輸入向量;
25、應用dbscan聚類算法標定結構突變區域;
26、輸出井下巷道結構突變區域邊界;
27、對井下巷道結構突變區域進行風險預警。
28、在一個優選的實施方式中,對井下巷道結構突變區域進行風險預警,具體為:
29、預設低風險閾值和高風險閾值,與警示指數進行比較:
30、當警示指數小于等于低風險閾值,則將井下巷道結構突變區域定義為低風險區域;
31、當警示指數大于低風險閾值,且小于高風險閾值,則將井下巷道結構突變區域定義為中風險區域;
32、當警示指數大于等于高風險閾值,則將井下巷道結構突變區域定義為高風險區域。
33、在一個優選的實施方式中,基于井下巷道的波導效應等級和井下巷道結構突變區域劃分結果,確定井下巷道導航誤差等級,具體為:
34、當井下巷道的波導效應等級為低波導效應等級,且警示指數小于等于低風險閾值,判定井下巷道導航誤差等級為一級;
35、當井下巷道的波導效應等級為高波導效應等級,且警示指數大于低風險閾值,且小于高風險閾值,判定井下巷道導航誤差等級為二級;
36、當井下巷道的波導效應等級為高波導效應等級,且警示指數大于等于高風險閾值,判定井下巷道導航誤差等級為三級。
37、在一個優選的實施方式中,通過動態時間規整算法分析歷史導航軌跡數據集合,評估當前導航路徑的偏移程度,具體為:
38、標準化歷史導航軌跡數據集合與實時導航軌跡數據集合;
39、構建多維度的特征序列;
40、選擇歐幾里得距離作為序列度量準則;
41、運用動態時間規整算法對軌跡序列進行最優對齊;
42、計算軌跡對齊誤差,輸出動態時間規整匹配得分;
43、比較匹配得分與匹配得分閾值,量化當前導航路徑偏移程度。
44、在一個優選的實施方式中,比較匹配得分與匹配得分閾值,量化當前導航路徑偏移程度,具體為:
45、預設匹配得分閾值,將動態時間規整匹配得分與預設匹配得分閾值進行比較:
46、當動態時間規整匹配得分大于或等于預設匹配得分閾值,表明當前導航路徑的偏移程度高;
47、當動態時間規整匹配得分大于或等于預設匹配得分閾值,表明當前導航路徑的偏移程度低。
48、在一個優選的實施方式中,將井下巷道的波導效應等級、井下巷道結構突變區域劃分結果以及當前導航路徑的偏移程度輸入深度置信網絡進行綜合分析,評估導航控制系統的可靠性,并判斷是否觸發路徑重新規劃指令,具體為:
49、整合井下巷道的波導效應等級、井下巷道結構突變區域劃分結果和動態時間規整匹配得分;
50、構建多通道輸入,送入深度置信網絡學習;
51、在隱層中提煉多源特征,識別潛在關聯;
52、通過網絡權重迭代,生成導航控制系統的可靠性評分。
53、在一個優選的實施方式中,判斷是否觸發路徑重新規劃指令,具體為:
54、預設可靠性評分閾值,將可靠性評分與可靠性評分閾值進行比較:
55、當可靠性評分大于可靠性評分閾值,說明導航控制系統的可靠性高,判定不觸發路徑重新規劃指令;
56、當可靠性評分小于等于可靠性評分閾值,說明導航控制系統的可靠性差,判定觸發路徑重新規劃指令。
57、另一方面,本發明提供一種基于大數據的煤礦井下導航控制裝置,包括:
58、一個或多個處理器;
59、存儲裝置,用于存儲一個或多個程序;
60、當一個或多個程序被一個或多個處理器執行時,使得一個或多個處理器實現一種基于大數據的煤礦井下導航控制系統。
61、本發明一種基于大數據的煤礦井下導航控制系統及裝置的技術效果和優點:
62、通過多源數據融合與智能化處理,實現了井下導航控制系統的高精度定位與風險預警。利用實時監測井下無線電信號的波導效應和三維點云數據的多尺度曲率分析,導航控制系統能夠準確識別環境中由金屬支護、巷道彎曲及地質異常引起的信號干擾和結構突變,從而精確確定導航誤差等級。當導航誤差達到二級或三級時,動態時間規整算法實時評估當前導航路徑偏移情況,并結合深度置信網絡綜合分析波導效應等級、結構突變區域劃分結果與當前導航路徑的偏移程度,生成可靠性評分,進而判定是否觸發路徑重新規劃指令。相比傳統單一數據源方法,大幅提高了對復雜井下環境的適應性和決策準確性,降低了定位誤差與安全風險,為煤礦井下作業提供了可靠的技術保障和風險防控手段,有效提升了導航精度和導航控制系統整體可靠性。
- 還沒有人留言評論。精彩留言會獲得點贊!