一種基于密度聚類的雷達信源數目檢測方法、系統及終端
本發明涉及陣列信號處理領域,尤其涉及一種基于密度聚類的雷達信源數目檢測方法、系統及終端。
背景技術:
1、在陣列雷達信號處理技術中,信號源角度估計,即雷達回波信號到達角度(direction?of?arrival,doa)估計,是一個關鍵的問題,許多空間角度估計算法,如多信號分類(multiple?signal?classification,music)、旋轉不變子空間技術(estimation?ofsignal?parameters?via?rotational?invariance?techniques,esprit)等,依賴于準確的雷達信號源(雷達回波信號)數目作為先驗輸入,但在實際的應用中,信號源的數目往往是未知的,因此,需要準確地估計信號源數目。
2、目前,所提出的多種信號源數目估計方法在色噪聲條件下性能較差,而其中蓋氏圓方法雖然能在空間色噪聲下估計信號源的數目,但在低信噪比情況下準確率不高,因此會影響信號源數目的估計,從而導致雷達回波信號到達角度估計不準確。
3、因此,現有技術還有待于改進和發展。
技術實現思路
1、本發明的主要目的在于提供一種基于密度聚類的雷達信源數目檢測方法、系統、終端及計算機可讀存儲介質,旨在解決現有技術中所提出的多種信號源數目估計方法在色噪聲條件下性能較差,而其中蓋氏圓方法雖然能在空間色噪聲下估計信號源的數目,但在低信噪比情況下準確率不高,因此會影響信號源數目的估計,從而導致雷達回波信號到達角度估計不準確的問題。
2、為實現上述目的,本發明提供一種基于密度聚類的雷達信源數目檢測方法,所述基于密度聚類的雷達信源數目檢測方法包括如下步驟:
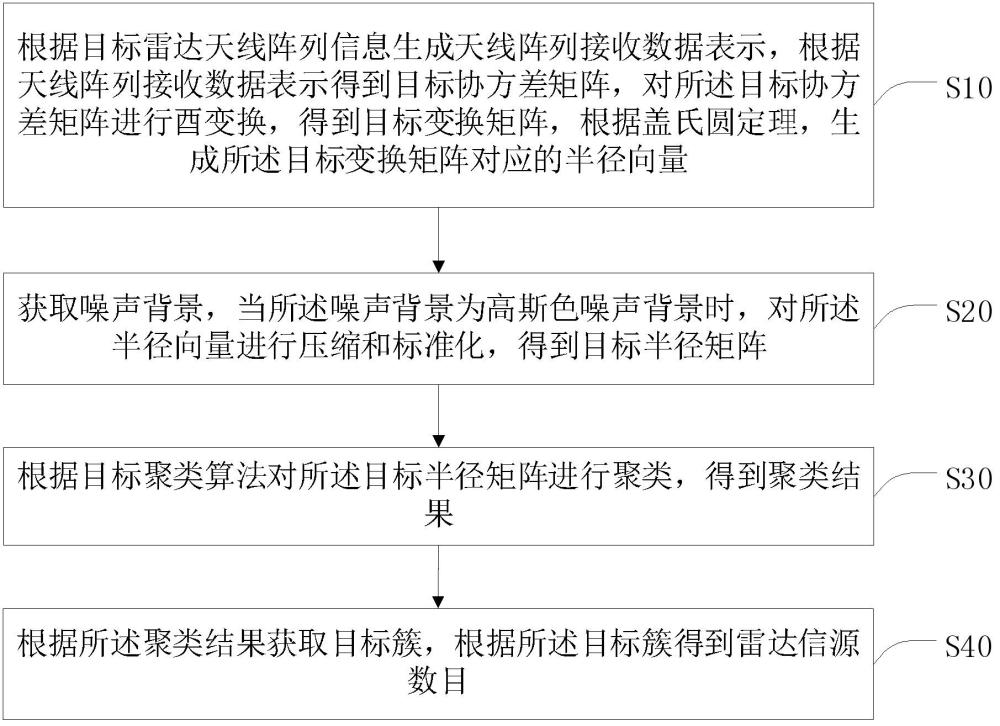
3、根據目標雷達天線陣列信息生成天線陣列接收數據表示,根據天線陣列接收數據表示得到目標協方差矩陣,對所述目標協方差矩陣進行酉變換,得到目標變換矩陣,根據蓋氏圓定理,生成所述目標變換矩陣對應的半徑向量;
4、獲取噪聲背景,當所述噪聲背景為高斯色噪聲背景時,對所述半徑向量進行壓縮和標準化,得到目標半徑矩陣;
5、根據目標聚類算法對所述目標半徑矩陣進行聚類,得到聚類結果;
6、根據所述聚類結果獲取目標簇,根據所述目標簇得到雷達信源數目。
7、可選地,所述根據目標雷達天線陣列信息生成天線陣列接收數據表示,根據天線陣列接收數據表示得到目標協方差矩陣,對所述目標協方差矩陣進行酉變換,得到目標變換矩陣,根據蓋氏圓定理,生成所述目標變換矩陣對應的半徑向量,具體包括:
8、根據所述目標雷達天線陣列信息構建每個信號源對應的陣列導向矢量,根據所有的所述陣列導向矢量,生成導向矢量矩陣,根據所述導向矢量矩陣生成所述天線陣列接收數據表示;
9、根據所述天線陣列接收數據表示得到所述目標協方差矩陣和雷達回波信號協方差矩陣;
10、根據所述雷達回波信號協方差矩陣對所述目標協方差矩陣進行酉變換,得到所述目標變換矩陣;
11、根據蓋氏圓定理,從所述目標變換矩陣中獲取每個蓋氏圓的蓋氏圓半徑,根據所有所述蓋氏圓半徑,生成所述半徑向量。
12、可選地,所述根據所述雷達回波信號協方差矩陣對所述目標協方差矩陣進行酉變換,得到所述目標變換矩陣,具體包括:
13、根據所述雷達回波信號協方差矩陣對所述目標協方差矩陣進行分塊,根據分塊后的結果得到主子矩陣;
14、對所述主子矩陣進行特征值分解,得到所述主子矩陣的特征空間向量;
15、根據所述特征空間向量構造酉變換矩陣,根據所述酉變換矩陣對所述特征空間向量進行酉變換操作,得到所述目標變換矩陣。
16、可選地,所述獲取噪聲背景,當所述噪聲背景為高斯色噪聲背景時,對所述半徑向量進行壓縮和標準化,得到目標半徑矩陣,具體包括:
17、獲取噪聲背景,并判斷所述噪聲背景的類型;
18、當所述噪聲背景為高斯色噪聲背景時,根據所述酉變換矩陣和每個蓋氏圓的圓心,對所述半徑向量中的每個所述蓋氏圓半徑進行壓縮,得到多個壓縮半徑;
19、對每個所述壓縮半徑進行標準化處理,得到每個蓋氏圓的目標半徑;
20、根據所有所述目標半徑,生成所述目標半徑矩陣。
21、可選地,所述獲取噪聲背景,并判斷所述噪聲背景的類型,之后還包括:
22、當所述噪聲背景為高斯白噪聲背景時,對所述半徑向量進行對數變換,得到對數變換矩陣;
23、根據目標聚類算法對所述對數變換矩陣進行聚類,得到白噪聲聚類結果;
24、根據所述白噪聲聚類結果獲取白噪聲目標簇,根據所述白噪聲目標簇得到對應的雷達信源數目。
25、可選地,所述根據目標聚類算法對所述目標半徑矩陣進行聚類,得到聚類結果,具體包括:
26、獲取預設的距離閾值和最小鄰域數,將所述目標半徑矩陣、所述距離閾值和所述最小鄰域數作為輸入,進行聚類;
27、在聚類過程中,遍歷所述目標半徑矩陣中的每個元素,根據所述最小鄰域數選擇核心對象,加入到核心對象集合中并生成有序排列,計算每個所述核心對象的核心距離和可達距離,根據所述有序排列中的每個所述核心對象的所述核心距離和所述可達距離,將所有所述核心對象分別劃分到當前簇聚類、新聚類簇和噪聲點中的一個;
28、根據所述當前簇聚類、所述新聚類簇和所述噪聲點,生成聚類結果。
29、可選地,所述根據所述聚類結果獲取目標簇,根據所述目標簇得到雷達信源數目,具體包括:
30、計算所述聚類結果中所述當前簇聚類和所述新聚類簇的平均值,并選取平均值大的簇作為所述目標簇;
31、統計所述目標簇中元素的個數,將該個數作為雷達信源數目輸出。
32、此外,為實現上述目的,本發明還提供一種基于密度聚類的雷達信源數目檢測系統,其中,所述基于密度聚類的雷達信源數目檢測系統包括:
33、半徑向量生成模塊,用于根據目標雷達天線陣列信息生成天線陣列接收數據表示,根據天線陣列接收數據表示得到目標協方差矩陣,對所述目標協方差矩陣進行酉變換,得到目標變換矩陣,根據蓋氏圓定理,生成所述目標變換矩陣對應的半徑向量;
34、目標半徑矩陣生成模塊,用于獲取噪聲背景,當所述噪聲背景為高斯色噪聲背景時,對所述半徑向量進行壓縮和標準化,得到目標半徑矩陣;
35、聚類結果生成模塊,用于根據目標聚類算法對所述目標半徑矩陣進行聚類,得到聚類結果;
36、結果輸出模塊,用于根據所述聚類結果獲取目標簇,根據所述目標簇得到雷達信源數目。
37、此外,為實現上述目的,本發明還提供一種終端,其中,所述終端包括:存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運行的基于密度聚類的雷達信源數目檢測程序,所述基于密度聚類的雷達信源數目檢測程序被所述處理器執行時實現如上所述的基于密度聚類的雷達信源數目檢測方法的步驟。
38、此外,為實現上述目的,本發明還提供一種計算機可讀存儲介質,其中,所述計算機可讀存儲介質存儲有基于密度聚類的雷達信源數目檢測程序,所述基于密度聚類的雷達信源數目檢測程序被處理器執行時實現如上所述的基于密度聚類的雷達信源數目檢測方法的步驟。
39、本發明中,根據目標雷達天線陣列信息生成天線陣列接收數據表示,根據天線陣列接收數據表示得到目標協方差矩陣,對所述目標協方差矩陣進行酉變換,得到目標變換矩陣,根據蓋氏圓定理,生成所述目標變換矩陣對應的半徑向量;獲取噪聲背景,當所述噪聲背景為高斯色噪聲背景時,對所述半徑向量進行壓縮和標準化,得到目標半徑矩陣;根據目標聚類算法對所述目標半徑矩陣進行聚類,得到聚類結果;根據所述聚類結果獲取目標簇,根據所述目標簇得到雷達信源數目。本發明對高斯色噪聲背景下的信號協方差矩陣進行酉變換后得到的蓋氏圓半徑進行壓縮與標準化,從而減少冗余信息,提高噪聲信號的區分度,進而采用目標聚類算法對目標半徑矩陣進行聚類,通過聚類將對應的半徑分為噪聲簇和信號簇,進而有效區分噪聲和信號,從而提高了低信噪比和色噪聲下信號源數目估計的準確性。
- 還沒有人留言評論。精彩留言會獲得點贊!