智能浮式防波堤環境監測方法與流程
本發明涉及浮式防波堤,尤其涉及智能浮式防波堤環境監測方法。
背景技術:
1、隨著全球氣候變化和海洋環境的日益復雜化,海洋環境監測的重要性愈加突出,浮式防波堤作為一種重要的海洋結構物,廣泛應用于港口、海洋牧場和海上風電等領域,用于減緩波浪能量,保護港口和海上設施的安全,然而,傳統的浮式防波堤監測系統存在諸多不足,主要表現為監測數據不夠全面、實時性差、數據采集精度不足和缺乏有效的動態調節能力。
2、現有的浮式防波堤監測系統通常依賴單一類型的傳感器,難以實現對多種海洋環境參數的綜合監測,同時,海洋環境中的噪聲和振動對傳感器的干擾較大,導致數據采集的可靠性和準確性受到影響,此外,傳統的監測系統缺乏有效的模型校正機制,使得對海洋流體運動的預測精度較低,難以提供準確的環境信息和預警支持。
3、針對上述問題,本發明提出了一種智能浮式防波堤環境監測方法,通過綜合運用多種傳感器、氣泡幕噪聲屏蔽與減振技術、計算流體動力學(cfd)模型校正以及先進的數據分析與預警算法,實現了對海洋環境的綜合監測和實時調節,顯著提升了監測系統的性能和數據準確性。
技術實現思路
1、基于上述目的,本發明提供了智能浮式防波堤環境監測方法。
2、智能浮式防波堤環境監測方法,包括以下步驟:
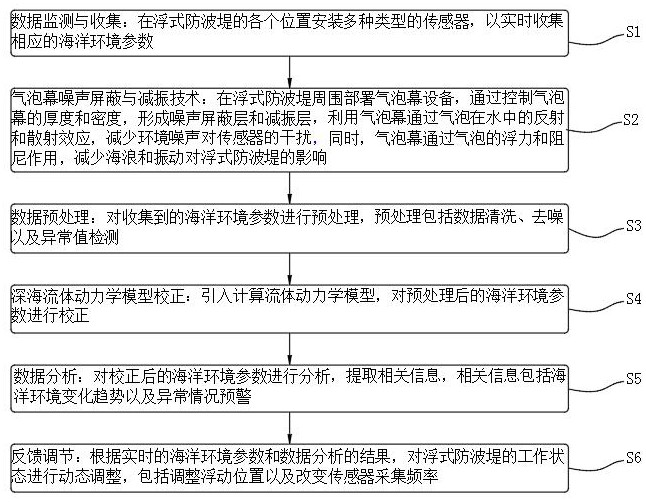
3、s1,數據監測與收集:在浮式防波堤的各個位置安裝多種類型的傳感器,以實時收集相應的海洋環境參數;
4、s2,氣泡幕噪聲屏蔽與減振技術:在浮式防波堤周圍部署氣泡幕設備,通過控制氣泡幕的厚度和密度,形成噪聲屏蔽層和減振層,利用氣泡幕通過氣泡在水中的反射和散射效應,減少環境噪聲對傳感器的干擾,同時,氣泡幕通過氣泡的浮力和阻尼作用,減少海浪和振動對浮式防波堤的影響;
5、s3,數據預處理:對收集到的海洋環境參數進行預處理,預處理包括數據清洗、去噪以及異常值檢測;
6、s4,深海流體動力學模型校正:引入計算流體動力學(cfd)模型,對預處理后的海洋環境參數進行校正;
7、s5,數據分析:對校正后的海洋環境參數進行分析,提取相關信息,相關信息包括海洋環境變化趨勢以及異常情況預警;
8、s6,反饋調節:根據實時的海洋環境參數和數據分析的結果,對浮式防波堤的工作狀態進行動態調整,包括調整浮動位置以及改變傳感器采集頻率。
9、進一步的,所述s1中的數據監測與收集包括:
10、s11,傳感器部署:在浮式防波堤上設置多個傳感器安裝點,并在安裝點上固定多種類型的傳感器,包括波浪傳感器、溫度傳感器、鹽度傳感器、ph傳感器、溶解氧傳感器和流速傳感器;
11、s12,實時數據收集:通過各種傳感器實時收集海洋環境參數,海洋環境參數包括波浪高度、海水溫度、鹽度、ph值、溶解氧以及流速。
12、進一步的,所述s2中的氣泡幕噪聲屏蔽與減振技術包括:
13、s21,氣泡幕設備安裝與控制:在浮式防波堤周圍安裝氣泡幕設備,氣泡幕設備沿防波堤的周邊均勻分布,通過氣泡幕設備的控制單元,調節氣泡的生成速率和氣泡幕的厚度和密度,所述控制單元包括氣體流量控制閥和壓力調節器;
14、s22,噪聲屏蔽層形成:利用氣泡幕在水中的反射和散射效應,形成噪聲屏蔽層,氣泡在水中產生聲波反射和散射,減少環境噪聲對傳感器的干擾;
15、s23,減振層形成:氣泡幕通過氣泡的浮力和阻尼作用,形成減振層,氣泡的浮力幫助浮式防波堤抵抗海浪的沖擊,氣泡的阻尼作用則減少防波堤的振動;
16、s24,氣泡幕狀態監測與調整:通過安裝在氣泡幕設備附近的氣泡幕傳感器,實時監測氣泡幕的狀態和效果,根據監測的氣泡幕數據,動態調節氣泡幕設備的工作參數。
17、進一步的,所述s4中的深海流體動力學模型校正包括:
18、s41,模型構建:構建計算流體動力學(cfd)模型,并將預處理后的海洋環境參數輸入到計算流體動力學(cfd)模型中,作為計算流體動力學(cfd)模型的輸入數據;
19、s42,數值模擬:利用計算流體動力學(cfd)模型對輸入數據進行數值模擬;
20、s43,結果校正:將計算流體動力學(cfd)模型模擬結果與實時收集的海洋環境參數進行對比,對海洋環境參數進行校正;
21、s44,校正輸出:輸出校正后的海洋環境參數,校正后的海洋環境參數作為輸出數據進行數據分析。
22、進一步的,所述計算流體動力學(cfd)模型包括:
23、三維流場模擬:使用navier-stokes方程描述海水的運動情況,考慮流體的不可壓縮性和非線性特性,進行三維流場模擬,計算公式為:
24、;
25、其中,u是流體速度向量,t是時間,是流體密度,p是壓力,v是動力粘度,f是外力;
26、湍流模擬:考慮海洋中存在的湍流現象,采用湍流模型對湍流運動進行建模,以捕捉流場中的湍流結構和能量傳遞,計算公式為:
27、;
28、;
29、其中,k是湍動能,是湍流耗散率,是湍流渦量,是湍流粘度,、、、是模型常數;
30、邊界條件:設置防波堤和周圍海域的邊界條件,以模擬真實海洋環境下的流體運動。
31、進一步的,所述邊界條件包括速度邊界條件、壓力邊界條件和湍流邊界條件,其中;
32、所述速度邊界條件包括:
33、入口邊界:設定海流或波浪進入模擬區域的速度邊界,使用非定常(隨時間變化的速度)邊界條件,計算公式為:
34、;
35、其中,是速度幅值,是波浪頻率;
36、出口邊界:設定流體離開模擬區域的速度邊界,使用零梯度邊界條件,允許流體自由流出,計算公式為:
37、;
38、其中,u是速度向量,n是邊界法向量;
39、防波堤表面:設定防波堤表面的速度邊界條件,使用無滑移邊界條件,使流體在固體表面處的速度為零,計算公式為:
40、u=0;
41、所述壓力邊界條件包括:
42、自由水面:設定海洋表面的壓力邊界條件,設置為常壓邊界條件,使流體表面壓力與大氣壓相等,計算公式為:
43、;
44、其中,是自由水面處的壓力,是大氣壓;
45、海床邊界:設定海底的壓力和速度邊界條件,使用無滑移速度邊界和固定壓力邊界,計算公式為:
46、速度邊界:u=0;
47、壓力邊界:;
48、其中,是海床處的壓力;
49、所述湍流邊界條件包括:
50、湍流強度和湍流黏度比:設定入口和出口邊界的湍流特性,根據k-epsilon模型設定湍流動能k和湍流耗散率,計算公式為:
51、湍流動能:;
52、湍流耗散率:;
53、其中,是入口速度,i是湍流強度,是k-epsilon模型常數,l是湍流長度尺度;
54、湍流模型參數:根據選擇的k-epsilon模型,設定入口處的湍流動能和湍流耗散率,計算公式為:
55、入口處的湍流動能:;
56、入口處的湍流耗散率:;
57、其中,是入口湍流強度。
58、進一步的,所述s42中的數值模擬包括:
59、s421,網格劃分:將模擬區域進行網格劃分,生成計算網格,通過網格劃分,將模擬區域離散化為小單元;
60、s422,設置邊界條件:設定模擬的邊界條件;
61、s423,選擇湍流模型:選擇k-epsilon模型并設置相應參數,計算公式為:
62、湍流動能:;
63、湍流耗散率:;
64、其中,k是湍流動能,是湍流耗散率,是湍流產生項,和是模型常數;
65、s424,求解流體運動方程:對流體的連續性方程和動量方程進行離散化處理,計算流場的速度和壓力分布,計算公式為:
66、;
67、;
68、其中,u是流體速度向量,p是壓力,是動力粘度,f是體積力(如重力);
69、s425,迭代求解:使用simple算法求解離散化后的方程,直到收斂標準滿足為止。
70、進一步的,所述s43中的結果校正包括:
71、s431,識別差異:將數值模擬的結果與實時收集的海洋環境參數進行對比分析,通過對比分析,識別實時海洋環境參數與數值模擬的結果之間的差異和偏差;
72、s432,校正參數:根據識別出的差異,對海洋環境參數進行校正;
73、s433,驗證校正效果:重新進行數值模擬,并將校正后的模擬結果與實時海洋環境參數進行對比,驗證校正效果。
74、進一步的,所述s5中的數據分析包括:
75、s51,海洋環境變化趨勢分析:基于校正后的海洋環境參數,利用線性回歸模型對海洋環境參數的變化趨勢進行分析;
76、s52,異常情況預警:根據校正后的海洋環境參數,建立異常檢測模型,異常檢測模型采用支持向量機(svm)模型,通過監測海洋環境參數的變化情況,識別和預警異常情況。
77、本發明的有益效果:
78、本發明,通過智能浮式防波堤環境監測方法,實現了對海洋環境的綜合監測和數據分析,通過在浮式防波堤上安裝多種類型的傳感器,實時收集包括波浪高度、海水溫度、鹽度、ph值、溶解氧和流速在內的多種海洋環境參數,并利用氣泡幕噪聲屏蔽與減振技術提高數據采集的精度和可靠性,通過對校正后的海洋環境參數進行分析,提取海洋環境變化趨勢和異常情況預警信息,為海洋環境的監測和管理提供了準確的環境信息和預警支持,具備實時監控和動態調節功能。
79、本發明,通過引入計算流體動力學模型,對預處理后的海洋環境參數進行校正,特別是針對流速參數,顯著提高了對海洋流體運動的預測精度,cfd模型考慮了海水的不可壓縮性、非線性特性和湍流現象,能夠精確模擬防波堤周圍復雜的流體動態,通過動態調整和校正cfd模型,實時反映海洋環境的變化,提供更加準確的流速、流向和壓力等參數,為后續的數據分析和反饋調節提供可靠依據,提升了監測系統的整體性能和數據可靠性。
80、本發明,通過線性回歸模型分析海洋環境參數的變化趨勢,幫助預測海洋環境的演變,建立異常檢測模型進行異常情況預警,有效識別和預警突發的水質污染、異常海流變化等情況,能夠為海洋環境監測和管理提供重要的支持和參考,確保監測數據的可靠性和準確性,為海洋資源保護和利用提供科學依據。
- 還沒有人留言評論。精彩留言會獲得點贊!