一種低空慢速小型目標的低成本雷達探測系統的制作方法
本技術涉及雷達探測,特別是涉及一種低空慢速小型目標的低成本雷達探測系統。
背景技術:
1、“低空慢速小型”目標通常是指飛行高度小于1000m、飛行速度小于200km/h、雷達反射面積小于兩平米的飛行物體,具有成本低、技術成熟、目標特征小等特點,隨著無人機技術的成熟和各種用途無人機產品的普及,不斷被不法分子用于攜帶爆炸物等危險物品執行多種攻擊及破壞活動,由于雷達反射面積有限,因此產生的回波信號強度較低,且低空飛行目標會受到地面雜波的強烈干擾,這些雜波與目標回波相互疊加,導致雷達系統難以準確區分并鎖定目標,因此,如何快速、準確捕捉到“低空慢速小型”目標的存在,是一個亟待解決的問題。
技術實現思路
1、基于此,有必要針對上述技術問題,提供一種能夠快速、準確捕捉到“低空慢速小型”目標的存在的低空慢速小型目標的低成本雷達探測系統。
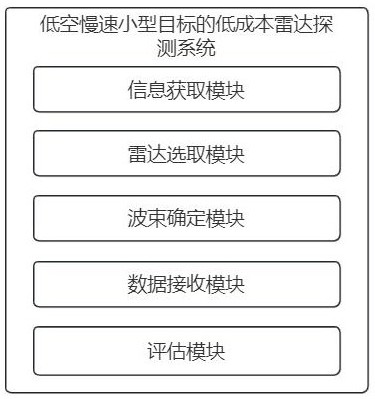
2、本技術提供一種低空慢速小型目標的低成本雷達探測系統,所述系統包括:
3、信息獲取模塊,用于獲取待布控雷達區域的環境信息,基于所述環境信息,確定雷達的天線單元數量;
4、雷達選取模塊,用于根據所述雷達的天線單元數量,選取目標雷達,并將所述目標雷達在所述待布控雷達區域進行布控;
5、波束確定模塊,用于根據當前時刻所屬的時間區間,確定所述目標雷達在當前時刻對應的初始波束方向和波束方向偏移值,其中,時間區間用于描述在待布控雷達區域中低空慢速小型目標的歷史飛行時間;
6、數據接收模塊,用于基于所述初始波束方向和所述波束方向偏移值,運行所述目標雷達,并獲取所述目標雷達接收到的探測數據;
7、評估模塊,用于結合所述探測數據和所述時間區間,確定目標評估模型,將所述探測數據輸入至所述目標評估模型,得到輸出結果,并根據所述輸出結果,確定目標識別結果。
8、可選的,其特征在于,獲取待布控雷達區域的環境信息包括:
9、獲取待布控雷達區域的地理位置信息,所述地理位置信息至少包括經緯度信息;
10、根據所述經緯度信息,確定所述待布控雷達區域的環境信息,所述環境信息至少包括自然環境信息和人文環境信息。
11、可選的,其特征在于,基于所述環境信息,確定雷達的天線單元數量包括:
12、根據所述自然環境信息和人文環境信息,確定待布控雷達區域的第一目標閾值;
13、獲取待布控雷達區域與其他雷達基站的間距,根據所述間距,確定預設距離區間范圍內的雷達基站數量,以及各雷達基站與待布控雷達區域之間的間距和值;
14、根據所述雷達基站數量和所述間距和值,對所述待布控雷達區域的第一目標閾值進行修正,得到第二目標閾值;
15、根據目標閾值和雷達天線單元數量之間的映射關系,確定所述第二目標閾值對應的雷達天線單元數量;
16、將所述第二目標閾值對應的雷達天線單元數量定義為所述雷達的天線單元數量。
17、可選的,其特征在于,所述第二目標閾值的計算方法包括:
18、對所述自然環境信息、人文環境信息、雷達基站數量和間距和值進行歸一化處理,得到目標數據集;
19、基于所述目標數據集中的自然環境信息和人文環境信息,計算確定所述第一目標閾值,所述第一目標閾值的計算方法包括:
20、
21、其中,表示第個位置節點的第一目標閾值,表示自然環境信息擬合值,和均表示權系數,表示人文環境信息擬合值;
22、基于所述目標數據集中的雷達基站數量和間距和值,對所述第一目標閾值進行修正,用于修正所述第一目標閾值的算法包括:
23、
24、其中,表示第二目標閾值,表示修正函數,表示間距和值,表示雷達基站數量,表示第m個雷達基站與待布控雷達區域之間的間距;
25、基于所述第一目標閾值的修正結果,確定所述第二目標閾值。
26、可選的,其特征在于,根據所述雷達的天線單元數量,選取目標雷達,并將所述目標雷達在所述待布控雷達區域進行布控包括:
27、將目標天線單元數量大于或等于所述雷達的天線單元數量對應的雷達定義為所述目標雷達;
28、將所述目標雷達在所述待布控雷達區域進行布控。
29、可選的,其特征在于,根據當前時刻所屬的時間區間,確定所述目標雷達在當前時刻對應的初始波束方向和波束方向偏移值包括:
30、獲取當前時刻所屬的目標時間區間,并根據時間區間和標識符之間的映射關系,確定所述目標時間區間對應的標識符,所述時間區間和標識符之間的映射關系的生成方法包括:
31、獲取預設時間周期內,在待布控雷達區域預設范圍內的低空慢速小型目標的歷史飛行時間,并基于飛行起始時間和飛行結束時間對目標歷史飛行時間進行標記,得到所述目標歷史飛行時間對應的第一標識符;
32、響應于在多個預設時間周期內出現所述第一標識符的次數大于預設次數閾值,對所述目標歷史飛行時間進行二次標記,得到所述目標歷史飛行時間對應的第二標識符;
33、獲取帶有第二標識符的目標歷史飛行時間對應低空慢速小型目標的飛行方向,響應于當前時刻在所述目標歷史飛行時間對應的時間范圍內,將所述飛行方向的初始方向定義為所述初始波束方向,并根據飛行起始時間和飛行結束時間,確定波束方向偏移值;
34、響應于當前時刻不在所述目標歷史飛行時間對應的時間范圍內,將任意方向定義為所述初始波束方向,將標準波束指向角度定義為波束方向偏移值。
35、可選的,其特征在于,所述方法還包括:
36、根據多個天線單元的信號值和波束方向偏移值,來運行所述目標雷達,以獲取所述目標雷達接收到的探測數據,所述天線單元的信號值的計算方法包括:
37、
38、其中,表示第m個天線單元的信號值,表示幅度,表示角頻率,表示時間,表示天線單元間距,表示波長,表示角度,表示修正參數。
39、可選的,其特征在于,結合所述探測數據和所述時間區間,確定目標評估模型,將所述探測數據輸入至所述目標評估模型,得到輸出結果,并根據所述輸出結果,確定目標識別結果包括:
40、響應于探測數據接收時間所屬的時間區間存在第二標識符,確定第一評估模型為目標評估模型,將所述探測數據進行歸一化處理后輸入至所述第一評估模型,得到第一輸出結果,并根據所述第一輸出結果,確定目標識別結果;
41、響應于探測數據接收時間所屬的時間區間不存在第二標識符,確定第二評估模型為目標評估模型,將所述探測數據進行歸一化處理后輸入至所述第二評估模型,得到第二輸出結果,并根據所述第二輸出結果,確定目標識別結果。
42、可選的,基于所述第一評估模型,確定目標識別結果包括:
43、將所述探測數據進行歸一化處理后輸入至所述第一評估模型,得到第一輸出結果,所述第一評估模型包括:
44、
45、
46、其中,表示第一輸出結果,表示第一修正函數,表示單位時間內的位置差,表示單位時間內的速度差,表示形態大小,表示干擾源個數,表示第e個干擾源激發風險的概率值,表示第e個干擾源的影響值,表示常數;
47、響應于所述第一輸出結果大于第一預設閾值,確定所述目標識別結果為非正常目標,向終端發出預警信息。
48、可選的,其特征在于,基于所述第二評估模型,確定目標識別結果包括:
49、將所述探測數據進行歸一化處理后輸入至所述第二評估模型,得到第二輸出結果,所述第二評估模型包括:
50、
51、
52、其中,表示第二輸出結果,表示第二修正函數;
53、響應于所述第二輸出結果大于第二預設閾值,確定所述目標識別結果為非正常目標,向終端發出預警信息,其中,所述第二預設閾值大于所述第一預設閾值。
54、上述低空慢速小型目標的低成本雷達探測系統,所述系統包括:信息獲取模塊,用于獲取待布控雷達區域的環境信息,基于所述環境信息,確定雷達的天線單元數量;雷達選取模塊,用于根據所述雷達的天線單元數量,選取目標雷達,并將所述目標雷達在所述待布控雷達區域進行布控;波束確定模塊,用于根據當前時刻所屬的時間區間,確定所述目標雷達在當前時刻對應的初始波束方向和波束方向偏移值,其中,時間區間用于描述在待布控雷達區域中低空慢速小型目標的歷史飛行時間;數據接收模塊,用于基于所述初始波束方向和所述波束方向偏移值,運行所述目標雷達,并獲取所述目標雷達接收到的探測數據;評估模塊,用于結合所述探測數據和所述時間區間,確定目標評估模型,將所述探測數據輸入至所述目標評估模型,得到輸出結果,并根據所述輸出結果,確定目標識別結果,本技術可以提高低空慢速小型目標的識別準確度和速度,降低了雷達探測成本。
- 還沒有人留言評論。精彩留言會獲得點贊!